
수업 2: 안전 장치 및 예방 조치
이번 수업에서는 사고를 예방하고 근로자의 안전을 보장하는 또 다른 중요한 안전 조치인 비상 정지에 대해 알아보겠습니다.
다음 내용을 배우게 됩니다:
- 비상 정지란 무엇이고, 어떤 용도로 사용되는가?
- 통제 정지와 비통제 정지의 차이.
- 산업용 로봇의 기타 안전 장치 및 표준.
- CTE Workcell의 제어된 정지 기능
이 수업을 마치면 엔지니어링 노트에 적힌 질문에 답하면서 배운 내용을 복습하게 됩니다.
비상 정지
비상 정지, 즉 e-stop은 위험한 상황이 발생했을 때 작업자와 장비를 위험으로부터 안전하게 보호하기 위해 고안된 필수적인 안전 장치입니다. 비상 정지는 산업 자동화 전반에 걸쳐 표준으로 적용되며, 비상 상황에서 로봇 작업을 신속하게 중단하여 작업자의 부상을 방지하고 장비를 보호하도록 설계되었습니다. 비상 정지는 푸시 버튼과 같은 단일 동작으로 실행됩니다. 비상 정지가 발령되면 작업자는 작업을 안전하게 재개하기 위해 의도적으로 행동해야 합니다.

산업용 로봇에서는 다양한 상황에서 비상 정지가 실행될 수 있습니다. 예를 들어, 모터 고장이나 프로그래밍 오류는 장비나 인력에 위험을 초래할 수 있습니다. 오류가 감지되면 작업자는 비상 정지 명령을 내려 작업셀에 작업을 중단하라고 지시할 수 있습니다. 비상 정지가 활성화될 수 있는 다른 사례로는 다음과 같은 예상치 못한 위험이 있습니다.
- 화재.
- 로봇 팔의 경로로 들어가는 작업자.
- 로봇 팔의 범위에 장애물이 떨어져 충돌이 발생할 가능성이 있습니다.
비상 정지 명령을 발동하면 근로자에게 해를 끼치는 것을 방지하고 막대한 손해를 방지하는 데 도움이 됩니다.
통제 정지 vs. 통제되지 않은 정지
비상 정지에는 통제된 정지와 통제되지 않은 정지의 두 가지 유형이 있습니다. 통제 정지를 사용할지, 통제되지 않은 정지를 사용할지는 상황에 따라 달라집니다. 제어 정지 점차 감소하지만 기계의 전원을 완전히 제거하지는 않습니다. 예를 들어, 조립 라인에서 작업자가 무거운 자동차 섀시 아래에 위치하고 로봇 팔이 방해를 받아 비상 정지가 발생한 경우, 통제된 정지가 사용됩니다. 이렇게 하면 점차적으로 모든 움직임이 느려지고, 기계가 부드럽게 멈추어 작업자가 길을 비울 시간을 벌 수 있습니다.
무제어 정지 기계의 모든 전원을 즉시 차단합니다. 자동차 섀시의 경우, 모든 전원이 제거되면 섀시가 아래에 있는 작업자에게 떨어질 수 있습니다. 그러나 전기 화재와 같은 사건의 경우, 통제 불가능한 정지가 사용되어 기계의 모든 전원이 즉시 차단됩니다.
산업용 로봇의 비상 정지에 대한 표준
산업 로봇 분야에서는 산업 전반의 표준과 법률이 비상 정지 기능의 사용을 규제하여 산업 전반에 걸쳐 높은 수준의 근로자 안전을 보장하는 데 도움이 됩니다. 이러한 표준 기관 중 일부는 다음과 같습니다.
- 로봇산업협회(RIA): 산업용 로봇의 안전 기준을 정하는 협회.
- 미국 표준 협회(ANSI): 미국 내 직장 안전에 대한 표준을 유지하는 기관.
- 국제표준화기구(ISO): 직장 안전에 대한 국제 표준을 유지하는 조직.
- 직업 안전 및 건강 관리국(OSHA): 직장 안전 규정을 설정하고 시행하는 연방 행정부.
표준화 유형에는 비상 정지를 작동시키는 데 사용되는 메커니즘 유형, 메커니즘의 색상, 메커니즘의 위치 등이 있습니다. 예를 들어, 눈에 잘 띄도록 비상 정지 표지판은 빨간색과 노란색으로 표시해야 합니다. 이러한 장치는 작동을 위해 단 한 번의 동작만 필요해야 하며, 로봇 팔이 닿지 않는 곳에 위치해야 하므로 작업자가 위험한 곳으로 들어가 작동시킬 필요가 없습니다. 또한 작업자가 쉽게 접근할 수 있는 위치에 배치해야 합니다. 이는 e-stop을 사용할 때 근로자의 안전을 보장하기 위해 마련된 몇 가지 표준에 불과합니다.

기타 안전 장치
산업용 로봇 작업자의 안전을 보장하기 위해 다양한 장치가 사용됩니다. 안전 장치는 종종 서로 결합하여 사용됩니다. 실제 산업 현장에서는 근로자의 안전을 보장하기 위해 다음을 포함한 다양한 안전 장치, 메커니즘 및 예방 조치를 사용합니다.
- 안전 장벽 및 보호 장치: 우발적인 접촉을 방지하기 위해 로봇과 인간 작업자를 분리하는 물리적 장벽입니다. 여기에는 위험한 지역에 대한 접근을 제한하기 위해 설계된 울타리, 철장 및 기타 구조물이 포함됩니다.
- 존재 감지 장치: 지정된 영역 내에 사람이나 물체의 존재를 감지하는 센서. 침입이 감지되면 로봇 작동을 중지할 수 있습니다.
- 센서 암: 사람이나 물체와의 접촉을 감지하는 센서가 장착된 로봇 팔입니다. 이러한 센서는 부상이나 손상을 방지하기 위해 로봇을 종료하거나 속도를 늦출 수 있습니다.
- 압력 매트: 로봇 주변 바닥에 놓아 압력이나 무게를 감지하는 매트입니다. 사람이 매트를 밟으면 로봇은 작동을 멈춰 사고를 방지합니다.
- 알람: 작업자에게 로봇의 활성 여부나 안전하지 않은 상황에 대한 경고를 제공하는 청각적 및 시각적 경고 시스템입니다. 이러한 경보는 다양한 안전 시스템을 통해 발령될 수도 있고, 작업자가 수동으로 발령할 수도 있습니다.
- 광커튼: 위험 구역 주변에 보이지 않는 장벽을 만드는 광선 배열입니다. 빔이 차단되면 로봇은 즉시 멈춰서 인력의 안전을 보장합니다.
CTE 작업 셀의 제어 정지
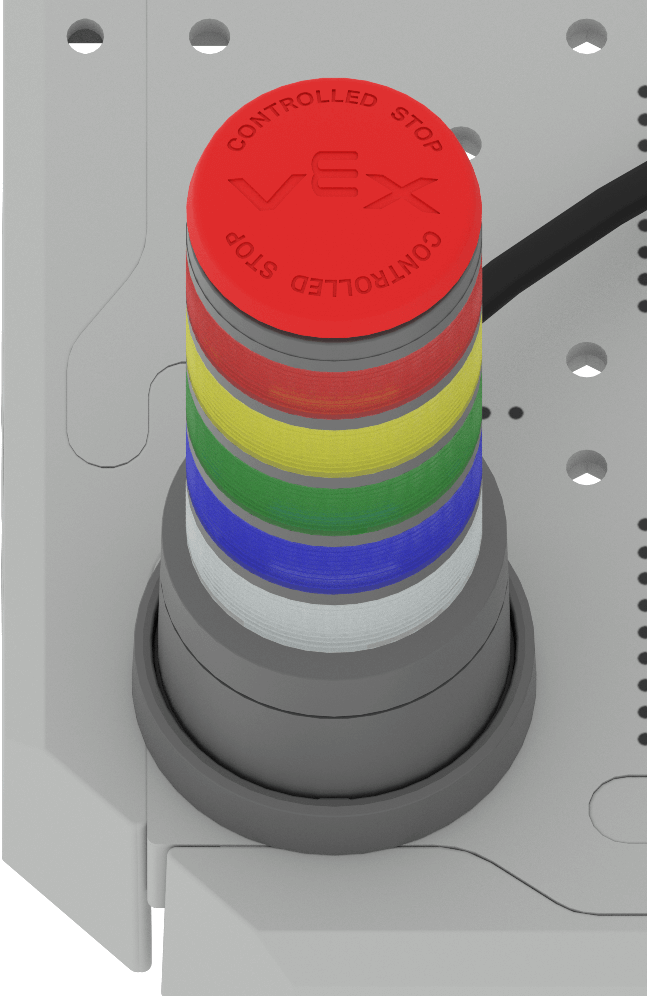
CTE 워크셀에서는 신호탑 상단의 버튼을 누르면 제어된 정지가 실행됩니다.
표면에 "제어된 정지"라고 적힌 버튼이 보입니다. 제어된 정지 기능으로 코딩된 경우, 작업셀의 어떤 구성 요소가 그 자체나 사용자에게 손상을 줄 수 있는 방식으로 움직이는 경우 버튼을 누를 수 있습니다.
신호탑 범퍼를 눌렀을 때?블록은 제어된 정지 기능을 코딩하는 데 사용됩니다.
Brain CTE 6축 Arm Template 프로젝트에는 제어된 정지 기능을 구현하는 블록 스택이 있습니다. 다음 수업에서는 신호탑 코딩에 대해 자세히 알아보겠습니다.

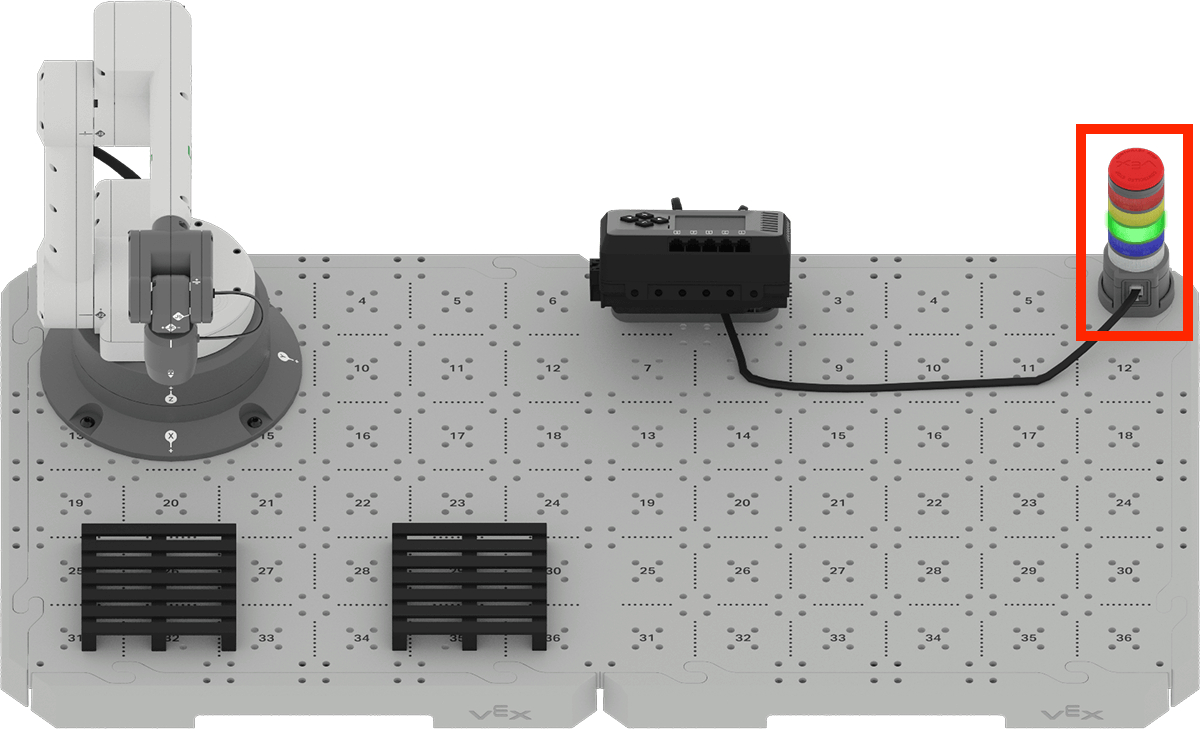
빌드의 신호탑은 6축 암의 경로 밖에 위치해 있어 필요한 경우 안전하게 쉽게 누를 수 있습니다.
이해도 확인
다음 수업으로 넘어가기 전에 엔지니어링 노트북에서 아래 문서의 질문에 답하여 이 수업에서 다룬 개념을 이해했는지 확인하세요.
이해도 확인 질문 > (Google Doc / .docx / .pdf)
다음 레슨으로 넘어가려면다음 >선택하세요.