
In dieser Lektion lernen Sie eine weitere wichtige Sicherheitsmaßnahme kennen, die Unfälle verhindert und die Arbeitssicherheit gewährleistet, den Not-Aus.
Sie lernen:
- Was ein Not-Halt ist und wofür er verwendet wird.
- Der Unterschied zwischen kontrollierten und unkontrollierten Stopps.
- Andere Sicherheitsmechanismen und -standards in der Industrierobotik.
- Funktionsweise des gesteuerten Stopps am CTE-Workcell.
Am Ende dieser Lektion besprechen Sie, was Sie gelernt haben, während Sie Fragen in Ihrem technischen Notizbuch beantworten.
Not-Halt
Ein Not-Halt, auch bekannt als Not-Halt, ist ein wichtiger Sicherheitsmechanismus, der entwickelt wurde, um Arbeiter und Ausrüstung im Falle einer gefährlichen Situation vor Schäden zu schützen. E-Stops sind Standard in der gesamten industriellen Automatisierung und wurden entwickelt, um den Roboterbetrieb in Notfällen schnell zu stoppen, Verletzungen von Arbeitern zu verhindern und Ausrüstung zu schützen. Ein Not-Aus wird durch eine einzige Aktion ausgelöst, z. B. durch einen Druckknopf. Sobald ein Not-Aus eingeleitet wurde, muss ein Bediener absichtlich handeln, um den Betrieb sicher wieder aufzunehmen.

In der Industrierobotik können Notstopps unter verschiedenen Umständen ausgelöst werden. Beispielsweise kann ein Motorausfall oder ein Programmierfehler ein Risiko für Geräte oder Personal darstellen. Wenn der Fehler erkannt wird, kann ein Not-Aus durch einen Arbeiter eingeleitet werden, der die Arbeitszelle auffordert, den Betrieb einzustellen. Andere Fälle, in denen E-Stops aktiviert werden könnten, sind unvorhergesehene Gefahren, wie zum Beispiel:
- brände.
- ein Arbeiter, der in den Weg eines Roboterarms tritt.
- ein Hindernis, das in den Bereich eines Roboterarms fällt und eine Kollision wahrscheinlich macht.
Das Auslösen eines Not-Aus kann Schäden an den Arbeitnehmern verhindern und dazu beitragen, teure Schäden zu vermeiden.
Kontrollierte Stopps vs. unkontrollierte Stopps
Es gibt zwei Kategorien von Notstopps: kontrolliert und unkontrolliert. Ob ein kontrollierter oder unkontrollierter Stopp verwendet wird, hängt von der Situation ab. Ein kontrollierter Stopp schaltet sich allmählich ab, schaltet die Maschinen jedoch nicht vollständig ab. Wenn beispielsweise Arbeiter an einer Montagelinie unter einem schweren Fahrzeugchassis positioniert würden und ein Notstopp aufgrund einer Behinderung eines Roboterarms ausgelöst würde, würde ein gesteuerter Stopp verwendet werden. Dies würde nach und nach jede Bewegung verlangsamen, so dass die Maschinen reibungslos zum Stillstand kommen und den Arbeitern Zeit geben würden, aus dem Weg zu gehen.
Ein unkontrollierter Stopp schaltet die Maschinen sofort vollständig aus. Im Beispiel des Fahrzeugchassis könnte die Entfernung der gesamten Stromversorgung dazu führen, dass das Chassis auf die darunter liegenden Arbeiter fällt. Bei einem Ereignis wie einem elektrischen Brand würde jedoch ein unkontrollierter Stopp verwendet werden, da die gesamte Stromversorgung der Maschine sofort unterbrochen würde.
Normen für Not-Aus in der Industrierobotik
Branchenweite Standards und Gesetze regeln die Verwendung von E-Stops in der Industrierobotik und tragen dazu bei, einen hohen Standard der Arbeitssicherheit in der gesamten Branche zu gewährleisten. Einige dieser Normungsgremien sind:
- Robotic Industry Association (RIA): Der Verband, der Sicherheitsstandards für Industrieroboter setzt.
- American National Standards Institute (ANSI): Ein Institut, das Standards für die Arbeitssicherheit in den Vereinigten Staaten aufrechterhält.
- Internationale Organisation für Normung (ISO): Eine Organisation, die die internationalen Standards für Arbeitssicherheit einhält.
- Arbeitsschutzbehörde (OSHA): Die Bundesverwaltung, die Vorschriften zur Arbeitssicherheit festlegt und durchsetzt.
Zu den Arten der Standardisierung gehören die Art des Mechanismus, der zum Auslösen eines Not-Aus verwendet wird, die Farbe des Mechanismus und die Positionierung des Mechanismus. Zum Beispiel sollten E-Stops für eine hohe Sichtbarkeit rot und gelb gefärbt sein. Sie sollten nur eine einzige Aktion erfordern, um sie zu initiieren, und sollten außerhalb der Reichweite eines Roboterarms positioniert werden, damit die Arbeiter nicht in Gefahr geraten müssen, um sie zu aktivieren. Sie sollten auch an einem Ort platziert werden, der für die Bediener leicht zugänglich ist. Dies sind nur einige der Standards, die vorhanden sind, um die Sicherheit der Mitarbeiter bei der Verwendung von E-Stops zu gewährleisten.

Sonstige Sicherheitsmechanismen
Viele andere Geräte werden verwendet, um die Sicherheit der Bediener von Industrierobotern zu gewährleisten. Sicherheitsmechanismen werden häufig in Verbindung miteinander verwendet. Reale Industrieumgebungen verwenden eine Vielzahl von Sicherheitsvorrichtungen, -mechanismen und -vorkehrungen, um die Arbeitssicherheit zu gewährleisten, einschließlich:
-
Sicherheitsbarrieren und Schutzvorrichtungen: Physische Barrieren, die Roboter von menschlichen Arbeitern trennen, um versehentlichen Kontakt zu verhindern. Dazu gehören Zäune, Käfige und andere Strukturen, die den Zugang zu gefährlichen Bereichen einschränken sollen.
-
Anwesenheitserfassungsgeräte: Sensoren, die die Anwesenheit von Menschen oder Objekten in einem bestimmten Bereich erkennen. Diese können den Roboterbetrieb stoppen, wenn ein Eindringen erkannt wird.
-
Sensorarme: Roboterarme, die mit Sensoren ausgestattet sind, um den Kontakt mit Menschen oder Objekten zu erkennen. Diese Sensoren können eine Abschaltung auslösen oder den Roboter verlangsamen, um Verletzungen oder Schäden zu vermeiden.
-
Druckmatte: Matten, die auf dem Boden um den Roboter herum platziert werden und Druck oder Gewicht erfassen. Wenn eine Person auf die Matte tritt, stellt der Roboter den Betrieb ein, um Unfälle zu vermeiden.
-
Alarme: Akustische und visuelle Warnsysteme, die die Mitarbeiter auf das Vorhandensein eines aktiven Roboters oder einen unsicheren Zustand aufmerksam machen. Diese Alarme können durch verschiedene Sicherheitssysteme oder manuell durch Bediener ausgelöst werden.
-
Lichtvorhänge: Arrays von Lichtstrahlen, die eine unsichtbare Barriere um explosionsgefährdete Bereiche bilden. Wenn ein Strahl unterbrochen wird, wird der Roboter sofort angehalten, um die Sicherheit des Personals zu gewährleisten.
Der kontrollierte Stopp auf der CTE-Arbeitszelle
Auf der CTE-Arbeitszelle kann eine Taste auf der Oberseite des Signalturms einen gesteuerten Stopp auslösen, wenn sie gedrückt wird.
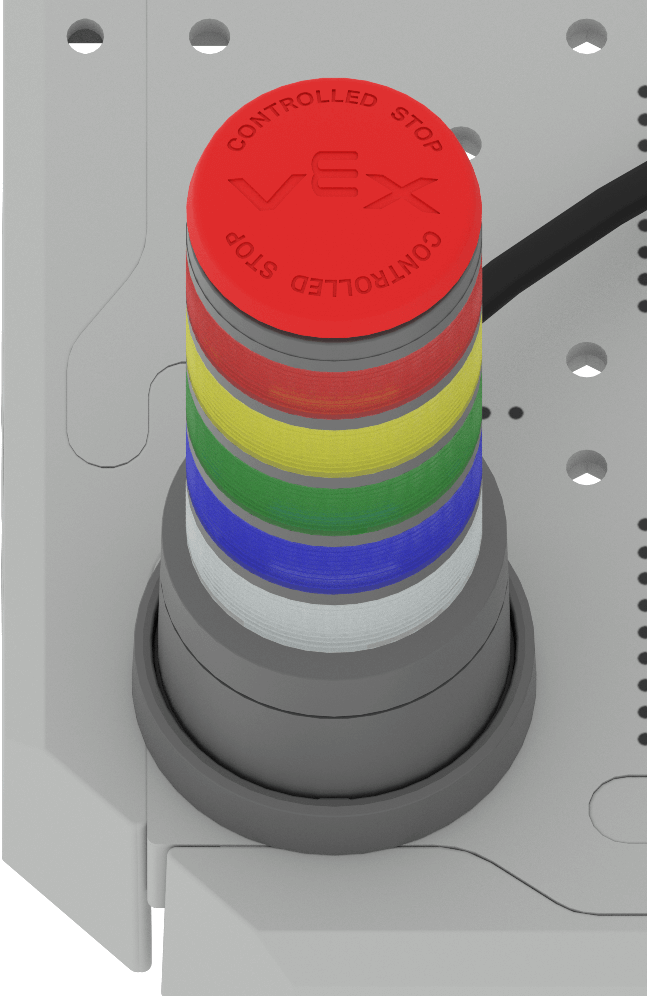
Sie werden feststellen, dass die Taste auf der Oberfläche „Controlled Stop“ (Kontrollierter Stopp) anzeigt. Wenn die Taste so codiert ist, dass sie als kontrollierter Stopp dient, kann sie gedrückt werden, wenn sich eine Komponente der Arbeitszelle in einer Weise bewegt, die sich selbst oder den Benutzer schädigt.
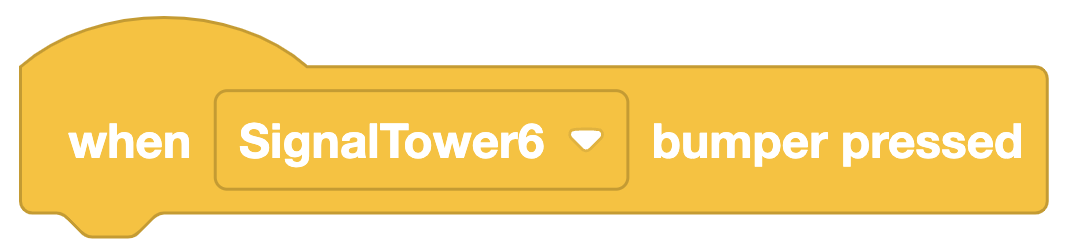
Der Block When signal tower bumper pressed? wird verwendet, um die gesteuerte Stoppfunktionalität zu codieren.
Im Brain CTE 6-Axis Arm Template-Projekt gibt es einen Stapel von Blöcken, der eine kontrollierte Stoppfunktionalität ermöglicht. In der nächsten Lektion erfahren Sie mehr über das Codieren des Signalturms.
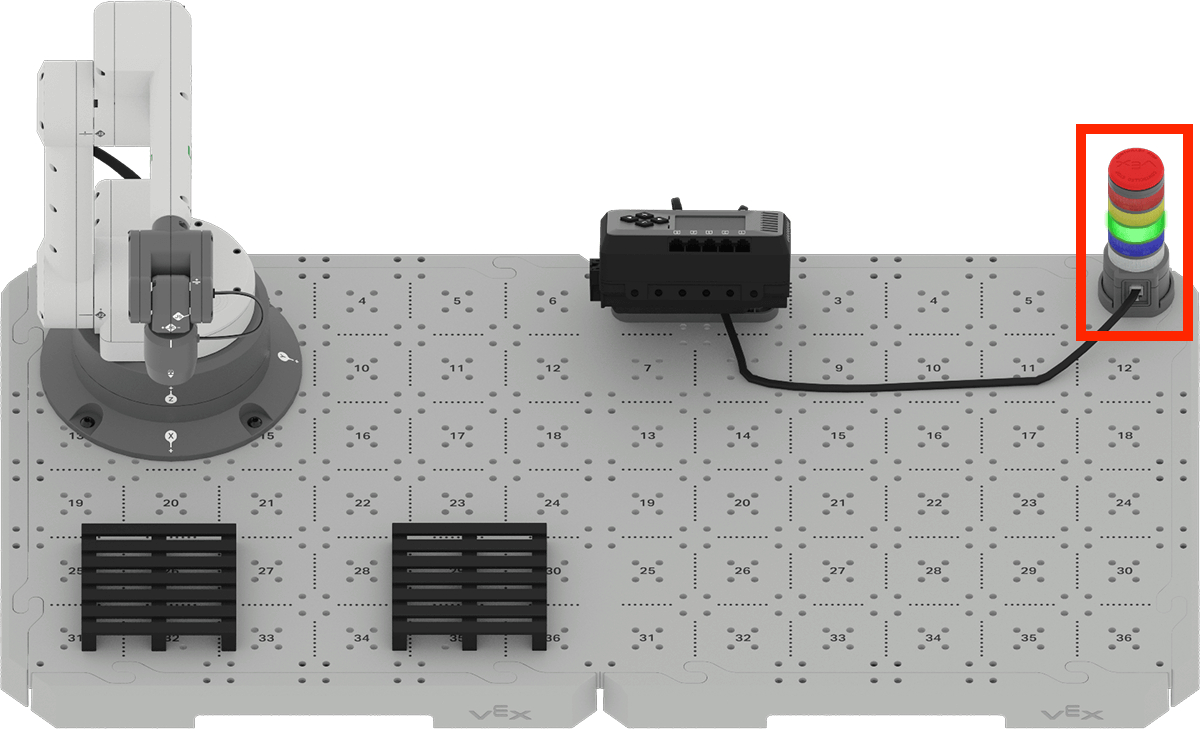
Sie werden feststellen, dass sich der Signalturm an Ihrem Gebäude außerhalb des Weges des 6-Achsen-Arms befindet, so dass er bei Bedarf leicht und sicher gedrückt werden kann.
Überprüfe dein Verständnis
Bevor Sie mit der nächsten Lektion fortfahren, stellen Sie sicher, dass Sie die in dieser Lektion behandelten Konzepte verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum Verständnis prüfen > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > , um mit der nächsten Lektion fortzufahren.