
Les 2: Veiligheidsmechanismen en voorzorgsmaatregelen
In deze les leert u over een andere belangrijke veiligheidsmaatregel die ongelukken voorkomt en de veiligheid van werknemers waarborgt: de noodstop.
Je leert:
- Wat een noodstop is en waarvoor deze gebruikt wordt.
- Het verschil tussen gecontroleerde en ongecontroleerde stops.
- Andere veiligheidsmechanismen en normen in industriële robotica.
- Hoe de gecontroleerde stop op de CTE-werkcel functioneert.
Aan het einde van deze les herhaalt u wat u hebt geleerd terwijl u vragen beantwoordt in uw technische notitieboekje.
Noodstops
Een noodstop, ook wel e-stop genoemd, is een belangrijk veiligheidsmechanisme dat is ontworpen om werknemers en apparatuur te beschermen tegen letsel in het geval van een gevaarlijke situatie. Noodstops zijn standaard in de industriële automatisering en zijn ontworpen om robotactiviteiten in noodsituaties snel te stoppen, om letsel bij werknemers te voorkomen en apparatuur te beschermen. Een noodstop wordt geactiveerd door één enkele actie, bijvoorbeeld het indrukken van een knop. Zodra een noodstop is geactiveerd, moet een operator doelgericht handelen om de werkzaamheden veilig te hervatten.

In de industriële robotica kunnen noodstops in verschillende omstandigheden worden geactiveerd. Een motorstoring of een programmeerfout kan bijvoorbeeld een risico vormen voor apparatuur of personeel. Wanneer de fout wordt gedetecteerd, kan een werknemer een noodstop in gang zetten en de werkcel opdracht geven de werkzaamheden te staken. Andere gevallen waarin noodstops kunnen worden geactiveerd, zijn onvoorziene gevaren, zoals:
- branden.
- een arbeider die in de weg van een robotarm stapt.
- een obstakel dat binnen het bereik van een robotarm valt en een botsing waarschijnlijk maakt.
Door een noodstop in te schakelen, voorkomt u letsel bij werknemers en kostbare schade.
Gecontroleerde stops versus ongecontroleerde stops
Er zijn twee categorieën noodstops: gecontroleerde en ongecontroleerde. Of er een gecontroleerde of ongecontroleerde stop moet worden gebruikt, hangt af van de situatie. Bij een gestuurde stop wordt de stroomtoevoer naar de machines geleidelijk verlaagd, maar niet volledig afgesloten. Als bijvoorbeeld werknemers onder een zwaar autochassis op een assemblagelijn worden geplaatst en er een noodstop wordt geactiveerd door een blokkade van een robotarm, dan wordt er gebruikgemaakt van een gecontroleerde stop. Hierdoor zou de beweging geleidelijk worden vertraagd, waardoor de machine soepel tot stilstand kon komen en de arbeiders tijd hadden om aan de kant te gaan.
Bij ongecontroleerde stop wordt onmiddellijk alle stroom naar de machines afgesloten. In het voorbeeld van het autochassis zou het uitschakelen van alle stroom ertoe kunnen leiden dat het chassis op de werknemers eronder valt. Echter, in een geval als een elektrische brand zou er een ongecontroleerde stop worden toegepast, omdat hiermee alle stroom naar de machines onmiddellijk zou worden afgesloten.
Normen voor noodstops in industriële robotica
Er gelden sectorbrede normen en wetten voor het gebruik van noodstops in industriële robotica. Hiermee wordt bijgedragen aan een hoog niveau van veiligheid voor werknemers in de hele sector. Enkele van deze normalisatie-instellingen zijn:
- Robotic Industry Association (RIA): De vereniging die veiligheidsnormen voor industriële robots vaststelt.
- American National Standards Institute (ANSI): Een instituut dat normen voor veiligheid op de werkplek in de Verenigde Staten handhaaft.
- Internationale Organisatie voor Standaardisatie (ISO): Een organisatie die de internationale normen voor veiligheid op de werkplek onderhoudt.
- Occupational Safety and Health Administration (OSHA): De federale instantie die voorschriften voor veiligheid op de werkplek vaststelt en handhaaft.
Tot de soorten standaardisatie behoren onder meer het type mechanisme dat wordt gebruikt om een e-stop te activeren, de kleur van het mechanisme en de positionering van het mechanisme. Zo moeten noodstops bijvoorbeeld rood en geel gekleurd zijn, zodat ze goed zichtbaar zijn. Ze zouden met slechts één handeling geactiveerd moeten kunnen worden en ze zouden buiten het bereik van de robotarm geplaatst moeten worden, zodat werknemers niet het gevaar in hoeven te gaan om ze te activeren. Ze moeten bovendien op een plek worden geplaatst die gemakkelijk toegankelijk is voor de operators. Dit zijn slechts enkele van de normen die gelden om de veiligheid van werknemers te garanderen bij het gebruik van noodstops.

Andere veiligheidsmechanismen
Er worden nog veel meer apparaten gebruikt om de veiligheid van operators van industriële robots te waarborgen. Veiligheidsmechanismen worden vaak in combinatie met elkaar gebruikt. In echte industriële omgevingen worden verschillende veiligheidsvoorzieningen, -mechanismen en -voorzorgsmaatregelen gebruikt om de veiligheid van werknemers te garanderen, waaronder:
- Veiligheidsbarrières en -afschermingen: Fysieke barrières die robots scheiden van menselijke werknemers om onbedoeld contact te voorkomen. Voorbeelden hiervan zijn hekken, kooien en andere constructies die zijn ontworpen om de toegang tot gevaarlijke gebieden te beperken.
- Aanwezigheidssensoren: Sensoren die de aanwezigheid van mensen of objecten binnen een bepaald gebied detecteren. Deze kunnen de werking van de robot stilleggen als er een indringing wordt gedetecteerd.
- Sensorarmen: Robotarmen uitgerust met sensoren om contact met mensen of objecten te detecteren. Deze sensoren kunnen een uitschakeling activeren of de robot vertragen om letsel of schade te voorkomen.
- Drukmat: Matten op de vloer rondom de robot die druk of gewicht detecteren. Als iemand op de mat stapt, stopt de robot met werken om ongelukken te voorkomen.
- Alarmen: Hoorbare en visuele waarschuwingssystemen die werknemers waarschuwen voor de aanwezigheid van een actieve robot of een onveilige situatie. Deze alarmen kunnen door verschillende veiligheidssystemen of handmatig door operators worden geactiveerd.
- Lichtgordijnen: Reeksen lichtbundels die een onzichtbare barrière creëren rond gevaarlijke gebieden. Als een straal wordt onderbroken, wordt de robot onmiddellijk gestopt om de veiligheid van het personeel te garanderen.
De gecontroleerde stop op de CTE-werkcel
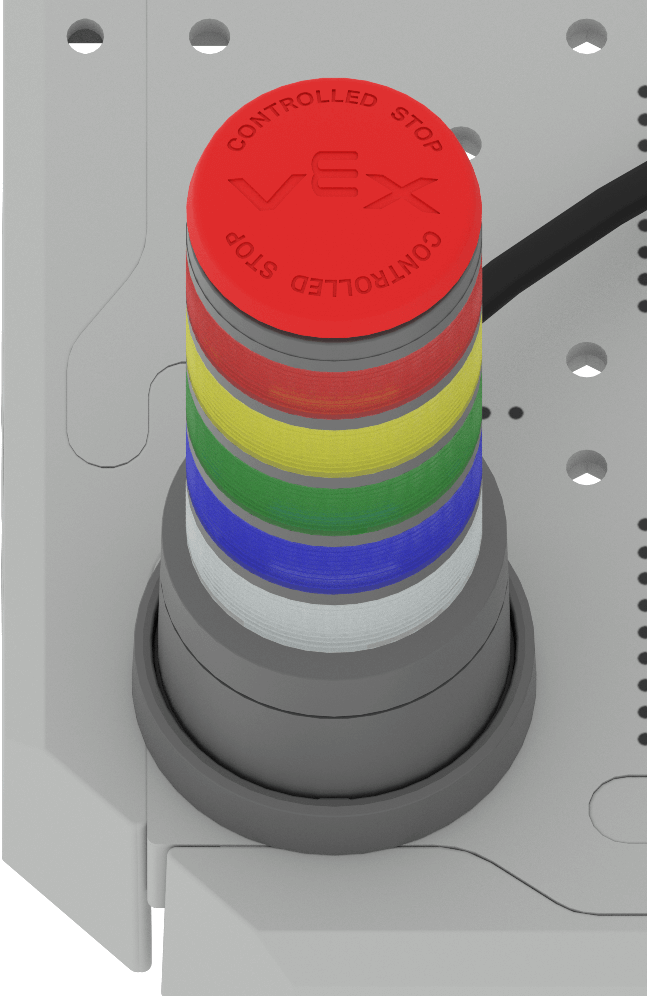
Op de CTE-werkcel bevindt zich een knop bovenop de signaaltoren waarmee, wanneer erop wordt gedrukt, een gecontroleerde stop kan worden geactiveerd.
U zult opmerken dat er op de knop 'Controlled Stop' staat. Wanneer de knop zo is gecodeerd dat deze als een gecontroleerde stop fungeert, kan deze worden ingedrukt als een onderdeel van de werkcel op een manier beweegt die schadelijk is voor het onderdeel of de gebruiker.
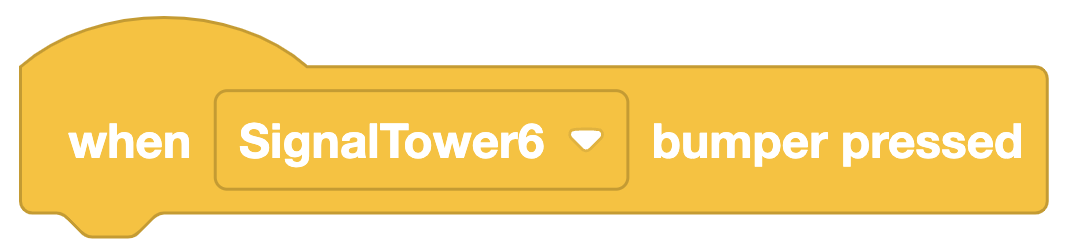
Het blokWanneer de signaaltorenbumper wordt ingedrukt?wordt gebruikt om de gecontroleerde stopfunctionaliteit te coderen.
Er is een stapel blokken in het Brain CTE 6-Axis Arm Template-project waarmee u gecontroleerd kunt stoppen. In de volgende les leert u meer over het coderen van de signaaltoren.
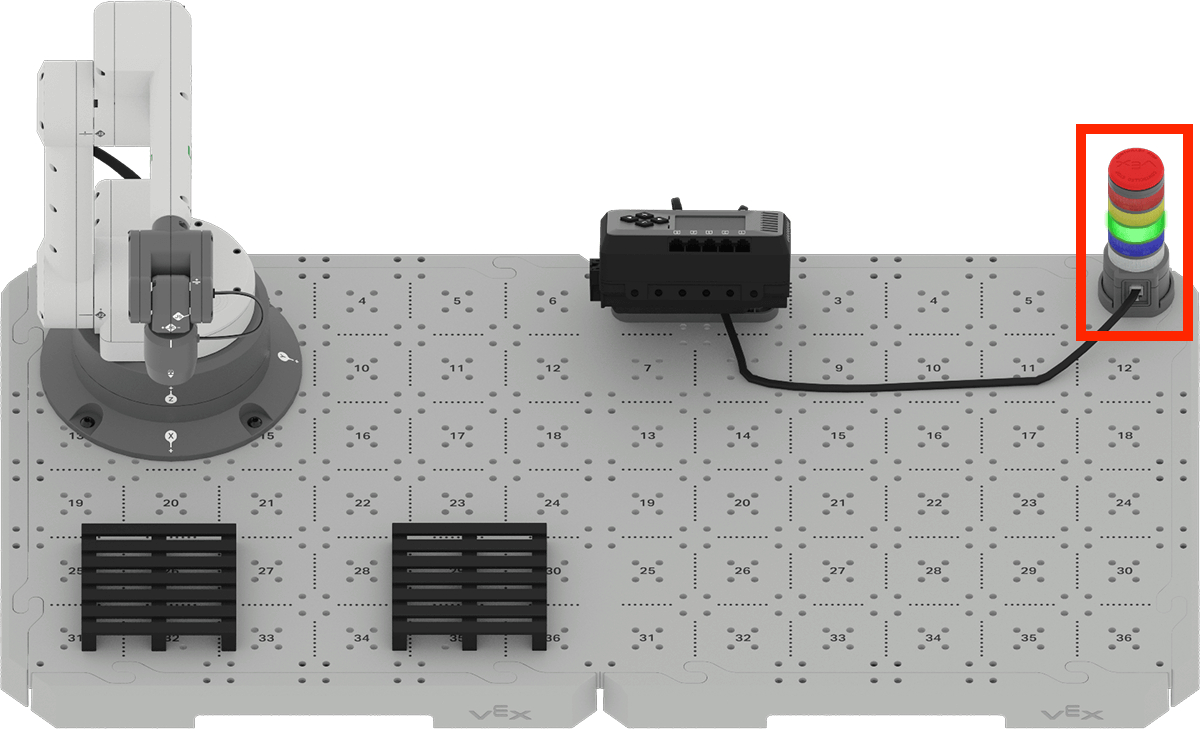
U zult merken dat de signaaltoren van uw bouwwerk zich buiten het bereik van de 6-assige arm bevindt, zodat u deze indien nodig eenvoudig en veilig kunt indrukken.
Controleer uw begrip
Voordat u doorgaat naar de volgende les, moet u ervoor zorgen dat u de concepten die in deze les zijn behandeld, begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen > (Google Doc / .docx / .pdf)
SelecteerVolgende >om naar de volgende les te gaan.