
يلعب
الجزء الأول - خطوة بخطوة
- تعليماتأرشد الطلاب إلى أنهم سوف يطبقون ما تعلموه في Engage، لجعل الروبوت الخاص بهم يدور
بزاوية 360 درجة باستخدام مكعبات [Spin for]. يوضح الرسم المتحرك أدناه كيفية تحرك الروبوت أثناء دورانه
بزاوية 360 درجة.
ملف الفيديو
- يعرف الطلاب المسافة التي يجب أن يقطعها الروبوت، والآن يحتاجون إلى حساب عدد دورات العجلة المطلوبة وإدخال هذا الرقم في مكعبات [Spin for]. إذا كان الحل صحيحًا، سيكمل الروبوت دورة 360 درجة .
- النموذجنموذج للطلاب حول كيفية اختبار حلولهم باستخدام قاعدة التعليمات البرمجية.
- ابدأ بإظهار للطلاب كيفية ربط الدماغ في قاعدة التعليمات البرمجية الخاصة بهم بجهازهم في VEXcode GO. لأن خطوات الاتصال تختلف بين الأجهزة، انظر قسم حول ربط المقالات في مكتبة VEXcode GO STEM للحصول على خطوات محددة لتوصيل VEX GO الدماغ لجهاز الكمبيوتر الخاص بك أو الكمبيوتر اللوحي.
- بمجرد الاتصال، سيتم فتح مشروع موكب تعويم مثال. للقيام بذلك، حدد "ملف" من شريط الأدوات، ثم "فتح
الأمثلة". بعد ذلك، اطلب من الطلاب اختيار مشروع "العوامة الاستعراضية" كمثال.
-
شاهد الفيديو أدناه لمعرفة كيفية فتح مشروع موكب تعويم مثال في VEXcode GO.
ملف الفيديو
-
-
بمجرد فتح مشروع المثال، سيحتاج الطلاب إلى تغيير اتجاه المحرك الأيمن إلى عكسي، عن طريق تحديد القائمة المنسدلة في كتلة [الدوران من أجل]. شاهد الفيديو أدناه لمعرفة كيفية تغيير المعلمة لجعل الروبوت يدور في هذا المشروع.
ملف الفيديو - اطلب من الطلاب تسمية مشروعهم بـ موكب تعويم بدوره وحفظه على أجهزتهم. انظر هذا قسم المقالات للخطوات الخاصة بالجهاز لحفظ مشروع VEXcode GO.
- عندما يكون الطلاب مستعدين معلمات كتل [الدوران من أجل].
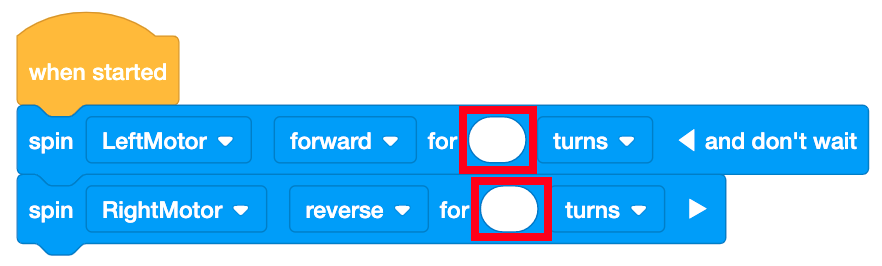
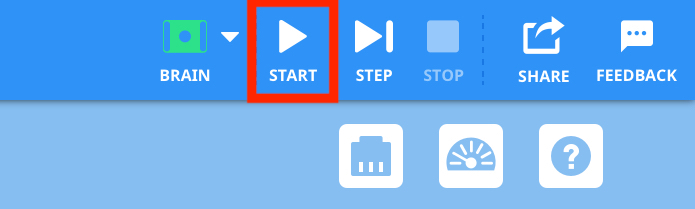
إدخال الحلول في المعلمات للاختبار - بمجرد أن يقوم الطلاب بإدخال حلولهم، "ابدأ" في VEXcode GO لاختبار المشروع.
حدد "ابدأ" لاختبار المشروع - سيتعين على الطلاب تحديد زر "إيقاف" في شريط أدوات VEXcode GO لإيقاف المشروع.
- خصص وقتًا للطلاب لاختبار مشاريعهم وإجراء التحديثات عليها، ثم اختبارها مرة أخرى إذا لزم الأمر.
- بالنسبة للطلاب الذين ينتهون مبكرًا ويحتاجون إلى تحديات إضافية، اطلب منهم العمل على حساب عدد دورات العجلة اللازمة لجعل الروبوت يدور بزاوية 180 درجة اطلب منهم اختبارها ومعرفة ما إذا كانت حساباتهم ناجحة.
- تسهيلقم بتسهيل المحادثة مع الطلاب أثناء عملهم على كيفية برمجة الروبوت لإجراء دورة 360
درجة من خلال أسئلة مثل:
- ماذا نحاول حسابه؟
- ما هي المسافة الإجمالية التي يجب أن يتحركها الروبوت لإكمال دورة 360 ؟ كيف حددنا هذا؟
- بمعرفة المسافة الكلية التي يجب أن يتحركها الروبوت ليدور 360 درجة ومعرفة المسافة التي يتحركها الروبوت بدوران عجلة واحدة، كيف يمكننا معرفة عدد الدورات التي يجب أن تقوم بها كل عجلة لجعل الروبوت بأكمله يدور 360 درجة؟
- ما هي المعلومات التي تقوم بإدخالها في الكتل [Spin for]؟ من أين جاء هذا الرقم؟
تسهيل استراتيجيات استكشاف الأخطاء وإصلاحها أثناء اختبار الطلاب لمشاريعهم. الطلاب قاعدة التعليمات البرمجية للتحقق من حلولهم، وعند القيام بذلك، سيتعين عليهم التأكد من أنهم قد حسبوا المقدار الصحيح الذي تحتاج العجلات إلى الدوران. وسوف يحتاجون أيضًا إلى التأكد من إدخال هذه المعلومات في كتل [Spin for] بشكل صحيح. اطرح الأسئلة وقدم الملاحظات أثناء عمل الطلاب، ولكن تجنب إعطاء الطلاب الإجابات أثناء تسهيل النشاط في هذا المختبر.
- هل القيمة الموجودة في الكتلة [Spin for] هي نفس الحل الخاص بك؟
- هل العدد العشري في المكان الصحيح؟
- هل القيم هي نفسها في كلا الكتلتين [Spin for]؟
إذا لم تدور قاعدة التعليمات البرمجية المسافة الصحيحة وكانت جميع المدخلات دقيقة، فهذا يعني أن حلها (عدد دورات العجلة المطلوبة) غير صحيح. أرشدهم إلى التحقق من حساباتهم أو تجربة طريقة مختلفة للعثور على هذه المسافة.
قد تكون هناك اختلافات في الحل بناءً على وحدات القياس المستخدمة، أو بسبب الاختلافات عند تقريب القياسات. وفيما يلي مثال على أحد الحلول.
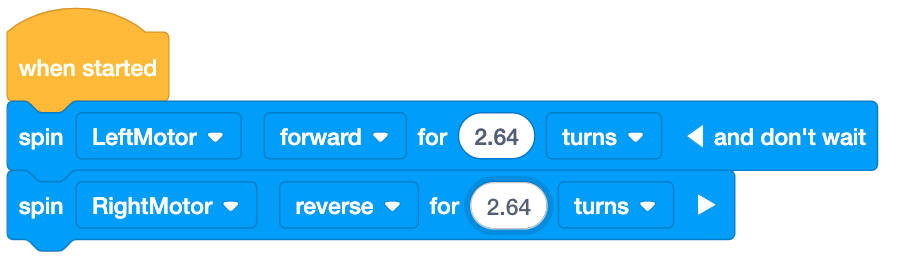
الحل الممكن - تذكيرذكّر الطلاب بأن الأمر قد يستغرق محاولات متعددة لإنجاح مشروعهم. تعتبر التجربة
والخطأ جزءًا من عملية الاختبار، ومؤشرًا مهمًا على مدى صحة حساباتهم.
- هل ذهب الروبوت الخاص بك بعيدا جدا؟ أم أنها ليست بعيدة بما فيه الكفاية؟ لماذا تعتقد أن ذلك حدث؟
- اسأل الطلابكيف يمكن أن يكون برمجة الروبوتات للتحرك بدقة مفيدًا في مجالات أخرى.
- ماذا لو كنت تقوم ببرمجة الروبوت الخاص بك للقيادة عبر متاهة؟ لماذا من المهم للروبوت أن يدور بدقة؟
مناقشة جماعية & استراحة منتصف اللعب
بمجرد أن يكون لدى كل مجموعة الوقت لحساب عدد دورات العجلة اللازمة لإجراء دورة 360 درجة واختبار حلولهم، يجتمعون معًا لإجراء محادثة قصيرة .
هذا هو الوقت المناسب للتحقق من الفهم وتصحيح أي مفاهيم خاطئة قد تكون لدى الطلاب قبل الانتقال إلى الجزء الثاني من اللعب. امنح مجموعات الطلاب الفرصة لمشاركة حلولهم وأساليبهم من خلال أسئلة مثل:
- مع العلم أن الروبوت يجب أن يدور 360 درجة، كيف حددت عدد دورات العجلة اللازمة؟
- هل يمكنك إظهار وشرح حسابك؟
الجزء الثاني - خطوة بخطوة
- الطلاب إلى أنهم سيطبقون ما تعلموه في الجزء الأول من اللعب لجعل الروبوت الخاص بهم يدور
بزاوية 180 درجة، بدلاً من الدوران بزاوية 360 درجة، باستخدام مكعبات [الدوران من أجل] لإكمال مسار العرض.
وسوف يستخدمون أيضًا حلولهم من المختبر 4 لجعل الروبوت يقود السيارة للأمام بالمسافة الصحيحة في مسار
العرض.
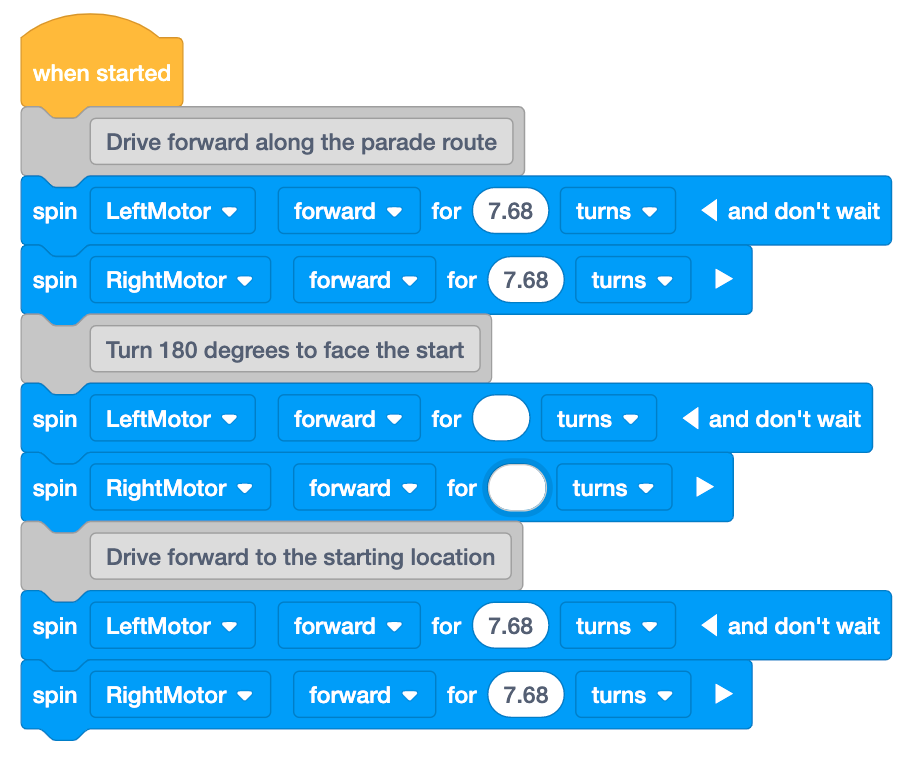
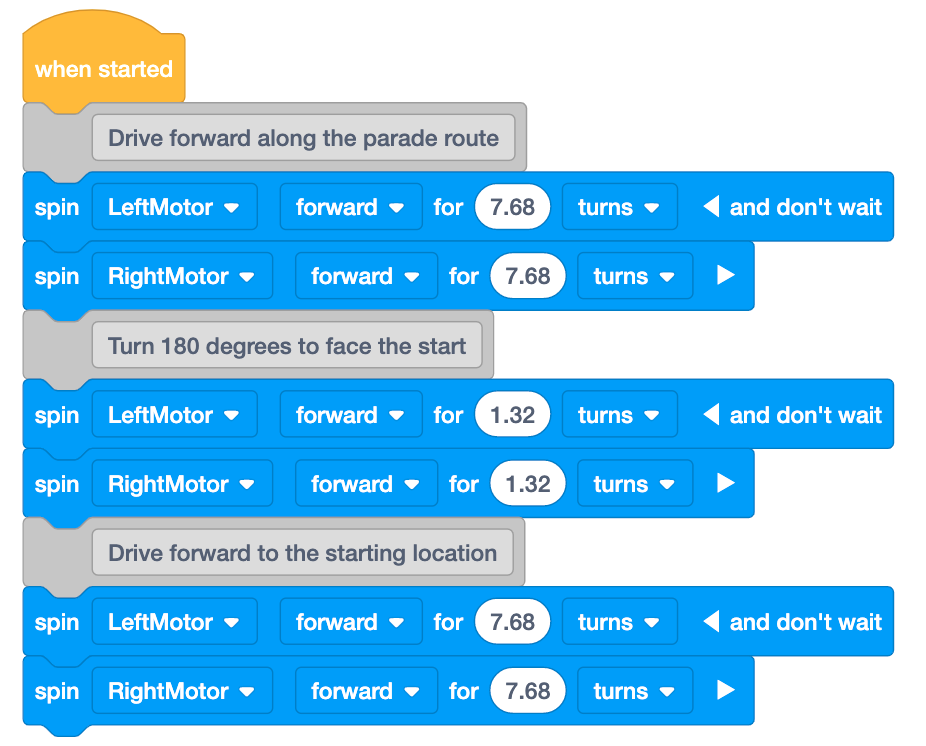
يوضح الرسم المتحرك أدناه كيف يجب أن يتحرك الروبوت أثناء إكماله لمسار العرض: القيادة للأمام لمسافة 48 بوصة (122 سم)، ثم الدوران 180 درجة، ثم القيادة للأمام لمسافة 48 بوصة (122 سم) للعودة إلى البداية. يتم استخدام قالب الكود أعلاه.
ملف الفيديو - نموذجنموذج للطلاب حول كيفية البدء في مشاريعهم في VEXcode GO.
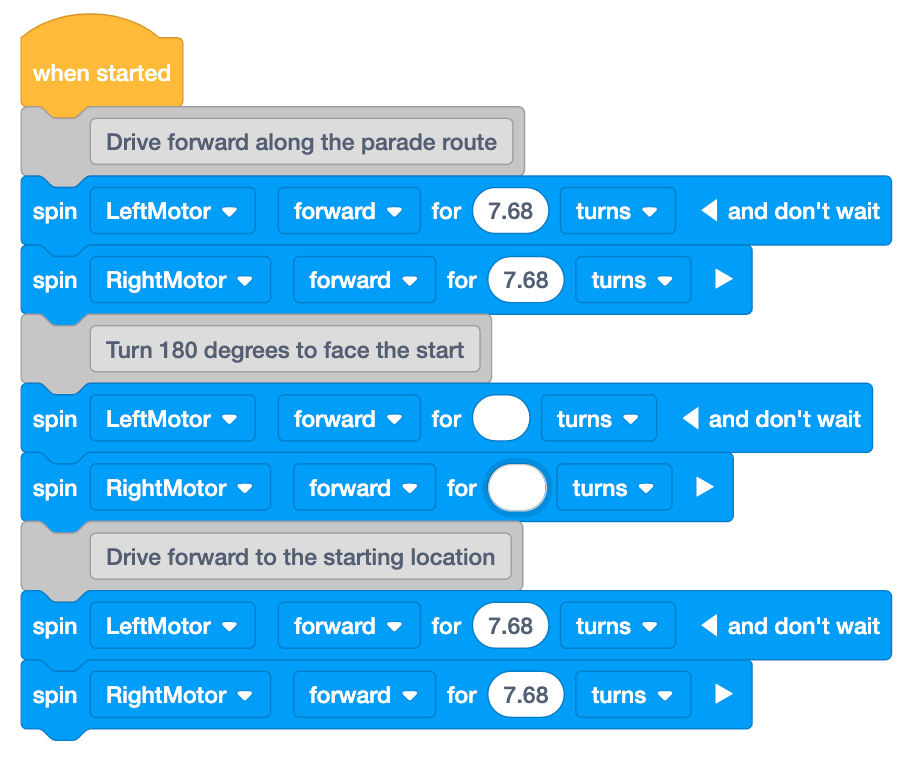
- ابدأ بجعل الطلاب يفتحون قالب مسار العرض.
- يرجى ملاحظة أن كتل [التعليق] مضمنة لوصف قسم من المشروع. إذا كنت تريد معرفة المزيد عن التعليقات في VEXcode GO, see this article.
- لاحظ أيضًا أن المجموعة الأولى والأخيرة من المعلمات تم ملؤها بقيم تستند إلى حلول من المختبر 4 لدفع الروبوت لمسافة 48 بوصة (122 سم)، وهو طول مسار العرض. قد تختلف هذه القيم قليلاً عن حلول الطلاب في المختبر 4 بسبب الاختلافات الطفيفة في تقريب القياسات.
قالب مسار العرض - سيتعين على الطلاب حساب عدد دورات العجلة اللازمة لإجراء دورة 180 درجة وإدخال هذه القيم في المميزتين.
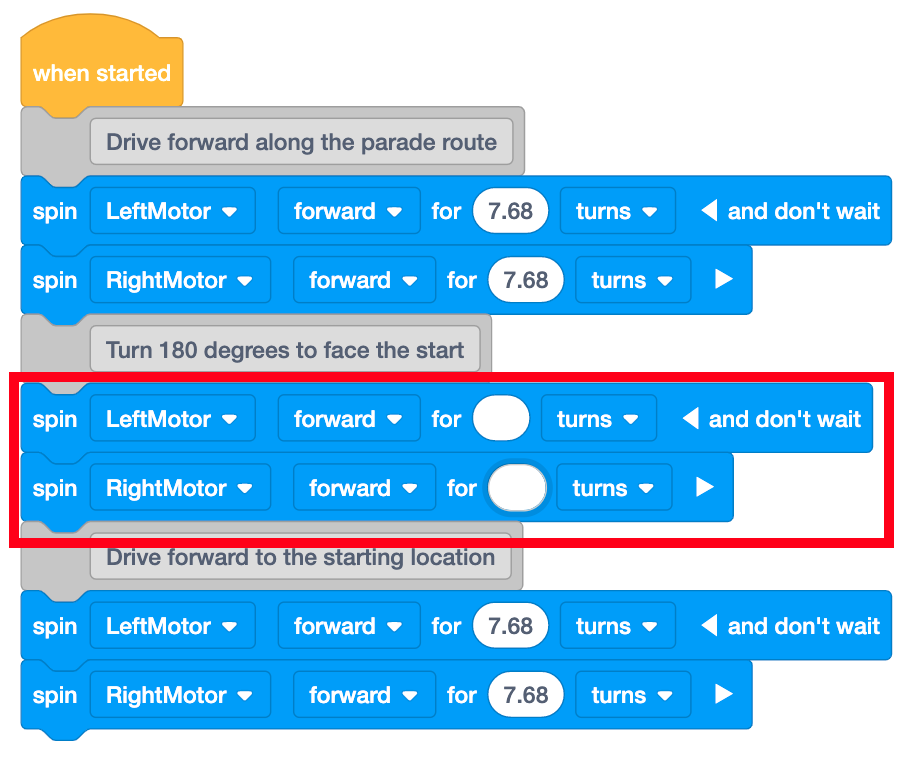
عدد دورات عجلة الإدخال اللازمة لإجراء الدوران بزاوية 180 درجة - بمجرد أن يقوم الطلاب بإدخال جميع القيم، يكونون مستعدين لحفظ مشروعهم واختبار الحل باستخدام الروبوت الخاص بهم.
- اطلب من الطلاب تسمية مشروعهم بـ Parade Float Lab 5 وحفظه على أجهزتهم. انظر هذا قسم المقالات للخطوات الخاصة بالجهاز لحفظ مشروع VEXcode GO.
نموذج للطلاب حول كيفية اختبار مشروعهم على مسار العرض.
- أولاً، أظهر لهم كيفية وضع الروبوت الخاص بهم في البداية عند كما هو موضح في الصورة أدناه. استخدم المباعدة الزرقاء الموجودة على العجلة للمساعدة في محاذاة مركز العجلة مع الحافة الأمامية لخط البداية.
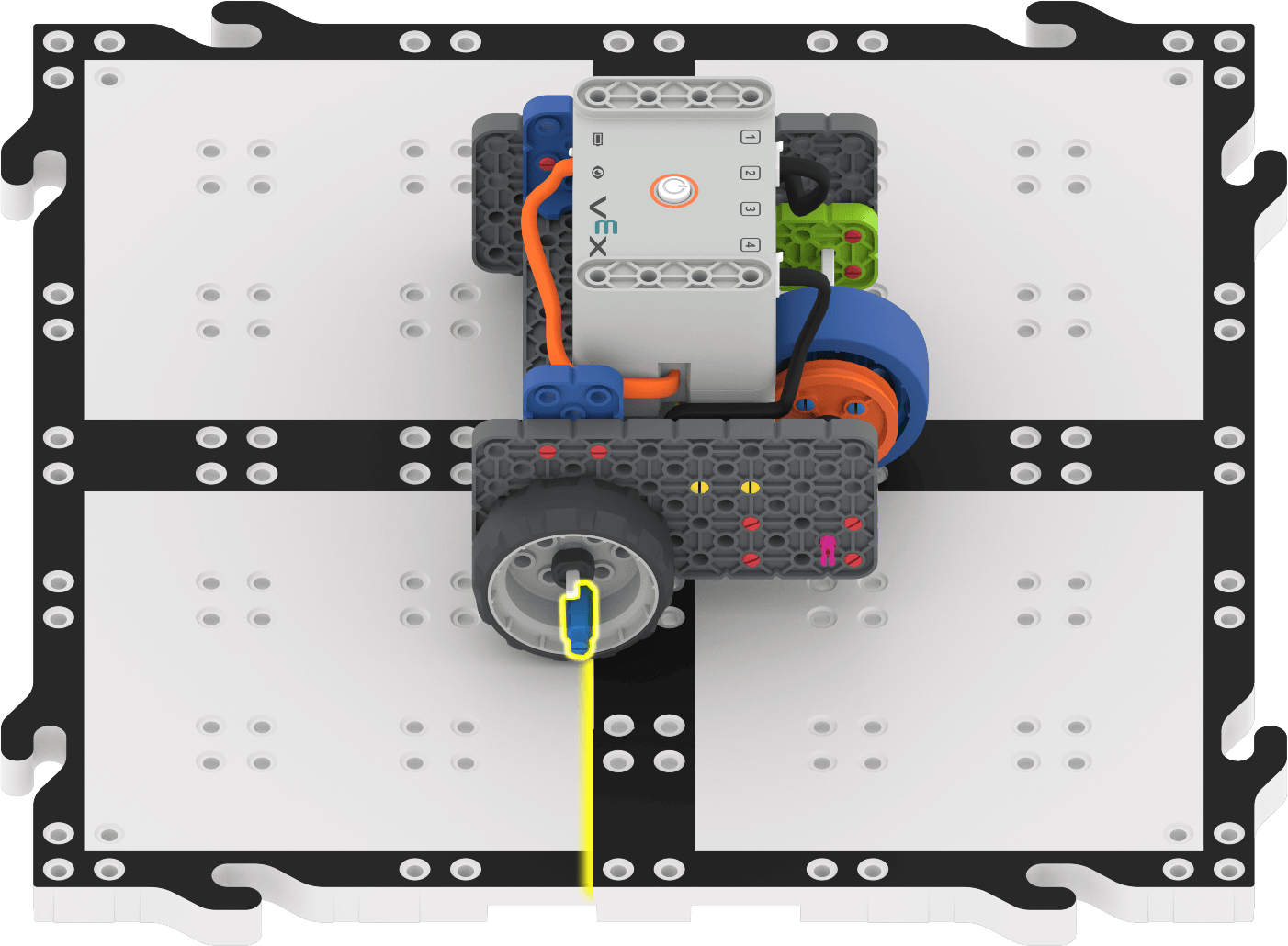
استخدم Blue Standoff للمساعدة في محاذاة محور العجلة والجزء الأمامي من خط البداية - بمجرد وضع قاعدة التعليمات البرمجية في مكانها، حدد "ابدأ" في VEXcode GO لاختبار المشروع.
حدد البدء لاختبار المشروع - سيتعين على الطلاب تحديد زر "إيقاف" في شريط أدوات VEXcode GO لإيقاف المشروع.
- خصص وقتًا للطلاب لاختبار مشاريعهم وإجراء التحديثات عليها، واختبارها مرة أخرى إذا لزم الأمر.
- بمجرد حصول الطلاب على فرصة لاختبار مشاريعهم على مسار العرض، اطلب منهم إضافة من مرفقات عوامات العرض الخاصة بهم إلى قاعدة التعليمات البرمجية والمشاركة في عرض للفصل بأكمله حيث تتناوب جميع المجموعات على تشغيل مشاريعها.
- بالنسبة للطلاب الذين ينتهون مبكرًا ويحتاجون إلى تحديات إضافية، اطلب منهم برمجة الروبوت الخاص بهم
لتدوير كمية مختلفة على مسار العرض. أعط الطلاب السيناريو التالي:
- ماذا لو كان المنعطف في مسار العرض 90 درجة؟ كيف ستتغير حساباتك؟ جربه وتأكد من نجاح عمليات الرياضيات الخاصة بك.
- لقد تم تمديد العرض! في نهاية مشروعك، يتعين عليك إجراء دوران بزاوية 90 درجة إلى اليسار لمواصلة مسار العرض. أضف كتلتين إضافيتين من [محرك الدوران] إلى أسفل مشروعك وقم بإجراء الحسابات.
- ابدأ بجعل الطلاب يفتحون قالب مسار العرض.
- تسهيلتسهيل المحادثة مع الطلاب أثناء قيامهم ببناء مشاريعهم واختبارها من خلال أسئلة مثل:
- ما الذي تحتاج إلى تغييره في حسابك من الجزء الأول من اللعبة حتى يدور الروبوت 180 درجة بدلاً من 360؟
- ما هي العلاقة بين هذين المنعطفين؟ كيف يؤثر ذلك على حساباتك؟
تسهيل استراتيجيات استكشاف الأخطاء وإصلاحها أثناء اختبار الطلاب لمشاريعهم. يستخدم الطلاب قاعدة التعليمات البرمجية للتحقق من حساباتهم، وسيتعين عليهم التأكد من أنهم حسبوا العدد الصحيح من المنعطفات اللازمة للقيادة إلى نهاية مسار العرض وإجراء الدوران 180 درجة، ثم إدخال هذه المعلومات في كتلة [Spin for] بشكل صحيح. اطرح الأسئلة وقدم الملاحظات أثناء عمل الطلاب، ولكن تجنب إعطاء الطلاب الإجابات أثناء تسهيل النشاط في هذا المختبر.
قد تكون هناك اختلافات في الحل بناءً على وحدات القياس المستخدمة، أو بسبب الاختلافات الطفيفة عند تقريب القياسات. وفيما يلي مثال على أحد الحلول.
حل محتمل للمختبر 5 - تذكيرذكّر الطلاب بأن الأمر قد يستغرق محاولات متعددة لجعل قاعدة التعليمات البرمجية
الخاصة بهم تقوم بالدوران كما هو مقصود. تعتبر المحاولات المتعددة جزءًا من عملية الاختبار ومؤشرًا مهمًا على
صحة حساباتهم. أثناء قيامهم بالعمل على مشاريع الرياضيات وVEXcode GO، اطرح عليهم الأسئلة التالية.
- إلى أي مدى تطورت قاعدة التعليمات البرمجية الخاصة بك عندما قمت بتشغيل مشروعك؟ هل كان هذا عددًا كبيرًا جدًا من الدورات، أم عددًا قليلًا جدًا من الدورات، أم كان كافيًا فقط
- إذا كانت قاعدة التعليمات البرمجية الخاصة بك أكثر أو أقل مما ينبغي، فما الذي يمكنك التحقق منه في حساباتك؟
- ما الذي يمكنك التحقق منه في مشروع VEXcode GO الخاص بك؟
- اسأل الطلاب: هل يمكن لمتغيرات مختلفة مثل أحجام العجلات أو مسافة الدوران أن تؤثر على
حساباتهم؟
- إذا كان لديك روبوت ذو عجلات أكبر، فكيف سيؤثر ذلك على العدد الإجمالي للدورات؟ لماذا تقول ذلك؟
- إذا كان لديك روبوت بعجلات أصغر حجمًا، فكيف سيؤثر ذلك على العدد الإجمالي للدورات؟ لماذا تقول ذلك؟