
Spielen
Teil 1 - Schritt für Schritt
- AnweisungenWeisen Sie die Schüler an, das in Engage Gelernte anzuwenden und ihren
Roboter mithilfe der Blöcke [Spin for] eine 360-Grad-Drehung ausführen zu lassen. Die folgende Animation
zeigt, wie sich der Roboter bei einer 360-Grad-Drehung bewegen sollte.
Videodatei
- Die Schüler kennen die Distanz, die der Roboter zurücklegen muss. Nun müssen sie die Anzahl der benötigten Radumdrehungen berechnen und diese Zahl in die Blöcke [Drehen für] eingeben. Wenn die Lösung richtig ist, führt der Roboter eine 360-Grad Drehung durch.
- ModellModell für Studenten, wie sie ihre Lösungen mit der Codebasis testen.
- Zeigen Sie den Schülern zunächst, wie sie das Brain auf ihrer Code Base mit ihrem Gerät in VEXcode GO verbinden. Da die Verbindungsschritte je nach Gerät unterschiedlich sind, siehe die Abschnitt zum Verbinden von Artikeln in der VEXcode GO STEM-Bibliothekfür spezifische Schritte zum Anschließen des VEX GO Brain auf Ihren Computer oder Ihr Tablet.
- Sobald die Verbindung hergestellt ist, öffnen sie das Parade Float-Beispielprojekt. Wählen Sie dazu
in der Symbolleiste „Datei“ und dann „Beispiele öffnen“. Lassen Sie die Schüler als Nächstes das
Beispielprojekt „Paradewagen“ auswählen.
-
Sehen Sie sich das Video unten an, um zu erfahren, wie Sie das Parade Float-Beispielprojekt in VEXcode GO öffnen.
Videodatei
-
-
Sobald das Beispielprojekt geöffnet ist, müssen die Schüler die Richtung des rechten Motors auf Rückwärts, ändern, indem sie das Dropdown-Menü im Block [Drehen für] auswählen. Sehen Sie sich das Video unten an, um zu erfahren, wie der Parameter geändert wird, damit der Roboter in diesem Projekt dreht.
Videodatei - Lassen Sie die Schüler ihr Projekt Parade Float Turn nennen und auf ihrem Gerät speichern. Sehen Sie sich das an Abschnitt der Artikel für gerätespezifische Schritte zum Speichern eines VEXcode GO-Projekts.
- Wenn sie bereit sind, geben die Schüler ihre Lösung in die Parameter der [Spin for]-Blöcke .
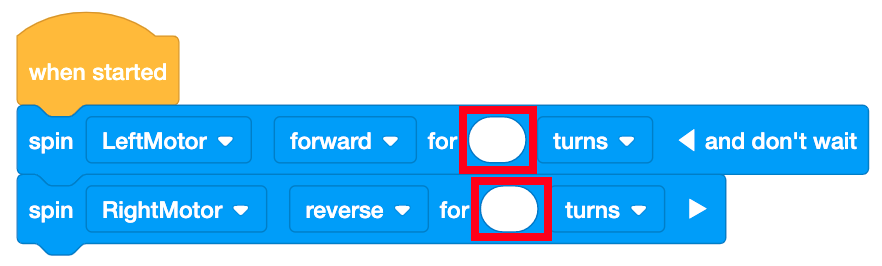
Lösungen in die zu testenden Parameter eingeben - Sobald die Schüler ihre Lösungen eingegeben haben, wählen in VEXcode GO „Start“, um das Projekt zu testen.
Wählen Sie „Start“, um Projekt zu testen- Um das Projekt zu stoppen, müssen die Studierenden die Schaltfläche „Stopp“ in der VEXcode GO-Symbolleiste auswählen.
- Geben Sie den Schülern Zeit, ihre Projekte zu testen und Aktualisierungen vorzunehmen. Führen Sie die Tests dann bei Bedarf erneut durch.
- Lassen Sie Schüler, die früher fertig sind und zusätzliche Herausforderungen brauchen, die Anzahl der Radumdrehungen berechnen, die nötig sind, damit der Roboter eine 180-Grad Wende macht. Lassen Sie sie das ausprobieren und sehen, ob ihre Rechnung aufgegangen ist.
- ModerierenModerieren Sie ein Gespräch mit den Schülern, während sie die Programmierung
des Roboters für die 360-Grad-Drehung durchgehen, und stellen Sie dabei Fragen wie:
- Was versuchen wir zu berechnen?
- Welche Gesamtdistanz muss der Roboter zurücklegen, um eine 360 -Drehung durchzuführen? Wie haben wir das festgestellt?
- Wenn wir die Gesamtstrecke kennen, die der Roboter für eine 360-Grad-Drehung zurücklegen muss, und wissen, wie weit der Roboter mit einer Raddrehung kommt, wie können wir dann herausfinden, wie viele Drehungen jedes Rad ausführen muss, damit sich der ganze Roboter um 360 Grad dreht?
- Welche Informationen geben Sie in die [Spin for]-Blöcke ein? Woher kommt diese Zahl?
Ermöglichen Sie Strategien zur Fehlerbehebung, während die Schüler ihre Projekte testen. Die Schüler die Codebasis verwenden, um ihre Lösungen zu überprüfen. Dabei müssen sie sicherstellen, dass sie den richtigen Betrag berechnet haben, um den sich die Räder drehen müssen. Sie müssen außerdem überprüfen, ob sie diese Informationen korrekt in die Blöcke [Spin for] eingegeben haben. Stellen Sie Fragen und geben Sie Feedback während der Arbeit der Schüler, aber vermeiden Sie es, den Schülern die Antworten zu geben, während Sie die Aktivität in diesem Labor leiten.
- Ist der Wert im Block [Spin for] derselbe wie Ihre Lösung?
- Steht das Komma an der richtigen Stelle?
- Sind die Werte in beiden [Spin for]-Blöcken gleich?
Wenn die Codebasis nicht die korrekte Distanz dreht und alle Eingaben genau sind, bedeutet dies, dass ihre Lösung (die Anzahl der benötigten Radumdrehungen) falsch ist. Fordern Sie sie auf, ihre Berechnungen zu überprüfen oder eine andere Methode zum Ermitteln dieser Entfernung auszuprobieren.
Aufgrund der verwendeten Maßeinheiten oder aufgrund von Abweichungen beim Runden von Maßangaben kann es zu Abweichungen von der Lösung kommen. Nachfolgend sehen Sie ein Lösungsbeispiel.
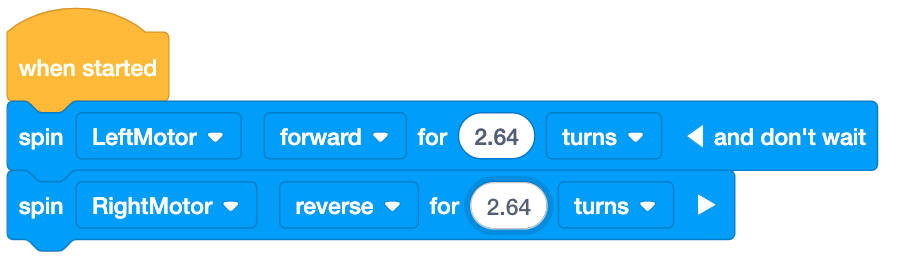
Mögliche Lösung - ErinnernErinnern Sie die Schüler daran, dass sie möglicherweise mehrere Versuche
brauchen, bis ihr Projekt funktioniert. Versuch und Irrtum sind Teil des Testprozesses und ein wichtiger
Indikator dafür, ob die Berechnungen richtig waren.
- Ist Ihr Roboter zu weit gegangen? Oder nicht weit genug? Warum ist das Ihrer Meinung nach passiert?
- FrageFragen Sie die Schüler, wie die Codierung von Robotern für präzise Bewegungen in
anderen Bereichen nützlich sein kann.
- Stellen Sie sich vor, Sie würden Ihren Roboter so programmieren, dass er durch ein Labyrinth fährt. Warum ist es für den Roboter wichtig, präzise zu wenden?
Spielpause & Gruppendiskussion
Sobald jede Gruppe Zeit hatte, die Anzahl der Radumdrehungen für eine 360-Grad-Wende zu berechnen und ihre Lösungenzu testen, kommen Sie zu einem kurzen Gespräch zusammen.
Jetzt ist es an der Zeit, das Verständnis der Schüler zu überprüfen und etwaige Missverständnisse zu korrigieren, bevor mit dem zweiten Teil des Spiels fortgefahren wird. Geben Sie den Schülergruppen die Möglichkeit, ihre Lösungen und Methoden mit Fragen wie diesen zu teilen:
- Wie haben Sie die Anzahl der erforderlichen Radumdrehungen ermittelt, da Sie wussten, dass sich der
Roboter um 360 Grad drehen musste?
- Können Sie Ihre Berechnung zeigen und erläutern?
Teil 2 - Schritt für Schritt
- UnterweisenWeisen Sie die Schüler an, das Gelernte aus Teil 1 des Spiels anzuwenden und
ihren Roboter mithilfe der Blöcke [Drehen für] eine 180-Grad-Wende statt einer 360-Grad-Wende machen zu
lassen, um eine Paraderoute zu absolvieren. Sie werden außerdem ihre Lösungen aus Labor 4 nutzen, um den
Roboter auf der Paradestrecke die richtige Distanz vorwärtsfahren zu lassen.
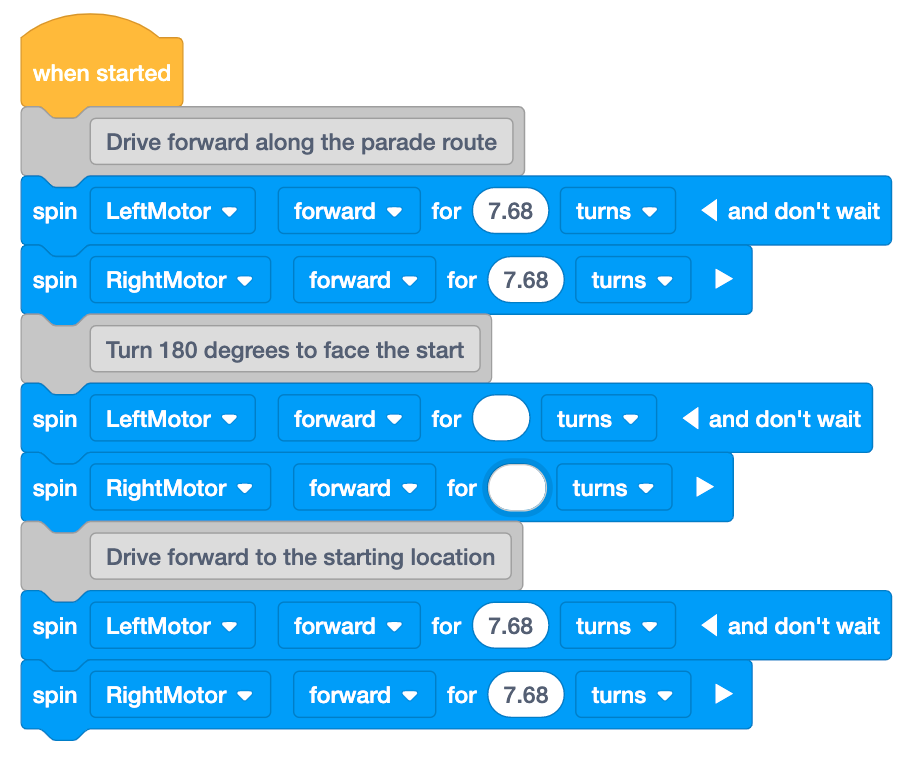
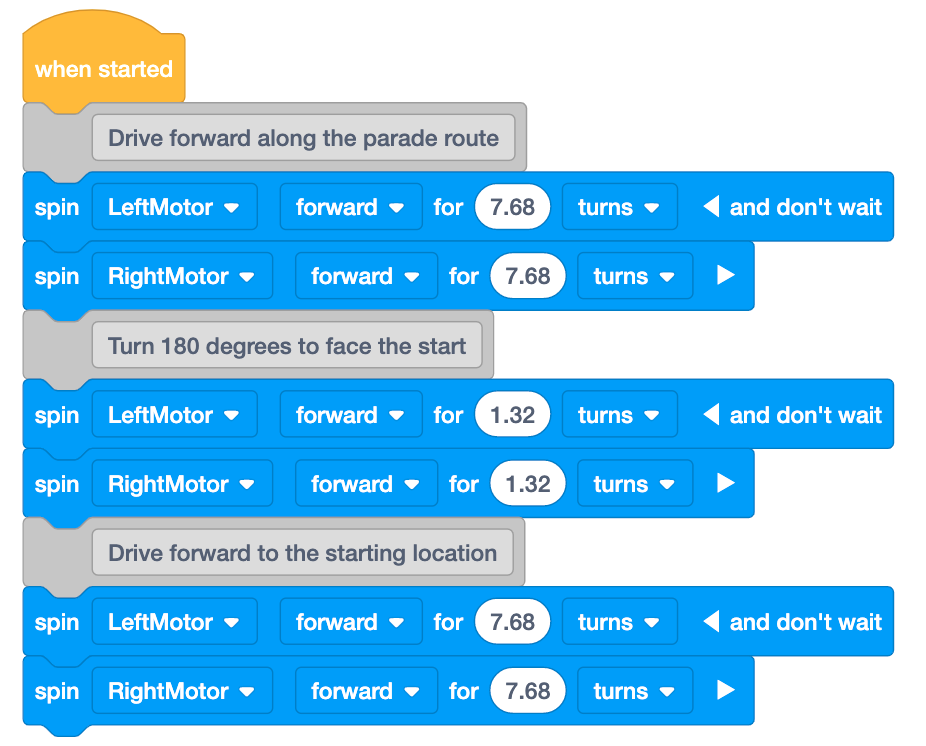
Die folgende Animation zeigt, wie sich der Roboter beim Absolvieren der Paradestrecke bewegen sollte: 48 Zoll (122 cm) vorwärts fahren, um 180 Grad drehen, dann 48 Zoll (122 cm) vorwärts fahren, um zum Start zurückzukehren. Hierbei wird die obige Codevorlage verwendet.
Videodatei - ModellModell für Studenten, wie sie mit ihren Projekten in VEXcode GO beginnen.
- Bitten Sie die Schüler zunächst, die Vorlage für die Paraderoute zu öffnen.
- Bitte beachten Sie, dass [Kommentar]-Blöcke enthalten sind um jeden Abschnitt des Projekts zu beschreiben. Wenn Sie mehr über Kommentare in VEXcode GO erfahren möchten, siehe diesen Artikel.
- Beachten Sie auch, dass der erste und letzte Parametersatz mit Werten auf Grundlage von Lösungen aus Übung 4 gefüllt wurden, um den Roboter 48 Zoll (122 cm), die Länge der Paradestrecke, zu fahren. Diese Werte können aufgrund kleiner Abweichungen bei den Rundungsmaßen leicht von den Lösungen der Schüler in Übung 4 abweichen.
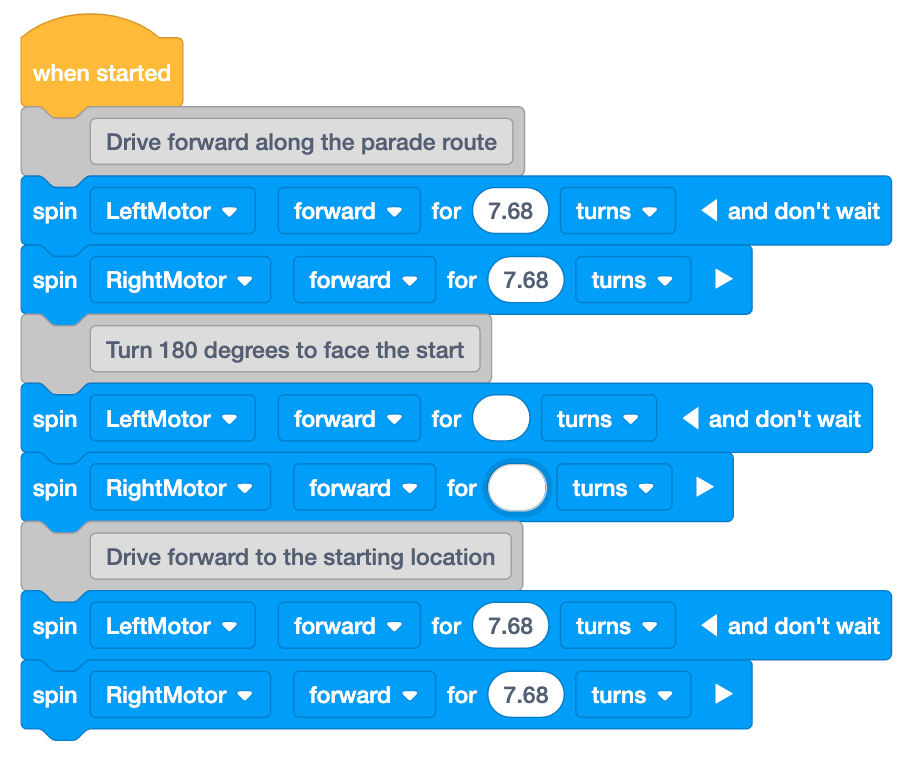
Paraderoutenvorlage - Die Schüler müssen die Anzahl der Radumdrehungen berechnen, für eine 180-Grad-Wende erforderlich sind, und diese Werte in die hervorgehobenen Blöcke eingeben.
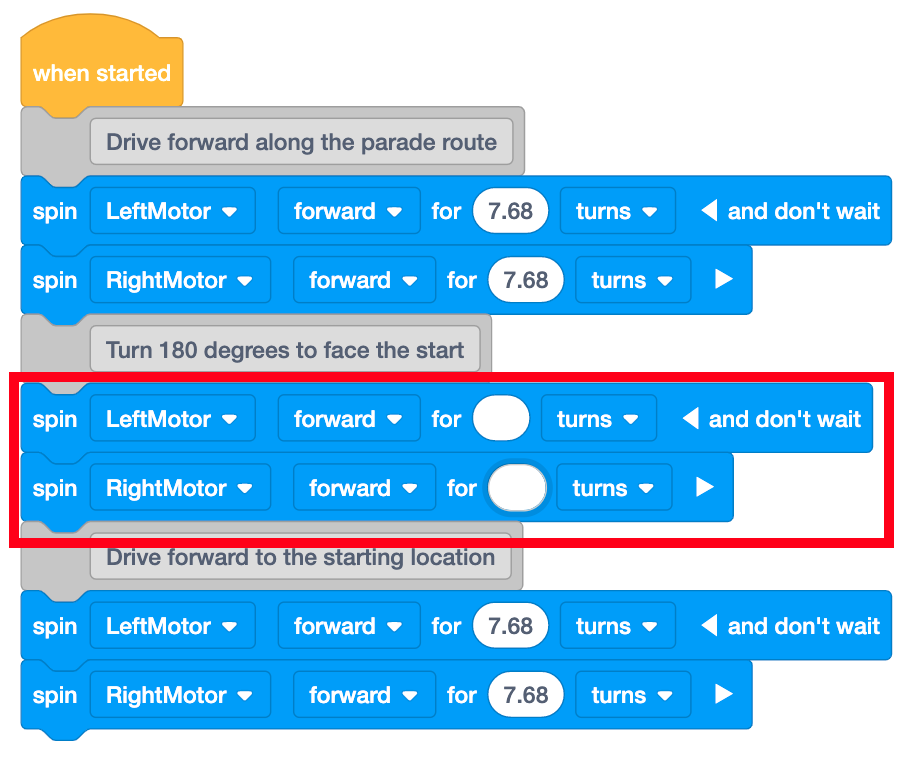
Geben Sie die Anzahl der Radumdrehungen ein, die für die 180-Grad-Wende erforderlich sind - Sobald die Schüler alle Werte eingegeben haben, können sie ihr Projekt speichern und ihre Lösung mit ihrem Roboter testen.
- Lassen Sie die Schüler ihr Projekt Parade Float Lab 5 nennen und auf ihrem Gerät speichern. In diesem Artikelabschnitt finden Sie gerätespezifische Schritte zum Speichern eines VEXcode GO Projekt.
Modell für Schüler, wie sie ihr Projekt auf der Paradestrecke testen können.
- Zeigen Sie ihnen zunächst, wie sie ihren Roboter am Startpunkt platzieren, wie in der Abbildung unten gezeigt. Verwenden Sie den blauen Abstandshalter am Rad, um die Mitte des Rads mit der Vorderkante der Startlinie auszurichten.
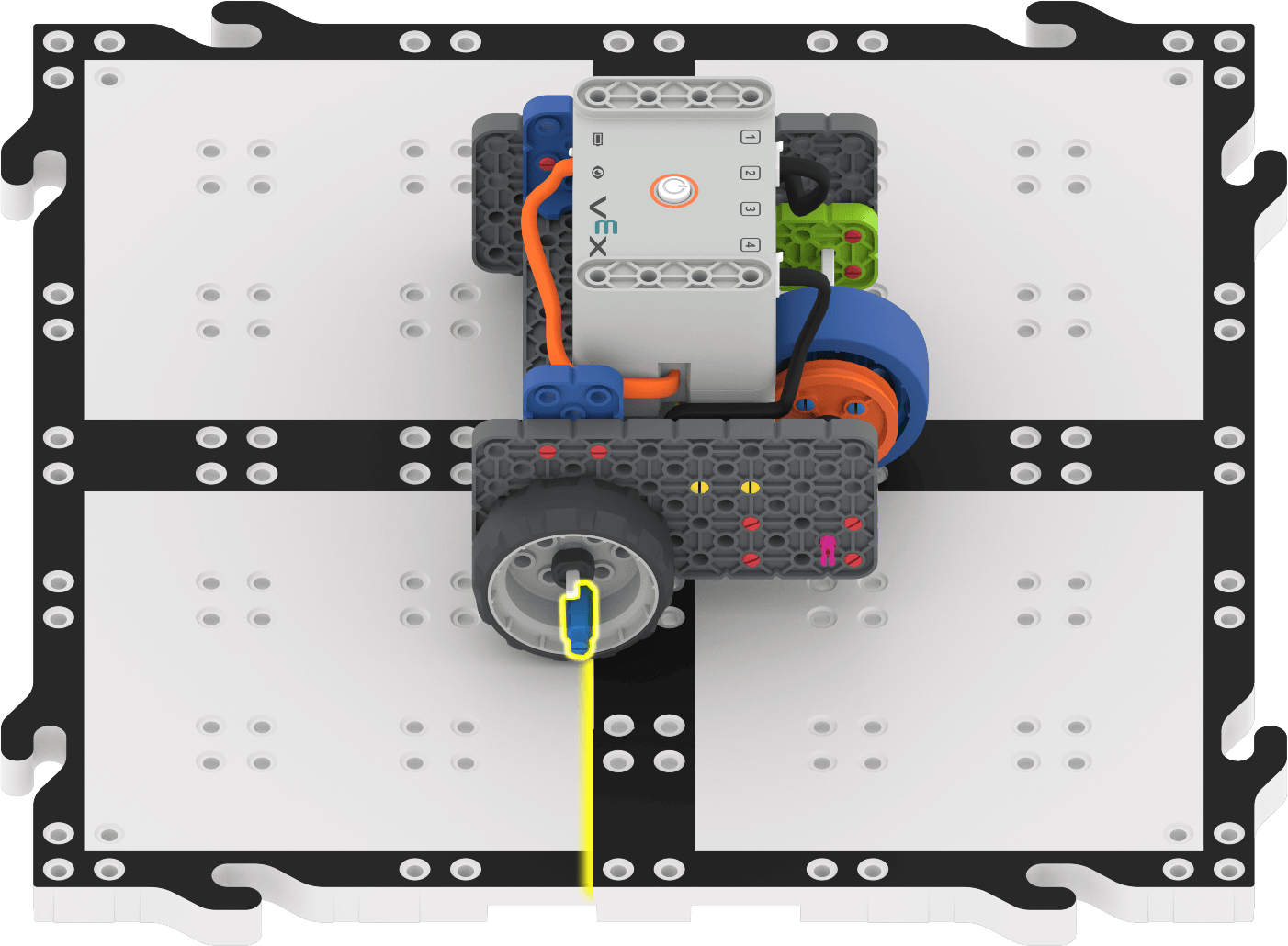
Verwenden Sie den blauen Abstandshalter, um die Radachse und die Vorderseite der Startlinie auszurichten - Sobald die Codebasis vorhanden ist, wählen Sie in VEXcode GO „Start“, um das Projekt zu testen.
Wählen Sie „Starten“, um Projekt zu testen- Um das Projekt zu stoppen, müssen die Studierenden die Schaltfläche „Stopp“ in der VEXcode GO-Symbolleiste auswählen.
- Geben Sie den Schülern Zeit, ihre Projekte zu testen, Aktualisierungen vorzunehmen und sie bei Bedarf erneut zu testen.
- Nachdem die Schüler die Möglichkeit hatten, ihre Projekte auf der Paradestrecke zu testen, lassen Sie sie ihre Paradewagenanhänge zur Codebasis und an Parade mit der ganzen Klasse teilnehmen, bei der alle Gruppen abwechselnd ihre Projekte vorführen.
- Lassen Sie die Schüler, die früher fertig sind und zusätzliche Herausforderungen brauchen, ihren
Roboter so programmieren, dass er auf der Paradestrecke einen anderen Winkel dreht. Geben Sie
den Schülern das folgende Szenario:
- Was wäre, wenn die Paradestrecke eine 90-Grad-Kurve hätte? Wie würden sich Ihre Berechnungen ändern? Testen Sie es und prüfen Sie, ob Ihre Berechnung aufgegangen ist.
- Die Parade wurde verlängert! Am Ende Ihres Projekts müssen Sie eine 90-Grad-Kurve nach links machen, um auf der Paraderoute weiterzufahren. Fügen Sie unten in Ihrem Projekt zwei zusätzliche [Spin-Motor]-Blöcke hinzu und führen Sie die Berechnungen durch.
- Bitten Sie die Schüler zunächst, die Vorlage für die Paraderoute zu öffnen.
- ModerierenModerieren Sie ein Gespräch mit den Schülern, während sie ihre Projekte
erstellen und testen, mit Fragen wie:
- Was müssen Sie in Ihrer Berechnung aus Spielteil 1 ändern, damit sich der Roboter um 180 Grad statt um 360 Grad dreht?
- Welche Beziehung besteht zwischen diesen beiden Wendungen? Welchen Einfluss hat das auf Ihre Berechnungen?
Ermöglichen Sie Strategien zur Fehlerbehebung, während die Schüler ihre Projekte testen. Die Schüler überprüfen ihre Berechnungen mithilfe der Codebasis und müssen sicherstellen, dass sie die richtige Anzahl an Kurven berechnet haben, die erforderlich sind, um sowohl bis zum Ende der Paradestrecke zu fahren als auch die 180-Grad-Wende zu schaffen. Anschließend müssen sie diese Informationen korrekt in den Block [Drehen für] eingeben. Stellen Sie Fragen und geben Sie Feedback, während die Schüler arbeiten, aber geben Sie den Schülern nicht die Antworten, während Sie die Aktivität in diesem Labor leiten.
Aufgrund der verwendeten Maßeinheiten oder geringfügiger Abweichungen beim Runden von Maßangaben kann es zu Abweichungen von der Lösung kommen. Nachfolgend sehen Sie ein Beispiel für eine Lösung.
Mögliche Labor 5 Lösung - ErinnernErinnern Sie die Schüler daran, dass sie möglicherweise mehrere Versuche
brauchen, bis ihre Codebasis die gewünschte Wendung durchführt. Mehrere Versuche sind Teil des
Testprozesses und ein wichtiger Indikator dafür, ob die Berechnung richtig war. Stellen Sie ihnen die
folgenden Fragen, während sie ihre Mathematik- und VEXcode GO-Projekte durchgehen und daran arbeiten.
- Wie weit hat sich Ihre Codebasis entwickelt, als Sie Ihr Projekt ausgeführt haben? Waren das zu viele Umdrehungen, zu wenige Umdrehungen oder gerade genug?
- Wenn sich Ihre Codebasis zu stark oder zu wenig gedreht hat, was können Sie in Ihren Berechnungen überprüfen?
- Was können Sie in Ihrem VEXcode GO-Projekt überprüfen?
- FrageBitten Sie die Schüler, darüber nachzudenken, welche verschiedenen Variablen wie
Radgröße oder Wendedistanz ihre Berechnungen beeinflussen könnten.
- Wenn Sie einen Roboter mit größeren Rädern hätten, welche Auswirkungen würde das auf die Gesamtzahl der Umdrehungen haben? Warum sagst du das?
- Wenn Sie einen Roboter mit kleineren Rädern hätten, welche Auswirkungen würde das auf die Gesamtzahl der Umdrehungen haben? Warum sagst du das?