
കളിക്കുക
ഭാഗം 1 - ഘട്ടം ഘട്ടമായി
- നിർദ്ദേശം[സ്പിൻ ഫോർ] ബ്ലോക്കുകൾ ഉപയോഗിച്ച് റോബോട്ട് 360 ഡിഗ്രി ടേൺ ഉണ്ടാക്കുന്നതിനായി, എൻഗേജിൽ പഠിച്ച കാര്യങ്ങൾ പ്രയോഗിക്കുമെന്ന് വിദ്യാർത്ഥികളെ നിർദ്ദേശിക്കുക. താഴെയുള്ള ആനിമേഷൻ റോബോട്ട് 360 ഡിഗ്രി തിരിയുമ്പോൾ എങ്ങനെ നീങ്ങണമെന്ന് കാണിക്കുന്നു. ആനിമേഷനിൽ റോബോട്ട് ഘടികാരദിശയിൽ തിരിയുമ്പോൾ ഭ്രമണ ഡിഗ്രി 360 ആയി കണക്കാക്കുന്നു.
വീഡിയോ ഫയൽ
- റോബോട്ട് സഞ്ചരിക്കേണ്ട ദൂരം വിദ്യാർത്ഥികൾക്ക് അറിയാം, ഇനി അവർ ആവശ്യമായ ചക്ര തിരിവുകളുടെ എണ്ണം കണക്കാക്കി ആ നമ്പർ [സ്പിൻ ഫോർ] ബ്ലോക്കുകളിൽ നൽകേണ്ടതുണ്ട്. പരിഹാരം ശരിയാണെങ്കിൽ, റോബോട്ട് 360 ഡിഗ്രി ഭ്രമണം പൂർത്തിയാക്കും.
- മോഡൽകോഡ് ബേസ് ഉപയോഗിച്ച് അവരുടെ പരിഹാരങ്ങൾ എങ്ങനെ പരീക്ഷിക്കാമെന്ന് വിദ്യാർത്ഥികൾക്കുള്ള മാതൃക.
- വിദ്യാർത്ഥികൾക്ക് അവരുടെ കോഡ് ബേസിലെ ബ്രെയിൻ VEXcode GO-യിലെ ഉപകരണവുമായി എങ്ങനെ ബന്ധിപ്പിക്കാമെന്ന് കാണിച്ചുകൊടുത്തുകൊണ്ട് ആരംഭിക്കുക. ഉപകരണങ്ങൾക്കിടയിൽ കണക്ഷൻ ഘട്ടങ്ങൾ വ്യത്യാസപ്പെടുന്നതിനാൽ, VEX GO ബ്രെയിൻ നിങ്ങളുടെ കമ്പ്യൂട്ടറിലേക്കോ ടാബ്ലെറ്റിലേക്കോ ബന്ധിപ്പിക്കുന്നതിനുള്ള നിർദ്ദിഷ്ട ഘട്ടങ്ങൾക്ക് VEXcode GO STEM ലൈബ്രറി ലെ കണക്റ്റിംഗ് ലേഖനങ്ങൾ വിഭാഗം കാണുക.
- ബന്ധിപ്പിച്ചുകഴിഞ്ഞാൽ, അവർ പരേഡ് ഫ്ലോട്ട് ഉദാഹരണ പദ്ധതി തുറക്കും. അങ്ങനെ ചെയ്യുന്നതിന്, ടൂൾബാറിൽ നിന്ന് 'ഫയൽ' തിരഞ്ഞെടുക്കുക, തുടർന്ന് 'ഉദാഹരണങ്ങൾ തുറക്കുക' തിരഞ്ഞെടുക്കുക. അടുത്തതായി, വിദ്യാർത്ഥികളെ 'പരേഡ് ഫ്ലോട്ട്' ഉദാഹരണ പ്രോജക്റ്റ് തിരഞ്ഞെടുക്കാൻ അനുവദിക്കുക.

-
VEXcode GO-യിൽ പരേഡ് ഫ്ലോട്ട് ഉദാഹരണ പ്രോജക്റ്റ് എങ്ങനെ തുറക്കാമെന്ന് കാണാൻ താഴെയുള്ള വീഡിയോ കാണുക. GO ടൂൾബാറിലെ ഫയൽ മെനു തുറക്കുകയും ഡ്രോപ്പ്ഡൗണിൽ നിന്ന് 'ഉദാഹരണങ്ങൾ തുറക്കുക' എന്ന് കാണുന്ന നാലാമത്തെ ഇനം ക്ലിക്ക് ചെയ്യുകയും ചെയ്യുന്നു. GO Example Projects മെനു തുറക്കുകയും പരേഡ് ഫ്ലോട്ട് പ്രോജക്റ്റ് തിരഞ്ഞെടുത്ത് ലോഡ് ചെയ്യുകയും ചെയ്യുന്നു.
വീഡിയോ ഫയൽ
-
-
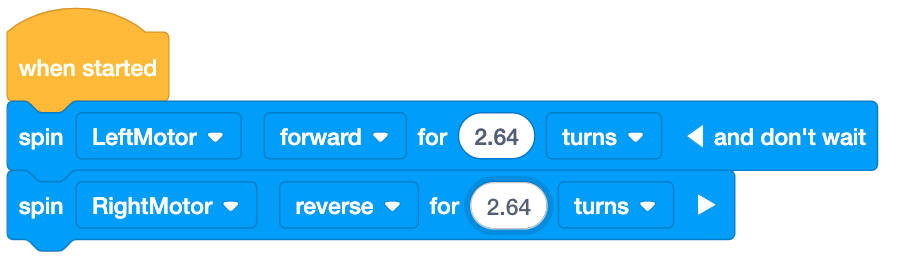
ഉദാഹരണ പ്രോജക്റ്റ് തുറന്നുകഴിഞ്ഞാൽ, [സ്പിൻ ഫോർ] ബ്ലോക്കിലെ ഡ്രോപ്പ്ഡൗൺ തിരഞ്ഞെടുത്ത് വിദ്യാർത്ഥികൾ വലത് മോട്ടോറിന്റെ ദിശറിവേഴ്സ്,ആക്കി മാറ്റേണ്ടതുണ്ട്. ഈ പ്രോജക്റ്റിൽ റോബോട്ട് തിരിയുന്നതിനായി പാരാമീറ്റർ എങ്ങനെ മാറ്റാമെന്ന് കാണാൻ താഴെയുള്ള വീഡിയോ കാണുക. രണ്ടാമത്തെ [Spin for] ബ്ലോക്കിലെ ദിശ ഡ്രോപ്പ്ഡൗൺ അതിൽ ക്ലിക്ക് ചെയ്യുമ്പോൾ തുറക്കും, ദിശ 'മുന്നോട്ട്' എന്നതിൽ നിന്ന് 'റിവേഴ്സ്' എന്നതിലേക്ക് മാറ്റും.
വീഡിയോ ഫയൽ - വിദ്യാർത്ഥികളോട് അവരുടെ പ്രോജക്റ്റിന് പരേഡ് ഫ്ലോട്ട് ടേൺ എന്ന് പേരിടുകയും അത് അവരുടെ ഉപകരണത്തിൽ സേവ് ചെയ്യുകയും ചെയ്യുക. ഒരു VEXcode GO പ്രോജക്റ്റ്സംരക്ഷിക്കുന്നതിനുള്ള ഉപകരണ-നിർദ്ദിഷ്ട ഘട്ടങ്ങൾക്കായി ലേഖനങ്ങളുടെ ഈ വിഭാഗം കാണുക.
- അവർ തയ്യാറാകുമ്പോൾ, വിദ്യാർത്ഥികൾ അവരുടെ പരിഹാരം [സ്പിൻ ഫോർ] ബ്ലോക്കുകളുടെ പാരാമീറ്ററുകളിൽ ഉൾപ്പെടുത്തും.
 ടെസ്റ്റ്ലേക്കുള്ള പാരാമീറ്ററുകളിലേക്ക്
ടെസ്റ്റ്ലേക്കുള്ള പാരാമീറ്ററുകളിലേക്ക് ഇൻപുട്ട് സൊല്യൂഷനുകൾ - വിദ്യാർത്ഥികൾ അവരുടെ പരിഹാരങ്ങൾ നൽകിക്കഴിഞ്ഞാൽ, പ്രോജക്റ്റ് പരീക്ഷിക്കാൻ VEXcode GO-യിൽ 'ആരംഭിക്കുക' തിരഞ്ഞെടുക്കുക.

പ്രോജക്റ്റ് പരീക്ഷിക്കാൻ 'ആരംഭിക്കുക' തിരഞ്ഞെടുക്കുക- പ്രോജക്റ്റ് നിർത്താൻ വിദ്യാർത്ഥികൾ VEXcode GO ടൂൾബാറിലെ 'Stop' ബട്ടൺ തിരഞ്ഞെടുക്കേണ്ടതുണ്ട്.
- വിദ്യാർത്ഥികൾക്ക് അവരുടെ പ്രോജക്ടുകൾ പരീക്ഷിക്കാനും അപ്ഡേറ്റുകൾ വരുത്താനും സമയം അനുവദിക്കുക, ആവശ്യമെങ്കിൽ വീണ്ടും പരീക്ഷിക്കുക.
- നേരത്തെ പൂർത്തിയാക്കുകയും കൂടുതൽ വെല്ലുവിളികൾ ആവശ്യമുള്ളതുമായ വിദ്യാർത്ഥികൾക്ക്, റോബോട്ട് 180 ഡിഗ്രി തിരിവ് വരുത്തുന്നതിന് ആവശ്യമായ ചക്രങ്ങളുടെ എണ്ണം കണക്കാക്കാൻ അവരെ പ്രേരിപ്പിക്കുക. അവരുടെ ഗണിതം വിജയിച്ചോ എന്ന് പരീക്ഷിച്ചു നോക്കട്ടെ.
- സൗകര്യമൊരുക്കുക360 ടേൺ ഉണ്ടാക്കുന്നതിനായി റോബോട്ടിനെ എങ്ങനെ കോഡ് ചെയ്യാമെന്ന് പഠിക്കുമ്പോൾ, ഇനിപ്പറയുന്നതുപോലുള്ള ചോദ്യങ്ങൾ ചോദിച്ചുകൊണ്ട് വിദ്യാർത്ഥികളുമായി ഒരു സംഭാഷണം സൗകര്യമൊരുക്കുക:
- നമ്മൾ എന്താണ് കണക്കാക്കാൻ ശ്രമിക്കുന്നത്?
- 360 ടേൺ ചെയ്യാൻ റോബോട്ട് സഞ്ചരിക്കേണ്ട ആകെ ദൂരം എത്രയാണ്? ഞങ്ങൾ ഇത് എങ്ങനെ നിർണ്ണയിച്ചു?
- 360 ഡിഗ്രി തിരിയാൻ റോബോട്ട് എത്ര ദൂരം സഞ്ചരിക്കണമെന്ന് അറിയുകയും, ഒരു ചക്രം തിരിയുമ്പോൾ റോബോട്ട് എത്ര ദൂരം സഞ്ചരിക്കണമെന്ന് അറിയുകയും ചെയ്താൽ, മുഴുവൻ റോബോട്ടും 360 ഡിഗ്രി തിരിയാൻ ഓരോ ചക്രത്തിനും എത്ര ദൂരം തിരിയണമെന്ന് നമുക്ക് എങ്ങനെ കണ്ടെത്താനാകും?
- [സ്പിൻ ഫോർ] ബ്ലോക്കുകളിലേക്ക് നിങ്ങൾ എന്ത് വിവരമാണ് നൽകുന്നത്? ഈ നമ്പർ എവിടെ നിന്നാണ് വന്നത്?
വിദ്യാർത്ഥികൾ അവരുടെ പ്രോജക്ടുകൾ പരീക്ഷിക്കുമ്പോൾ പ്രശ്നപരിഹാര തന്ത്രങ്ങൾ സുഗമമാക്കുക. വിദ്യാർത്ഥികൾ അവരുടെ പരിഹാരങ്ങൾ പരിശോധിക്കാൻ കോഡ് ബേസ് ഉപയോഗിക്കുന്നു, അങ്ങനെ ചെയ്യുമ്പോൾ, ചക്രങ്ങൾ തിരിയേണ്ട ശരിയായ അളവ് അവർ കണക്കാക്കിയിട്ടുണ്ടെന്ന് അവർ ഉറപ്പാക്കേണ്ടതുണ്ട്. [Spin for] ബ്ലോക്കുകളിലേക്ക് ആ വിവരങ്ങൾ ശരിയായി നൽകുന്നുണ്ടോ എന്നും അവർ പരിശോധിക്കേണ്ടതുണ്ട്. വിദ്യാർത്ഥികൾ ജോലി ചെയ്യുമ്പോൾ ചോദ്യങ്ങൾ ചോദിക്കുകയും ഫീഡ്ബാക്ക് നൽകുകയും ചെയ്യുക, എന്നാൽ ഈ ലാബിലെ പ്രവർത്തനം സുഗമമാക്കുമ്പോൾ വിദ്യാർത്ഥികൾക്ക് ഉത്തരങ്ങൾ നൽകുന്നത് ഒഴിവാക്കുക.
- [Spin for] ബ്ലോക്കിലെ മൂല്യം നിങ്ങളുടെ പരിഹാരത്തിന് തുല്യമാണോ?
- ദശാംശം ശരിയായ സ്ഥലത്താണോ?
- രണ്ട് [സ്പിൻ ഫോർ] ബ്ലോക്കുകളിലും മൂല്യങ്ങൾ ഒന്നുതന്നെയാണോ?
കോഡ് ബേസ് ശരിയായ ദൂരം തിരിക്കുന്നില്ലെങ്കിൽ, എല്ലാ ഇൻപുട്ടുകളും കൃത്യമാണെങ്കിൽ, അവയുടെ പരിഹാരം (ആവശ്യമായ വീൽ തിരിവുകളുടെ എണ്ണം) തെറ്റാണെന്നാണ് ഇതിനർത്ഥം. അവരുടെ കണക്കുകൂട്ടലുകൾ പരിശോധിക്കാൻ അവരെ നയിക്കുക അല്ലെങ്കിൽ ഈ ദൂരം കണ്ടെത്തുന്നതിന് മറ്റൊരു രീതി പരീക്ഷിക്കുക.
ഉപയോഗിക്കുന്ന അളവെടുപ്പ് യൂണിറ്റുകളെ അടിസ്ഥാനമാക്കിയോ അല്ലെങ്കിൽ അളവുകൾ റൗണ്ട് ചെയ്യുമ്പോഴുള്ള വ്യതിയാനങ്ങൾ മൂലമോ പരിഹാരത്തിൽ വ്യത്യാസങ്ങൾ ഉണ്ടാകാം. ഒരു പരിഹാരത്തിനുള്ള ഒരു ഉദാഹരണമാണ് താഴെ കൊടുത്തിരിക്കുന്നത്.
സാധ്യമായ പരിഹാരം - ഓർമ്മിപ്പിക്കുകവിദ്യാർത്ഥികളുടെ പ്രോജക്റ്റ് പ്രാവർത്തികമാക്കാൻ ഒന്നിലധികം ശ്രമങ്ങൾ വേണ്ടിവന്നേക്കാമെന്ന് ഓർമ്മിപ്പിക്കുക. പരീക്ഷണ പ്രക്രിയയുടെ ഒരു ഭാഗമാണ് പരീക്ഷണവും പിഴവും, അവരുടെ കണക്ക് ശരിയായിരുന്നോ എന്നതിന്റെ ഒരു പ്രധാന സൂചകവുമാണ്.
- നിങ്ങളുടെ റോബോട്ട് വളരെ ദൂരം പോയോ? അതോ പോരായോ? എന്തുകൊണ്ടാണ് അങ്ങനെ സംഭവിച്ചതെന്ന് നിങ്ങൾ കരുതുന്നു?
- ചോദിക്കുകകൃത്യതയോടെ ചലിക്കുന്നതിനായി റോബോട്ടുകളെ കോഡ് ചെയ്യുന്നത് മറ്റ് മേഖലകളിൽ എങ്ങനെ ഉപയോഗപ്രദമാകുമെന്ന് വിദ്യാർത്ഥികളോട് ചോദിക്കുക.
- നിങ്ങളുടെ റോബോട്ടിനെ ഒരു മസിലിലൂടെ ഓടിക്കാൻ കോഡ് ചെയ്യുകയാണെങ്കിൽ എന്തുചെയ്യും. റോബോട്ട് കൃത്യമായി തിരിയേണ്ടത് പ്രധാനമായിരിക്കുന്നത് എന്തുകൊണ്ട്?
പ്ലേ ഇടവേള & ഗ്രൂപ്പ് ചർച്ച
ഓരോ ഗ്രൂപ്പ് 360 ഡിഗ്രി തിരിവ് നടത്താൻ ആവശ്യമായ ചക്ര തിരിവുകളുടെ എണ്ണം കണക്കാക്കാനും അവയുടെ പരിഹാരങ്ങൾപരീക്ഷിക്കാനും സമയം ലഭിച്ചുകഴിഞ്ഞാൽ, ഹ്രസ്വ സംഭാഷണത്തിനായി ഒത്തുചേരുക.
പ്ലേ പാർട്ട് 2 ലേക്ക് കടക്കുന്നതിന് മുമ്പ് വിദ്യാർത്ഥികൾക്ക് ഉണ്ടായേക്കാവുന്ന തെറ്റിദ്ധാരണകൾ മനസ്സിലാക്കാനും തിരുത്താനുമുള്ള സമയമാണിത്. വിദ്യാർത്ഥി ഗ്രൂപ്പുകൾക്ക് അവരുടെ പരിഹാരങ്ങളും രീതികളും ഇതുപോലുള്ള ചോദ്യങ്ങളുടെ സഹായത്തോടെ പങ്കിടാൻ അവസരം നൽകുക:
- റോബോട്ട് 360 ഡിഗ്രി തിരിയണമെന്ന് അറിയാമായിരുന്നിട്ടും, എത്ര ചക്രം തിരിയണമെന്ന് നിങ്ങൾ എങ്ങനെയാണ് നിർണ്ണയിച്ചത്?
- നിങ്ങളുടെ കണക്കുകൂട്ടൽ കാണിച്ചുതരാമോ?
ഭാഗം 2 - ഘട്ടം ഘട്ടമായി
- നിർദ്ദേശംപരേഡ് റൂട്ട് പൂർത്തിയാക്കുന്നതിന് [സ്പിൻ ഫോർ] ബ്ലോക്കുകൾ ഉപയോഗിച്ച്, 360 ഡിഗ്രി ടേണിന് പകരം 180 ഡിഗ്രി ടേൺ ഉണ്ടാക്കാൻ, പ്ലേ പാർട്ട് 1 ൽ പഠിച്ച കാര്യങ്ങൾ പ്രയോഗിക്കുമെന്ന് വിദ്യാർത്ഥികളെ നിർദ്ദേശിക്കുക. പരേഡ് റൂട്ടിൽ റോബോട്ട് ശരിയായ ദൂരം മുന്നോട്ട് കൊണ്ടുപോകുന്നതിന് അവർ ലാബ് 4 ൽ നിന്നുള്ള പരിഹാരങ്ങൾ ഉപയോഗിക്കും.
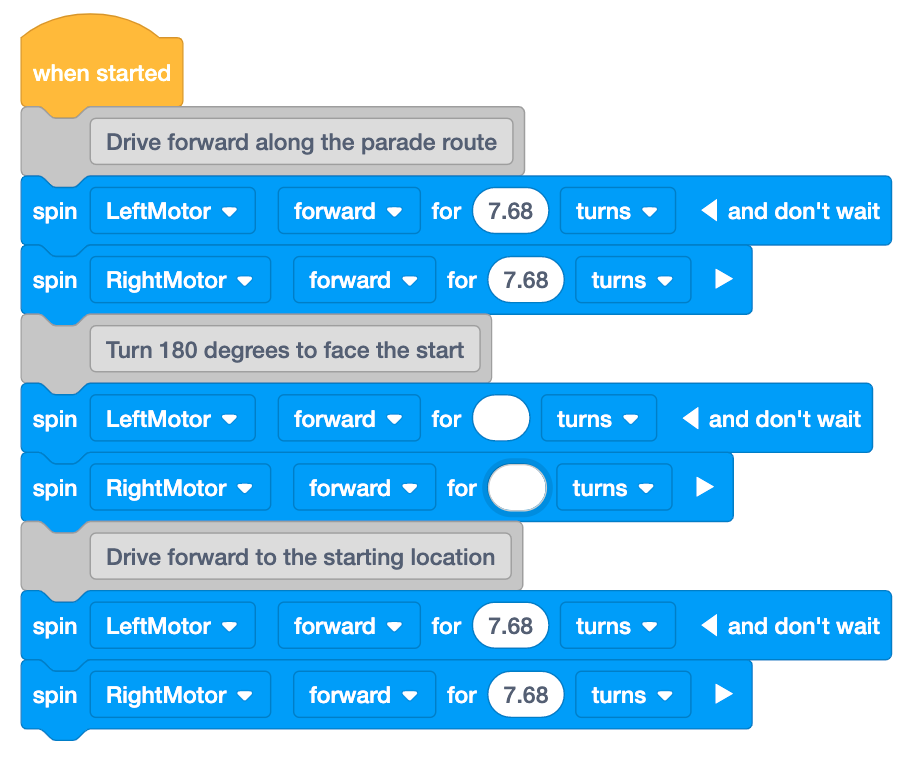
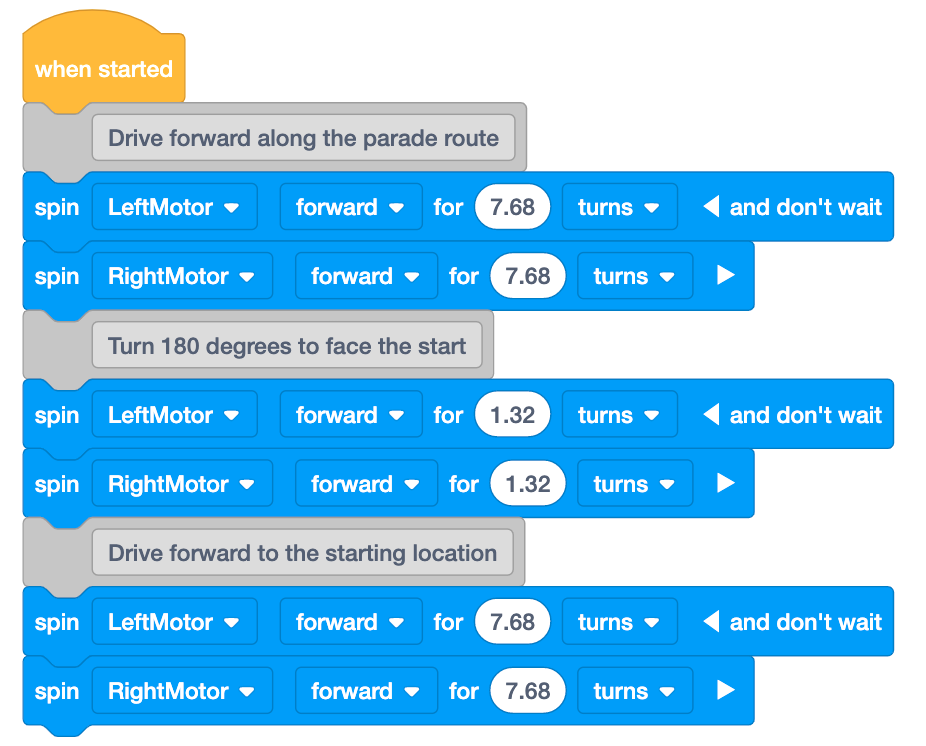
പരേഡ് റൂട്ട് പൂർത്തിയാക്കുമ്പോൾ റോബോട്ട് എങ്ങനെ നീങ്ങണമെന്ന് താഴെയുള്ള ആനിമേഷൻ കാണിക്കുന്നു: 48 ഇഞ്ച് (122 സെ.മീ) മുന്നോട്ട് ഓടിക്കുക, 180 ഡിഗ്രി തിരിക്കുക, തുടർന്ന് 48 ഇഞ്ച് (122 സെ.മീ) മുന്നോട്ട് ഓടിച്ച് തുടക്കത്തിലേക്ക് മടങ്ങുക. ഇത് മുകളിലുള്ള കോഡ് ടെംപ്ലേറ്റ് ഉപയോഗിക്കുന്നു. ആനിമേഷനിൽ കോഡ് ബേസ് ബന്ധിപ്പിച്ചിരിക്കുന്ന അഞ്ച് ടൈലുകൾക്ക് മുകളിലൂടെ നേരെ ഡ്രൈവ് ചെയ്യുന്നു, അവസാനം എത്തുമ്പോൾ അത് 180 വലത്തേക്ക് തിരിഞ്ഞ് തുടക്കത്തിലേക്ക് തിരികെ ഡ്രൈവ് ചെയ്യുന്നു.
വീഡിയോ ഫയൽ - മോഡൽVEXcode GO-യിൽ അവരുടെ പ്രോജക്റ്റുകൾ എങ്ങനെ ആരംഭിക്കാമെന്ന് വിദ്യാർത്ഥികൾക്കുള്ള മാതൃക.
- വിദ്യാർത്ഥികളെ പരേഡ് റൂട്ട് ടെംപ്ലേറ്റ് തുറക്കാൻ പറഞ്ഞുകൊണ്ട് ആരംഭിക്കുക.
- പ്രോജക്റ്റിന്റെ ഓരോ വിഭാഗത്തെയും വിവരിക്കുന്നതിന് [അഭിപ്രായം] ബ്ലോക്കുകൾ ഉൾപ്പെടുത്തിയിട്ടുണ്ടെന്ന് ദയവായി ശ്രദ്ധിക്കുക. VEXcode GO-യിലെ കമന്റുകളെക്കുറിച്ച് കൂടുതലറിയാൻ, ഈ ലേഖനം കാണുക.
- പരേഡ് റൂട്ടിന്റെ നീളമായ 48 ഇഞ്ച് (122 സെന്റീമീറ്റർ) റോബോട്ടിനെ ഓടിക്കുന്നതിനുള്ള ലാബ് 4 ലെ പരിഹാരങ്ങളെ അടിസ്ഥാനമാക്കിയുള്ള മൂല്യങ്ങൾ ആദ്യത്തേയും അവസാനത്തേയും പാരാമീറ്ററുകളിൽ ഉൾപ്പെടുത്തിയിട്ടുണ്ട് എന്നതും ശ്രദ്ധിക്കുക. റൗണ്ടിംഗ് അളവുകളിലെ നേരിയ വ്യത്യാസങ്ങൾ കാരണം ഈ മൂല്യങ്ങൾ ലാബ് 4 ലെ വിദ്യാർത്ഥി പരിഹാരങ്ങളിൽ നിന്ന് അല്പം വ്യത്യാസപ്പെട്ടിരിക്കാം.
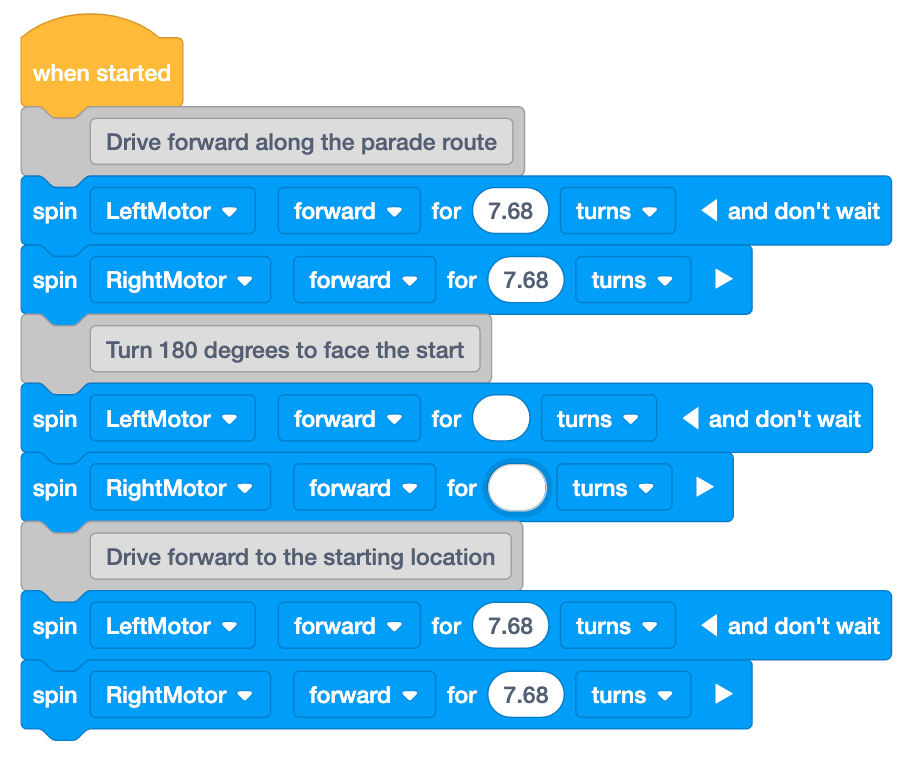
പരേഡ് റൂട്ട് ടെംപ്ലേറ്റ് - വിദ്യാർത്ഥികൾ 180 ഡിഗ്രി തിരിവിന് ആവശ്യമായ ചക്ര തിരിവുകളുടെ എണ്ണം കണക്കാക്കുകയും ആ മൂല്യങ്ങൾ ഹൈലൈറ്റ് ചെയ്ത ബ്ലോക്കുകളിൽ നൽകുകയും വേണം.
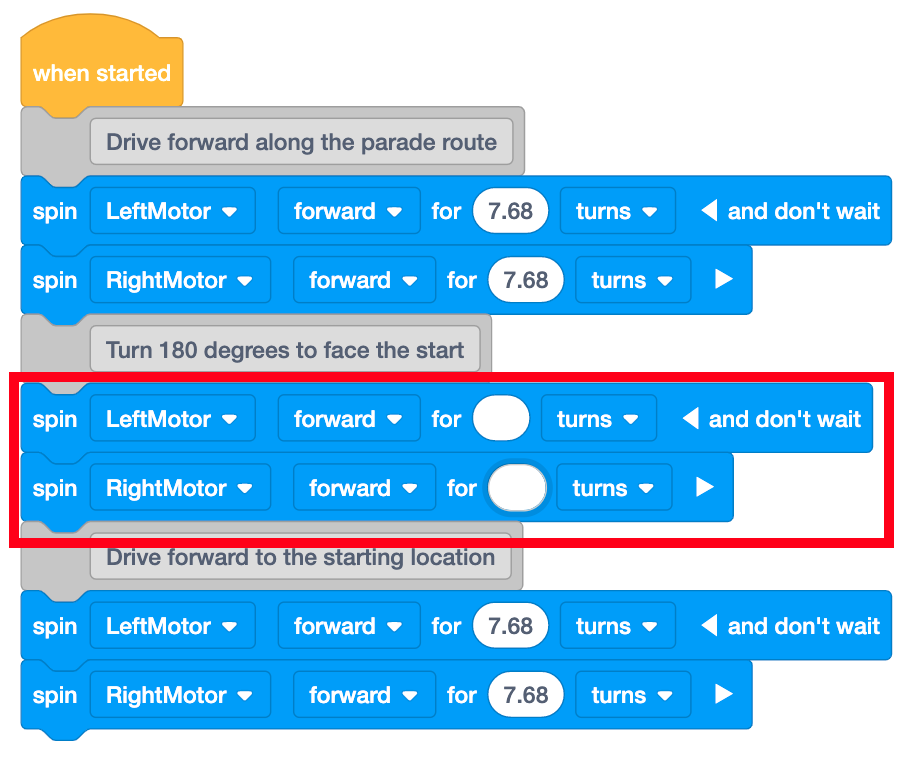 180 ഡിഗ്രി ടേൺആക്കാൻ
180 ഡിഗ്രി ടേൺആക്കാൻ വീൽ ടേണുകൾ ആവശ്യമാണ്. - വിദ്യാർത്ഥികൾ എല്ലാ മൂല്യങ്ങളും നൽകിക്കഴിഞ്ഞാൽ, അവർ അവരുടെ പ്രോജക്റ്റ് സേവ് ചെയ്യാനും റോബോട്ട് ഉപയോഗിച്ച് അവരുടെ പരിഹാരം പരീക്ഷിക്കാനും തയ്യാറാകും.
- വിദ്യാർത്ഥികളോട് അവരുടെ പ്രോജക്റ്റിന് പരേഡ് ഫ്ലോട്ട് ലാബ് 5എന്ന് പേരിടുകയും അത് അവരുടെ ഉപകരണത്തിൽ സേവ് ചെയ്യുകയും ചെയ്യുക. ഒരു VEXcode GO പ്രോജക്റ്റ്സംരക്ഷിക്കുന്നതിനുള്ള ഉപകരണ-നിർദ്ദിഷ്ട ഘട്ടങ്ങൾക്കായി ലേഖനങ്ങളുടെ ഈ വിഭാഗം കാണുക.
പരേഡ് റൂട്ടിൽ വിദ്യാർത്ഥികൾക്ക് അവരുടെ പ്രോജക്റ്റ് എങ്ങനെ പരീക്ഷിക്കാമെന്ന് മാതൃക.
- ആദ്യം, താഴെയുള്ള ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, റോബോട്ട് തുടക്കത്തിൽ എങ്ങനെ സ്ഥാപിക്കാമെന്ന് അവരെ കാണിക്കുക. ചക്രത്തിന്റെ മധ്യഭാഗം സ്റ്റാർട്ടിംഗ് ലൈനിന്റെ മുൻവശത്തെ അരികുമായി വിന്യസിക്കാൻ സഹായിക്കുന്നതിന് വീലിലെ ബ്ലൂ സ്റ്റാൻഡ്ഓഫ് ഉപയോഗിക്കുക.

വീൽ ആക്സിലും സ്റ്റാർട്ടിംഗ് ലൈനിന്റെ മുൻഭാഗവും വിന്യസിക്കാൻ സഹായിക്കുന്നതിന് ബ്ലൂ സ്റ്റാൻഡ്ഓഫ് ഉപയോഗിക്കുക - കോഡ് ബേസ് സ്ഥാപിച്ചുകഴിഞ്ഞാൽ, പ്രോജക്റ്റ് പരീക്ഷിക്കാൻ VEXcode GO-യിൽ 'ആരംഭിക്കുക' തിരഞ്ഞെടുക്കുക.

പ്രോജക്റ്റ് പരീക്ഷിക്കാൻ ആരംഭിക്കുക തിരഞ്ഞെടുക്കുക- പ്രോജക്റ്റ് നിർത്താൻ വിദ്യാർത്ഥികൾ VEXcode GO ടൂൾബാറിലെ 'Stop' ബട്ടൺ തിരഞ്ഞെടുക്കേണ്ടതുണ്ട്.
- വിദ്യാർത്ഥികൾക്ക് അവരുടെ പ്രോജക്ടുകൾ പരീക്ഷിക്കാനും അപ്ഡേറ്റുകൾ വരുത്താനും സമയം അനുവദിക്കുക, ആവശ്യമെങ്കിൽ വീണ്ടും പരീക്ഷിക്കുക.
- പരേഡ് റൂട്ടിൽ വിദ്യാർത്ഥികൾക്ക് അവരുടെ പ്രോജക്ടുകൾ പരീക്ഷിക്കാൻ അവസരം ലഭിച്ചുകഴിഞ്ഞാൽ, അവരുടെ പരേഡ് ഫ്ലോട്ട് അറ്റാച്ചുമെന്റുകൾ കോഡ് ബേസിലേക്ക് ചേർക്കാൻ അവരെ അനുവദിക്കുക, എല്ലാ ഗ്രൂപ്പുകളും ഊഴമനുസരിച്ച് അവരുടെ പ്രോജക്ടുകൾ നടത്തുന്ന ഒരു മുഴുവൻ ക്ലാസ് പരേഡിൽ പങ്കെടുക്കുക.
- നേരത്തെ ഫിനിഷ് ചെയ്യുന്നതും കൂടുതൽ വെല്ലുവിളികൾ ആവശ്യമുള്ളതുമായ വിദ്യാർത്ഥികൾക്ക്, പരേഡ് റൂട്ടിൽ വ്യത്യസ്തമായ തുക തിരിക്കാൻ അവരുടെ റോബോട്ടിനെ കോഡ് ചെയ്യിക്കുക. വിദ്യാർത്ഥികൾക്ക് ഇനിപ്പറയുന്ന സാഹചര്യം നൽകുക:
- പരേഡ് റൂട്ടിലെ തിരിവ് 90 ഡിഗ്രി ആണെങ്കിലോ? നിങ്ങളുടെ കണക്കുകൂട്ടലുകൾ എങ്ങനെ മാറും? ഇത് പരീക്ഷിച്ചു നോക്കൂ, നിങ്ങളുടെ ഗണിതം വിജയിച്ചോ എന്ന്.
- പരേഡ് നീട്ടി! നിങ്ങളുടെ പ്രോജക്റ്റ് അവസാനിക്കുമ്പോൾ, പരേഡ് റൂട്ടിൽ തുടരാൻ നിങ്ങൾ 90 ഡിഗ്രി ഇടത്തേക്ക് തിരിയേണ്ടതുണ്ട്. നിങ്ങളുടെ പ്രോജക്റ്റിന്റെ അടിയിൽ രണ്ട് അധിക [സ്പിൻ മോട്ടോർ] ബ്ലോക്കുകൾ ചേർത്ത് കണക്കുകൂട്ടലുകൾ നടത്തുക.
- വിദ്യാർത്ഥികളെ പരേഡ് റൂട്ട് ടെംപ്ലേറ്റ് തുറക്കാൻ പറഞ്ഞുകൊണ്ട് ആരംഭിക്കുക.
- സൗകര്യമൊരുക്കുകവിദ്യാർത്ഥികൾ അവരുടെ പ്രോജക്റ്റുകൾ നിർമ്മിക്കുകയും പരീക്ഷിക്കുകയും ചെയ്യുമ്പോൾ അവരുമായി ഒരു സംഭാഷണം സുഗമമാക്കുക: ഇതുപോലുള്ള ചോദ്യങ്ങൾ ഉപയോഗിച്ച്:
- റോബോട്ട് 360 ഡിഗ്രിക്ക് പകരം 180 ഡിഗ്രി തിരിയാൻ പ്ലേ പാർട്ട് 1 ൽ നിന്ന് നിങ്ങളുടെ കണക്കുകൂട്ടലിൽ എന്താണ് മാറ്റേണ്ടത്?
- ഈ രണ്ട് തിരിവുകൾ തമ്മിലുള്ള ബന്ധം എന്താണ്? അത് നിങ്ങളുടെ കണക്കുകൂട്ടലുകളെ എങ്ങനെ ബാധിക്കുന്നു?
വിദ്യാർത്ഥികൾ അവരുടെ പ്രോജക്ടുകൾ പരീക്ഷിക്കുമ്പോൾ പ്രശ്നപരിഹാര തന്ത്രങ്ങൾ സുഗമമാക്കുക. വിദ്യാർത്ഥികൾ അവരുടെ കണക്കുകൂട്ടലുകൾ പരിശോധിക്കാൻ കോഡ് ബേസ് ഉപയോഗിക്കുന്നു, പരേഡ് റൂട്ടിന്റെ അവസാനം വരെ ഡ്രൈവ് ചെയ്യാനും 180 ഡിഗ്രി ടേൺ ചെയ്യാനും ആവശ്യമായ ശരിയായ തിരിവുകളുടെ എണ്ണം അവർ കണക്കാക്കിയിട്ടുണ്ടെന്ന് അവർ ഉറപ്പാക്കേണ്ടതുണ്ട്, തുടർന്ന് ആ വിവരങ്ങൾ [സ്പിൻ ഫോർ] ബ്ലോക്കിൽ ശരിയായി നൽകുക. വിദ്യാർത്ഥികൾ ജോലി ചെയ്യുമ്പോൾ ചോദ്യങ്ങൾ ചോദിക്കുകയും ഫീഡ്ബാക്ക് നൽകുകയും ചെയ്യുക, എന്നാൽ ഈ ലാബിലെ പ്രവർത്തനം സുഗമമാക്കുമ്പോൾ വിദ്യാർത്ഥികൾക്ക് ഉത്തരങ്ങൾ നൽകുന്നത് ഒഴിവാക്കുക.
ഉപയോഗിക്കുന്ന അളവെടുപ്പ് യൂണിറ്റുകളെ അടിസ്ഥാനമാക്കിയോ, അളവുകൾ റൗണ്ട് ചെയ്യുമ്പോഴുള്ള ചെറിയ വ്യതിയാനങ്ങൾ മൂലമോ ലായനിയിൽ വ്യത്യാസങ്ങൾ ഉണ്ടാകാം. ഒരു പരിഹാരത്തിനുള്ള ഒരു ഉദാഹരണമാണ് താഴെ കൊടുത്തിരിക്കുന്നത്.
സാധ്യമായ ലാബ് 5 പരിഹാരം - ഓർമ്മിപ്പിക്കുകഉദ്ദേശിച്ച രീതിയിൽ ഊഴം ലഭിക്കാൻ അവരുടെ കോഡ് ബേസ് ലഭിക്കാൻ ഒന്നിലധികം ശ്രമങ്ങൾ വേണ്ടിവന്നേക്കാമെന്ന് വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക. ഒന്നിലധികം ശ്രമങ്ങൾ പരീക്ഷണ പ്രക്രിയയുടെ ഭാഗമാണ്, കൂടാതെ അവരുടെ ഗണിതം ശരിയായിരുന്നോ എന്നതിന്റെ ഒരു പ്രധാന സൂചകവുമാണ്. അവർ ഗണിത, VEXcode GO പ്രോജക്ടുകൾ പഠിച്ച് പ്രവർത്തിക്കുമ്പോൾ, ഇനിപ്പറയുന്ന ചോദ്യങ്ങൾ അവരോട് ചോദിക്കുക.
- നിങ്ങളുടെ പ്രോജക്റ്റ് നടത്തിയപ്പോൾ നിങ്ങളുടെ കോഡ് ബേസ് എത്രത്തോളം പുരോഗമിച്ചു? അത് വളരെയധികം വളവുകൾ ആയിരുന്നോ, വളരെ കുറച്ച് വളവുകൾ ആയിരുന്നോ, അതോ മതിയായിരുന്നോ?
- നിങ്ങളുടെ കോഡ് ബേസ് വളരെയധികം അല്ലെങ്കിൽ വളരെ കുറവായി മാറിയെങ്കിൽ, നിങ്ങളുടെ കണക്കുകൂട്ടലുകളിൽ നിങ്ങൾക്ക് എന്ത് പരിശോധിക്കാൻ കഴിയും?
- നിങ്ങളുടെ VEXcode GO പ്രോജക്റ്റിൽ എന്തൊക്കെ പരിശോധിക്കാൻ കഴിയും?
- ചോദിക്കുകവീൽ വലുപ്പങ്ങൾ അല്ലെങ്കിൽ തിരിയുന്ന ദൂരം പോലുള്ള വ്യത്യസ്ത വേരിയബിളുകൾ അവരുടെ കണക്കുകൂട്ടലുകളെ ബാധിക്കുമെന്ന് ചിന്തിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുക?
- നിങ്ങളുടെ പക്കൽ വലിയ ചക്രങ്ങളുള്ള ഒരു റോബോട്ട് ഉണ്ടെങ്കിൽ, അത് മൊത്തം തിരിവുകളുടെ എണ്ണത്തെ എങ്ങനെ ബാധിക്കും? എന്തുകൊണ്ടാണ് നിങ്ങൾ അങ്ങനെ പറയുന്നത്?
- ചെറിയ ചക്രങ്ങളുള്ള ഒരു റോബോട്ട് ഉണ്ടെങ്കിൽ, അത് മൊത്തം തിരിവുകളുടെ എണ്ണത്തെ എങ്ങനെ ബാധിക്കും? എന്തുകൊണ്ടാണ് നിങ്ങൾ അങ്ങനെ പറയുന്നത്?