
Jouer
Partie 1 – Étape par étape
- InstruireDites aux élèves qu'ils appliqueront ce qu'ils ont appris dans Engage, pour
que leur robot effectue un virage à 360 degrés à l'aide des blocs [Tourner pour]. L'animation ci-dessous
montre comment le robot doit se déplacer lorsqu'il effectue un virage à 360 degrés.
Fichier vidéo
- Les élèves connaissent la distance que le robot doit parcourir, ils doivent maintenant calculer le nombre de tours de roue nécessaires et saisir ce nombre dans les blocs [Tourner pour]. Si la solution est correcte, le robot effectuera un tour de 360 degrés .
- ModèleModèle permettant aux étudiants de tester leurs solutions avec la base de code.
- Commencez par montrer aux élèves comment connecter le cerveau de leur base de code à leur appareil dans VEXcode GO. Parce que les étapes de connexion varient selon les appareils, voir le section sur la connexion des articles dans la bibliothèque VEXcode GO STEM pour les étapes spécifiques de connexion du VEX GO Brain sur votre ordinateur ou votre tablette.
- Une fois connectés, ils ouvriront l'exemple de projet de char de parade. Pour ce faire, sélectionnez
« Fichier » dans la barre d’outils, puis « Ouvrir des exemples ». Ensuite, demandez aux élèves de
sélectionner l’exemple de projet « Char de parade ».
-
Regardez la vidéo ci-dessous pour voir comment ouvrir l'exemple de projet Parade Float dans VEXcode GO.
Fichier vidéo
-
-
Une fois le projet d'exemple ouvert, les élèves devront changer la direction du moteur droit en marche arrière, en sélectionnant le menu déroulant dans le bloc [Tourner pour]. Regardez la vidéo ci-dessous pour voir comment modifier le paramètre pour faire tourner le robot dans ce projet.
Fichier vidéo - Demandez aux élèves de nommer leur projet « Parade Float Turn et de l’enregistrer sur leur appareil. Consultez cette section d'articles pour connaître les étapes spécifiques à l'appareil pour enregistrer un VEXcode GO. projet.
- Lorsqu'ils sont prêts, les élèves leur solution dans les paramètres des blocs [Spin for].
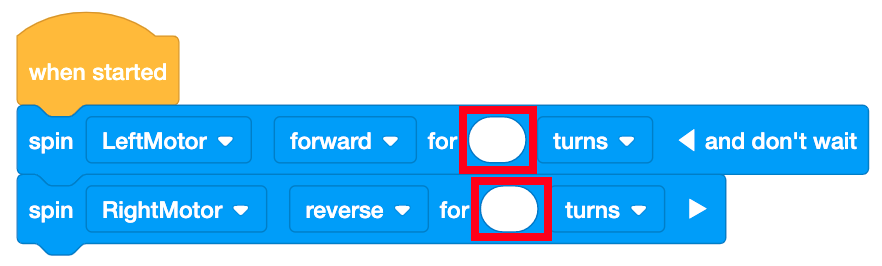
Solutions d'entrée dans les paramètres pour tester - Une fois que les étudiants ont saisi leurs solutions, « Démarrer » dans VEXcode GO pour tester le projet.
Sélectionnez « Démarrer » pour tester le projet - Les étudiants devront sélectionner le bouton « Arrêter » dans la barre d'outils VEXcode GO pour arrêter le projet.
- Laissez le temps aux élèves de tester leurs projets et d’effectuer des mises à jour, puis de tester à nouveau, si nécessaire.
- Pour les élèves qui terminent tôt et ont besoin de défis supplémentaires, demandez-leur de travailler sur le calcul du nombre de tours de roue nécessaires pour que le robot fasse un virage à 180 degrés Demandez-leur de le tester et de voir si leurs calculs ont été réussis.
- FaciliterFacilitez une conversation avec les élèves pendant qu'ils apprennent à coder
le robot pour qu'il effectue un virage à 360 degrés avec des questions telles que :
- Qu'essayons-nous de calculer ?
- Quelle est la distance totale que le robot doit parcourir pour effectuer un virage à 360 ? Comment avons-nous déterminé cela ?
- Connaissant la distance totale que le robot doit parcourir pour effectuer un virage à 360 degrés et sachant jusqu'où le robot se déplace avec un tour de roue, comment pouvons-nous savoir combien de tours chaque roue doit faire pour que l'ensemble du robot tourne à 360 degrés ?
- Quelles informations saisissez-vous dans les blocs [Spin for] ? D'où vient ce numéro ?
Facilitez les stratégies de dépannage pendant que les étudiants testent leurs projets. Les étudiants la base de code pour vérifier leurs solutions et, ce faisant, ils devront s'assurer qu'ils ont calculé la quantité correcte dont les roues doivent tourner. Ils devront également vérifier qu'ils ont correctement saisi ces informations dans les blocs [Spin for]. Posez des questions et donnez votre avis pendant que les élèves travaillent, mais évitez de leur donner les réponses pendant que vous animez l'activité dans ce laboratoire.
- La valeur du bloc [Spin for] est-elle la même que votre solution ?
- La décimale est-elle à la bonne place ?
- Les valeurs sont-elles les mêmes dans les deux blocs [Spin for] ?
Si la base de code ne tourne pas sur la bonne distance et que toutes les entrées sont exactes, cela signifie que leur solution (le nombre de tours de roue nécessaires) est incorrecte. Guidez-les pour vérifier leurs calculs ou essayez une méthode différente pour trouver cette distance.
Il peut y avoir des variations dans la solution en fonction des unités de mesure utilisées ou en raison de variations lors de l'arrondi des mesures. Voici un exemple de solution.
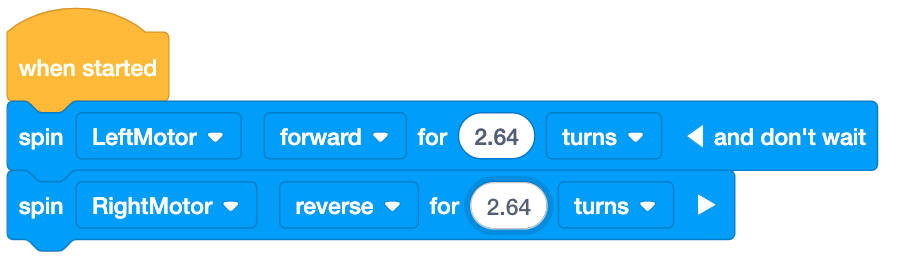
Solution possible - RappelRappelez aux élèves qu’il faudra peut-être plusieurs essais pour que leur projet
fonctionne. Les essais et erreurs font partie du processus de test et constituent un indicateur important
pour savoir si leurs calculs étaient corrects.
- Votre robot est-il allé trop loin ? Ou pas assez loin ? Pourquoi pensez-vous que cela est arrivé ?
- DemandezDemandez aux élèves comment le codage des robots pour se déplacer avec
précision peut être utile dans d’autres domaines.
- Et si vous codiez votre robot pour qu'il traverse un labyrinthe. Pourquoi serait-il important que le robot tourne avec précision ?
Pause à mi-jeu & Discussion de groupe
Dès que chaque groupe a eu le temps de calculer le nombre de tours de roue nécessaires pour effectuer un virage à 360 degrés et de tester leurs solutions, réunissez-vous pour une brève conversation.
C'est le moment de vérifier la compréhension et de corriger les idées fausses que les élèves pourraient avoir avant de passer à la partie ludique 2. Donnez aux groupes d’étudiants l’occasion de partager leurs solutions et leurs méthodes avec des questions telles que :
- Sachant que le robot devait tourner à 360 degrés, comment avez-vous déterminé le nombre de tours de roue
nécessaires ?
- Pouvez-vous montrer et expliquer votre calcul ?
Partie 2 – Étape par étape
- InstruireDites aux élèves qu'ils appliqueront ce qu'ils ont appris dans la partie 1 de
la partie Jouer pour que leur robot effectue un virage à 180 degrés, au lieu d'un virage à 360 degrés, en
utilisant les blocs [Tourner pour] afin de terminer un parcours de défilé. Ils utiliseront également leurs
solutions du laboratoire 4 pour permettre au robot de parcourir la bonne distance sur le parcours du
défilé.
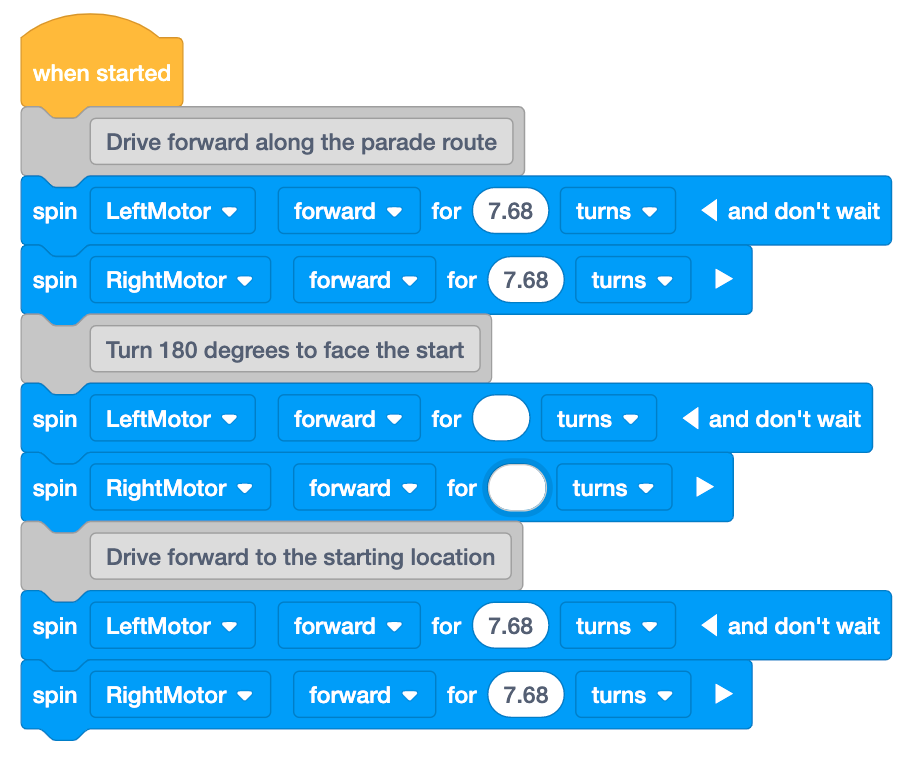
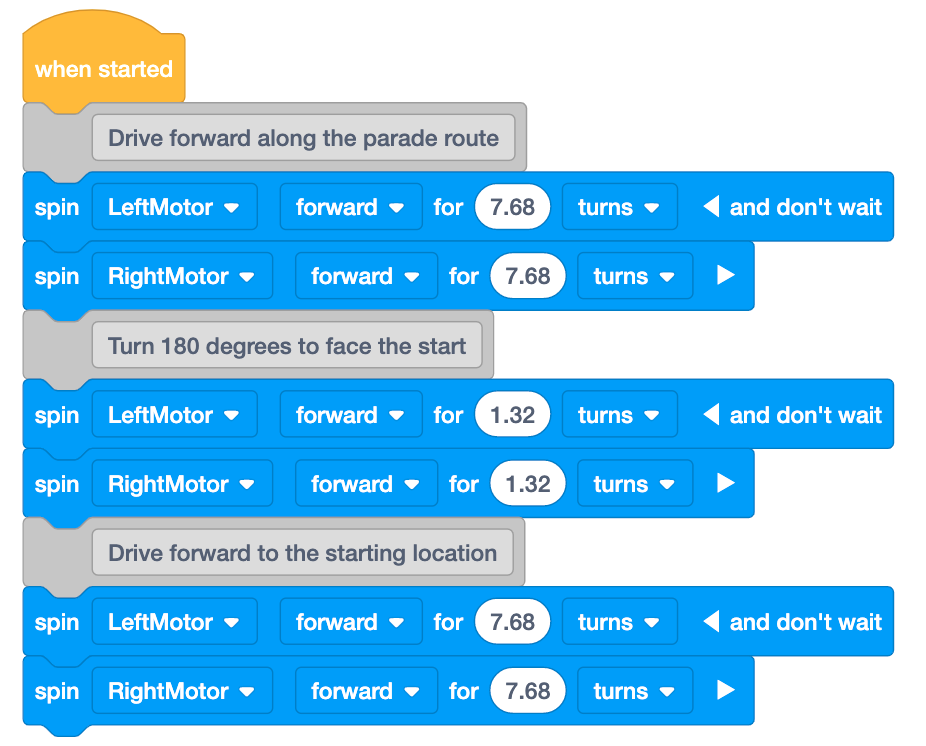
L'animation ci-dessous montre comment le robot doit se déplacer lorsqu'il termine le parcours du défilé : avancer sur 48 pouces (122 cm), tourner sur 180 degrés, puis avancer sur 48 pouces (122 cm) pour revenir au départ. Ceci utilise le modèle de code ci-dessus.
Fichier vidéo - ModèleModèle permettant aux étudiants de démarrer leurs projets dans VEXcode GO.
- Commencez par demander aux élèves d’ouvrir le modèle d’itinéraire du défilé.
- Veuillez noter que les blocs [Commentaire] sont inclus pour décrire section du projet. Si vous souhaitez en savoir plus sur les commentaires dans VEXcode GO, voir cet article.
- Notez également que le premier et le dernier ensemble de paramètres ont été renseignés avec des valeurs basées sur les solutions du laboratoire 4 pour conduire le robot sur 48 pouces (122 cm), la longueur du parcours du défilé. Ces valeurs peuvent être légèrement différentes des solutions des étudiants du laboratoire 4 en raison de légères variations dans les mesures d'arrondi.
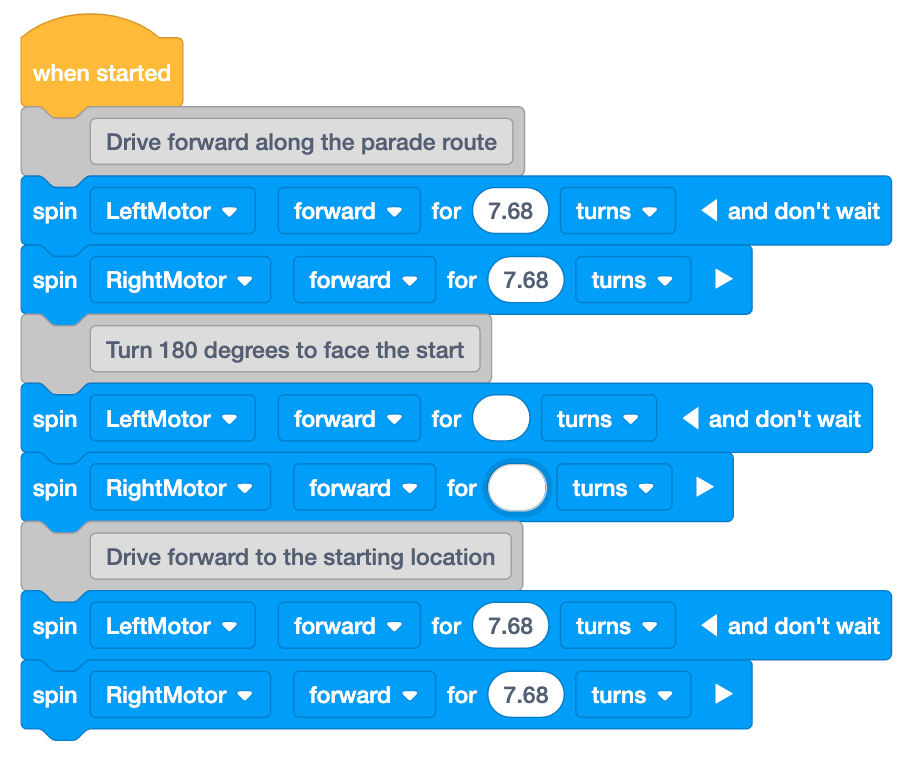
Modèle d'itinéraire de défilé - Les élèves devront calculer le nombre de tours de roue nécessaires pour effectuer un virage à 180 degrés et saisir ces valeurs dans les blocs mis en surbrillance.
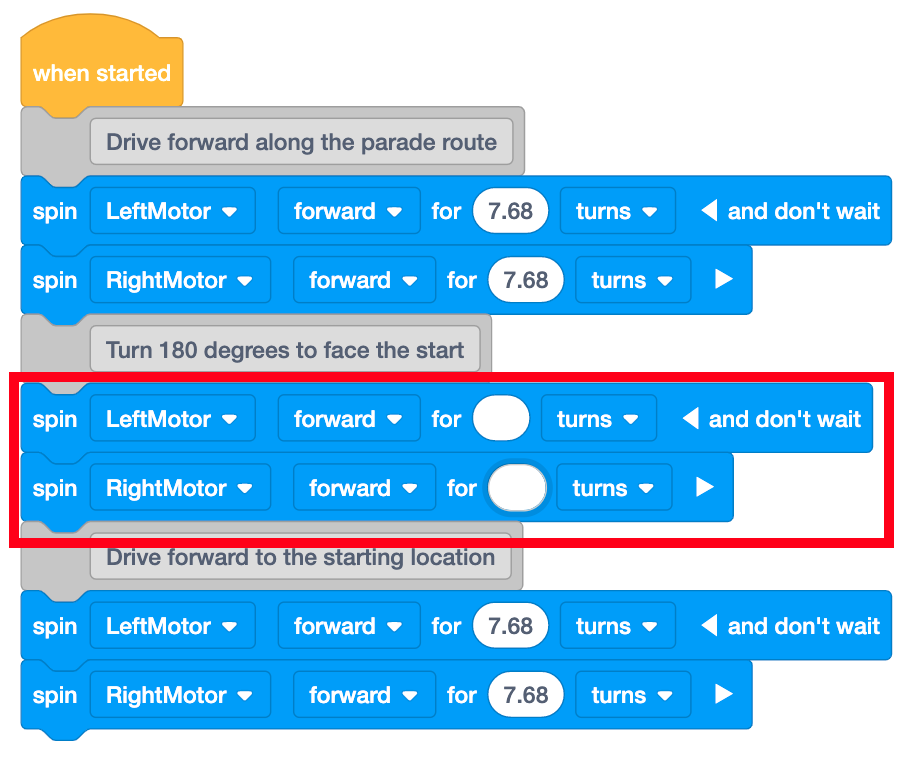
tours de roue d'entrée nécessaires pour effectuer le virage à 180 degrés - Une fois que les élèves ont saisi toutes les valeurs, ils sont prêts à enregistrer leur projet et à tester leur solution avec leur robot.
- Demandez aux élèves de nommer leur projet Parade Float Lab 5 et de l'enregistrer sur leur appareil. Consultez cette section d'articles pour connaître les étapes spécifiques à l'appareil pour enregistrer un VEXcode GO. projet.
Modèle permettant aux élèves de tester leur projet sur le parcours du défilé.
- Tout d’abord, montrez-leur comment placer leur robot au point de départ comme indiqué dans l’image ci-dessous. Utilisez le support bleu sur la roue pour aider à aligner le centre de la roue avec le bord avant de la ligne de départ.
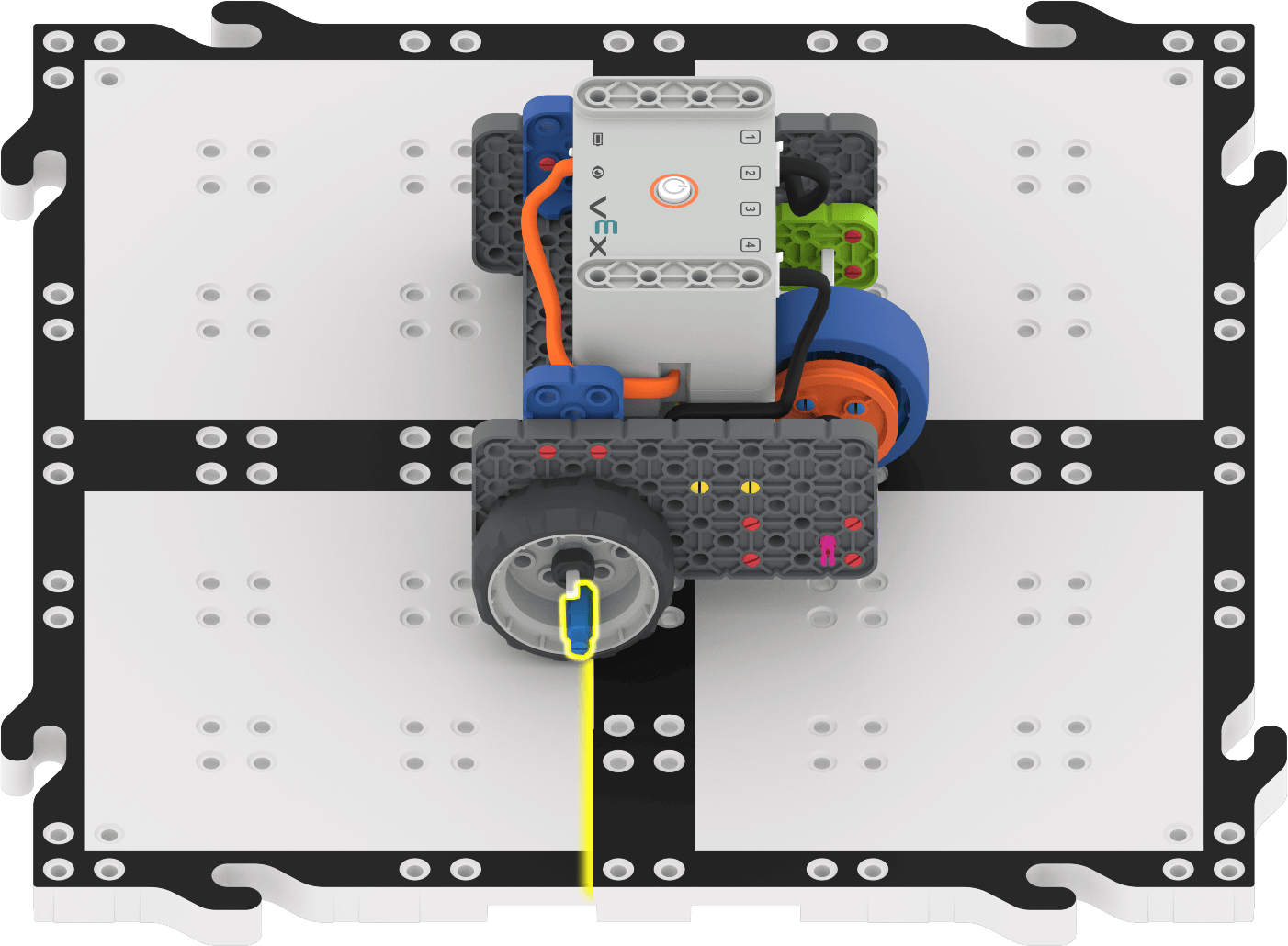
Utilisez le support bleu pour aider à aligner l'axe de roue et l'avant de la ligne de départ - Une fois la base de code en place, sélectionnez « Démarrer » dans VEXcode GO pour tester le projet.
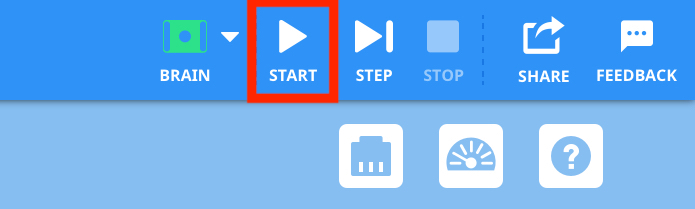
Sélectionnez Démarrer pour tester le projet - Les étudiants devront sélectionner le bouton « Arrêter » dans la barre d'outils VEXcode GO pour arrêter le projet.
- Laissez le temps aux élèves de tester leurs projets et d’effectuer des mises à jour, puis de tester à nouveau si nécessaire.
- Une fois que les élèves ont eu la chance de tester leurs projets sur le parcours du défilé, demandez leur d'ajouter leurs pièces jointes de chars de défilé à la base de code et de participer à un défilé de classe où tous les groupes se relaient et exécutent leurs projets.
- Pour les élèves qui terminent tôt et ont besoin de défis supplémentaires, demandez-leur de coder
leur robot pour qu'il tourne d'une distance différente sur le parcours du défilé. Donnez aux
élèves le scénario suivant :
- Et si le virage sur le parcours du défilé était à 90 degrés ? Comment vos calculs changeraient-ils ? Testez-le et voyez si vos calculs sont réussis.
- Le défilé a été prolongé ! À la fin de votre projet, vous devez effectuer un virage à 90 degrés vers la gauche pour continuer sur le parcours du défilé. Ajoutez deux blocs [Spin motor] supplémentaires au bas de votre projet et effectuez les calculs.
- Commencez par demander aux élèves d’ouvrir le modèle d’itinéraire du défilé.
- FaciliterFacilitez une conversation avec les élèves pendant qu'ils construisent et
testent leurs projets avec des questions telles que :
- Que devez-vous modifier dans votre calcul de la partie 1 pour que le robot tourne à 180 degrés au lieu de 360 ?
- Quel est le rapport entre ces deux tours ? Comment cela affecte-t-il vos calculs ?
Facilitez les stratégies de dépannage pendant que les étudiants testent leurs projets. Les élèves utilisent la base de code pour vérifier leurs calculs et ils devront s'assurer qu'ils ont calculé le nombre correct de tours nécessaires pour se rendre jusqu'au bout du parcours du défilé et effectuer le virage à 180 degrés, puis saisir correctement ces informations dans le bloc [Spin for]. Posez des questions et donnez votre avis pendant que les élèves travaillent, mais évitez de leur donner les pendant que vous animez l'activité dans ce laboratoire.
Il peut y avoir des variations dans la solution en fonction des unités de mesure utilisées ou en raison de légères variations lors de l'arrondi des mesures. Voici un exemple de solution.
Solution possible pour le laboratoire 5 - RappelRappelez aux élèves qu'il faudra peut-être plusieurs essais pour que leur base de
code effectue le virage prévu. Les essais multiples font partie du processus de test et constituent un
indicateur important pour savoir si leurs calculs sont corrects. Pendant qu'ils avancent et travaillent
sur leurs projets mathématiques et VEXcode GO, posez-leur les questions suivantes.
- Jusqu’où votre base de code s’est-elle tournée lorsque vous avez exécuté votre projet ? Était-ce trop de tours, trop peu de tours ou juste assez ?
- Si votre base de code est devenue trop ou trop peu, que pouvez-vous vérifier dans vos calculs ?
- Que pouvez-vous vérifier dans votre projet VEXcode GO ?
- DemandezDemandez aux élèves de réfléchir à différentes variables telles que la taille
des roues ou la distance de braquage qui pourraient affecter leurs calculs ?
- Si vous aviez un robot avec des roues plus grandes, quel impact cela aurait-il sur le nombre total de tours ? Pourquoi dis-tu ça ?
- Si vous aviez un robot avec des roues plus petites, quel impact cela aurait-il sur le nombre total de tours ? Pourquoi dis-tu ça ?