
खेल
भाग 1 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे एंगेज में जो कुछ भी सीखा है उसे लागू करेंगे, अपने रोबोट को [स्पिन फॉर] ब्लॉक का उपयोग करके 360 डिग्री मोड़ देंगे। नीचे दिया गया एनीमेशन दर्शाता है कि रोबोट को 360 डिग्री घूमते समय किस प्रकार चलना चाहिए। एनीमेशन में रोबोट के दक्षिणावर्त घूमने पर घूर्णन की डिग्री 360 तक गिनी जाती है।
वीडियो फाइल
- छात्रों को पता है कि रोबोट को कितनी दूरी तय करनी है, अब उन्हें आवश्यक पहिया घुमावों की संख्या की गणना करनी है और उस संख्या को [स्पिन फॉर] ब्लॉकों में इनपुट करना है। यदि समाधान सही है, तो रोबोट 360 डिग्री का चक्कर पूरा कर लेगा।
- मॉडलछात्रों के लिए मॉडल कि वे कोड बेस के साथ अपने समाधान का परीक्षण कैसे करें।
- छात्रों को यह दिखाकर शुरुआत करें कि वे अपने कोड बेस पर स्थित ब्रेन को VEXcode GO में अपने डिवाइस से कैसे कनेक्ट करें। चूंकि विभिन्न डिवाइसों के बीच कनेक्शन के चरण भिन्न होते हैं, VEX GO ब्रेन को अपने कंप्यूटर या टैबलेट से कनेक्ट करने के विशिष्ट चरणों के लिए VEXcode GO STEM में कनेक्टिंग अनुभाग देखें।
- एक बार कनेक्ट होने के बाद, वे परेड फ्लोट उदाहरण परियोजना खोलेंगे। ऐसा करने के लिए, टूलबार से 'फ़ाइल' चुनें, फिर 'उदाहरण खोलें' चुनें। इसके बाद, छात्रों से 'परेड फ्लोट' उदाहरण परियोजना का चयन करवाएं।
-
VEXcode GO में परेड फ्लोट उदाहरण प्रोजेक्ट को खोलने का तरीका जानने के लिए नीचे दिया गया वीडियो देखें। GO टूलबार में फ़ाइल मेनू खोला जाता है और ड्रॉपडाउन से चौथे आइटम पर क्लिक किया जाता है जिस पर लिखा होता है 'ओपन उदाहरण'। GO उदाहरण प्रोजेक्ट्स मेनू खुलता है और परेड फ्लोट प्रोजेक्ट का चयन और लोड किया जाता है।
वीडियो फाइल
-
-
एक बार उदाहरण परियोजना खुल जाने के बाद, छात्रों को [स्पिन फॉर] ब्लॉक में ड्रॉपडाउन का चयन करके दाएं मोटर की दिशा कोरिवर्स,में बदलना होगा। इस परियोजना में रोबोट को घुमाने के लिए पैरामीटर को कैसे बदला जाए, यह देखने के लिए नीचे दिया गया वीडियो देखें। दूसरे [स्पिन फॉर] ब्लॉक में दिशा ड्रॉपडाउन पर क्लिक करके इसे खोला जाता है और दिशा 'आगे' से 'पीछे' में बदल जाती है।
वीडियो फाइल - छात्रों को अपने प्रोजेक्ट का नाम परेड फ्लोट टर्न रखने को कहें तथा उसे अपने डिवाइस में सेव करने को कहें। VEXcode GO प्रोजेक्ट को सहेजने के लिए डिवाइस-विशिष्ट चरणों के लिए लेख का यह अनुभाग देखें.
- जब वे तैयार हो जाएंगे, तो छात्र अपने समाधान को [स्पिन फॉर] ब्लॉक के मापदंडों में इनपुट करेंगे।
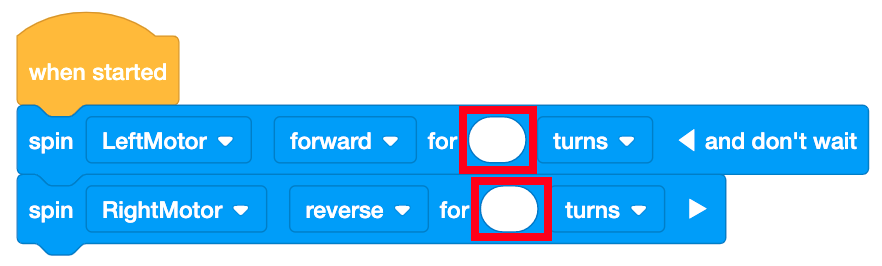
परीक्षण के लिए मापदंडों में समाधान इनपुट करें - एक बार जब छात्र अपने समाधान इनपुट कर दें, तो प्रोजेक्ट का परीक्षण करने के लिए VEXcode GO में 'प्रारंभ' का चयन करें।
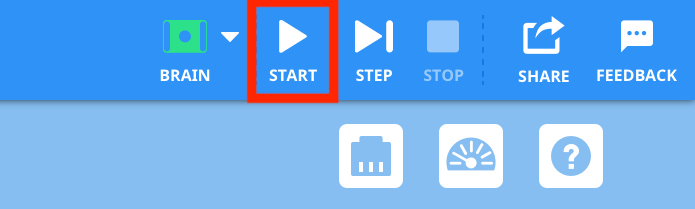
प्रोजेक्ट परीक्षण करने के लिए 'प्रारंभ' चुनें- छात्रों को प्रोजेक्ट को रोकने के लिए VEXcode GO टूलबार में 'स्टॉप' बटन का चयन करना होगा।
- विद्यार्थियों को अपनी परियोजनाओं का परीक्षण करने और उन्हें अद्यतन करने का समय दें, फिर यदि आवश्यक हो तो पुनः परीक्षण करें।
- जो छात्र जल्दी काम समाप्त कर लेते हैं और उन्हें अतिरिक्त चुनौतियों की आवश्यकता होती है, उन्हें रोबोट को 180 डिग्री घुमाने के लिए आवश्यक पहियों के घुमावों की संख्या की गणना करने का काम दें। उन्हें इसका परीक्षण करने को कहें और देखें कि क्या उनका गणित सफल रहा।
- सुविधा प्रदान करनाविद्यार्थियों के साथ बातचीत में सुविधा प्रदान करना, जब वे रोबोट को 360 डिग्री घुमाने के लिए कोड करने के तरीके पर काम कर रहे हों, जैसे कि:
- हम क्या गणना करने का प्रयास कर रहे हैं?
- रोबोट को 360 डिग्री घूमने के लिए कुल कितनी दूरी तय करनी होगी? हमने यह कैसे निर्धारित किया?
- यह जानते हुए कि रोबोट को 360 डिग्री घूमने के लिए कितनी दूरी तय करनी होगी, तथा यह जानते हुए कि एक पहिये के घूमने पर रोबोट कितनी दूरी तय करेगा, हम यह कैसे पता लगा सकते हैं कि पूरे रोबोट को 360 डिग्री घुमाने के लिए प्रत्येक पहिये को कितने चक्कर लगाने होंगे?
- आप [स्पिन फॉर] ब्लॉक में क्या जानकारी इनपुट कर रहे हैं? यह संख्या कहां से आई?
छात्रों को अपनी परियोजनाओं का परीक्षण करते समय समस्या निवारण रणनीतियों में सहायता प्रदान करें। छात्र अपने समाधानों की जांच करने के लिए कोड बेस का उपयोग कर रहे हैं, और ऐसा करते समय, उन्हें यह सुनिश्चित करना होगा कि उन्होंने पहियों को घुमाने के लिए आवश्यक सही मात्रा की गणना की है। उन्हें यह भी जांचना होगा कि उन्होंने उस जानकारी को [स्पिन फॉर] ब्लॉक में सही ढंग से इनपुट किया है। जब छात्र काम कर रहे हों तो प्रश्न पूछें और फीडबैक दें, लेकिन जब आप इस प्रयोगशाला में गतिविधि संचालित कर रहे हों तो छात्रों को उत्तर देने से बचें।
- क्या [स्पिन फॉर] ब्लॉक का मान आपके समाधान के समान है?
- क्या दशमलव सही स्थान पर है?
- क्या दोनों [स्पिन फॉर] ब्लॉकों में मान समान हैं?
यदि कोड बेस सही दूरी तक नहीं घूमता है और सभी इनपुट सटीक हैं, तो इसका मतलब है कि उनका समाधान (पहियों के आवश्यक घुमावों की संख्या) गलत है। उन्हें अपनी गणना की जांच करने के लिए मार्गदर्शन करें या इस दूरी को ज्ञात करने के लिए कोई अन्य विधि आजमाएं।
माप की प्रयुक्त इकाइयों के आधार पर या माप को पूर्णांकित करते समय होने वाली भिन्नताओं के कारण समाधान में भिन्नता हो सकती है। निम्नलिखित समाधान का एक उदाहरण है।
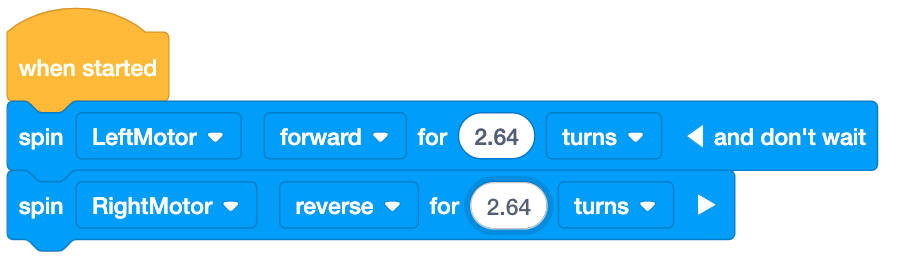
संभावित समाधान - याद दिलाएंविद्यार्थियों को याद दिलाएं कि उनके प्रोजेक्ट को पूरा करने के लिए कई प्रयास करने पड़ सकते हैं। परीक्षण और त्रुटि परीक्षण प्रक्रिया का एक हिस्सा है, तथा यह इस बात का एक महत्वपूर्ण संकेतक है कि उनका गणित सही था या नहीं।
- क्या आपका रोबोट बहुत दूर चला गया? या फिर पर्याप्त दूरी नहीं? आपको क्या लगता है ऐसा क्यों हुआ?
- पूछेंविद्यार्थियों से पूछें कि रोबोट को सटीकता से चलाने के लिए कोडिंग करना अन्य क्षेत्रों में कैसे उपयोगी हो सकता है।
- क्या होगा यदि आप अपने रोबोट को भूलभुलैया से होकर गुजरने के लिए कोड कर रहे हों? रोबोट के लिए सटीक ढंग से घूमना क्यों महत्वपूर्ण होगा?
खेल के बीच में ब्रेक & समूह चर्चा
जैसे ही प्रत्येक समूह 360 डिग्री मोड़ बनाने के लिए आवश्यक पहिया मोड़ों की संख्या की गणना करने और अपने समाधानका परीक्षण करने का समय मिल जाता है, एक संक्षिप्त बातचीत के लिए एक साथ आते हैं।
यह समय है कि खेल भाग 2 पर जाने से पहले छात्रों की समझ की जांच की जाए और उनकी किसी भी गलत धारणा को सुधारा जाए। छात्र समूहों को अपने समाधान और अपनी पद्धतियों को निम्नलिखित प्रश्नों के साथ साझा करने का अवसर दें:
- यह जानते हुए कि रोबोट को 360 डिग्री घूमना है, आपने पहियों के आवश्यक घुमावों की संख्या का निर्धारण कैसे किया?
- क्या आप अपनी गणना दिखा और समझा सकते हैं?
भाग 2 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे खेल भाग 1 में सीखी गई बातों को लागू करेंगे, जिससे उनका रोबोट परेड मार्ग को पूरा करने के लिए [स्पिन फॉर] ब्लॉक का उपयोग करते हुए 360 डिग्री मोड़ के बजाय 180 डिग्री मोड़ लेगा। वे रोबोट को परेड मार्ग में सही दूरी तक आगे बढ़ाने के लिए लैब 4 के अपने समाधानों का भी उपयोग करेंगे।
नीचे दिया गया एनीमेशन दर्शाता है कि परेड मार्ग पूरा करते समय रोबोट को किस प्रकार चलना चाहिए: 48 इंच (122 सेमी) आगे बढ़ना, 180 डिग्री तक मुड़ना, फिर 48 इंच (122 सेमी) आगे बढ़कर आरंभिक स्थान पर वापस लौटना। यह ऊपर दिए गए कोड टेम्पलेट का उपयोग कर रहा है। एनीमेशन में कोड बेस पांच जुड़ी हुई टाइलों के बीच से सीधे गुजरता है, और जब वह अंत तक पहुंचता है तो वह 180 डिग्री दाईं ओर मुड़ता है और वापस आरंभ की ओर चला जाता है।
वीडियो फाइल - मॉडलछात्रों के लिए मॉडल कि वे VEXcode GO में अपने प्रोजेक्ट कैसे शुरू करें।
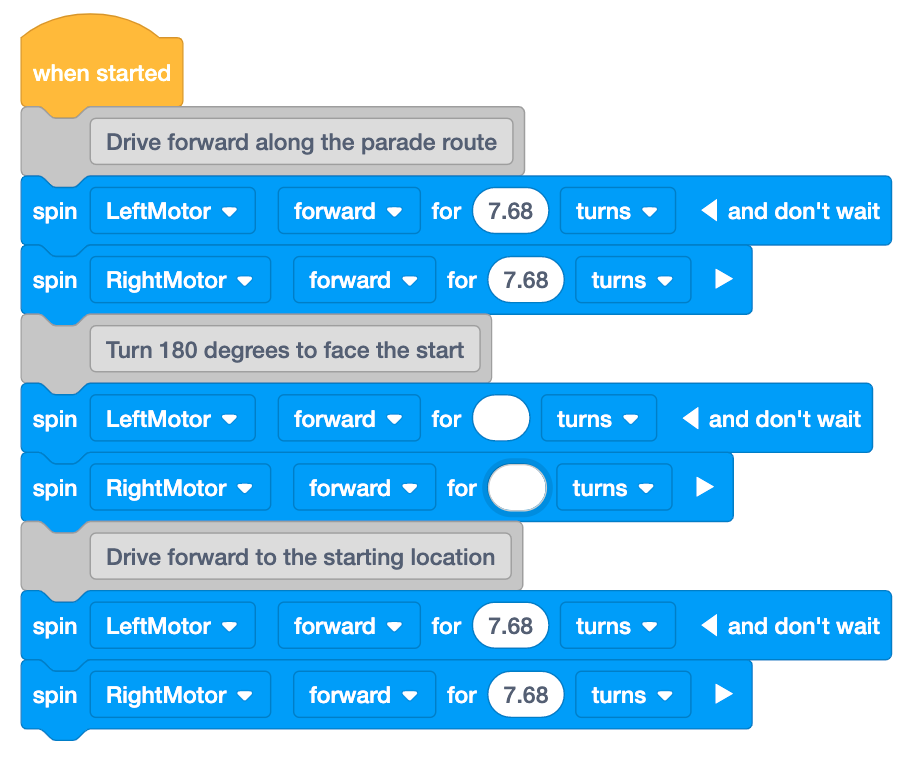
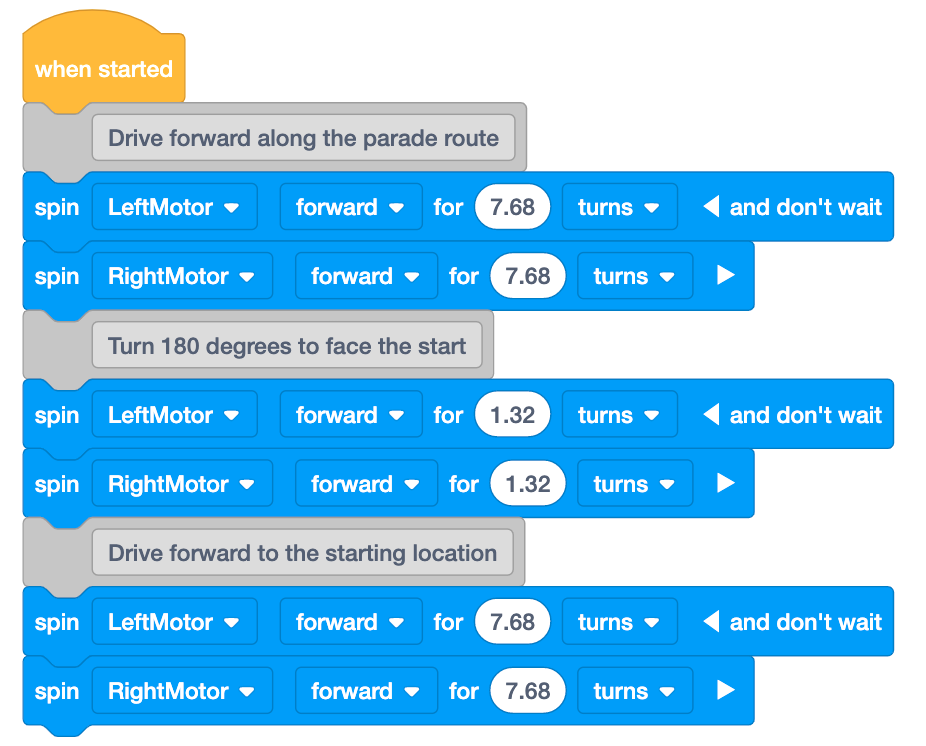
- छात्रों को परेड रूट टेम्पलेट खोलने के लिए कहें।
- कृपया ध्यान दें कि परियोजना के प्रत्येक अनुभाग का वर्णन करने के लिए [टिप्पणी] ब्लॉक शामिल किए गए हैं। यदि आप VEXcode GO में टिप्पणियों के बारे में अधिक जानना चाहते हैं, यह लेख देखें
- यह भी ध्यान रखें कि मापदंडों के पहले और अंतिम सेट को प्रयोगशाला 4 के समाधानों पर आधारित मानों से भरा गया है, ताकि रोबोट को परेड मार्ग की लंबाई 48 इंच (122 सेमी) तक चलाया जा सके। ये मान, राउंडिंग माप में मामूली भिन्नता के कारण लैब 4 में छात्रों के समाधान से थोड़ा भिन्न हो सकते हैं।
परेड रूट टेम्पलेट - छात्रों को 180 डिग्री का मोड़ लेने के लिए आवश्यक पहिया घुमावों की संख्या की गणना करनी होगी तथा उन मानों को हाइलाइट किए गए ब्लॉकों में दर्ज करना होगा।
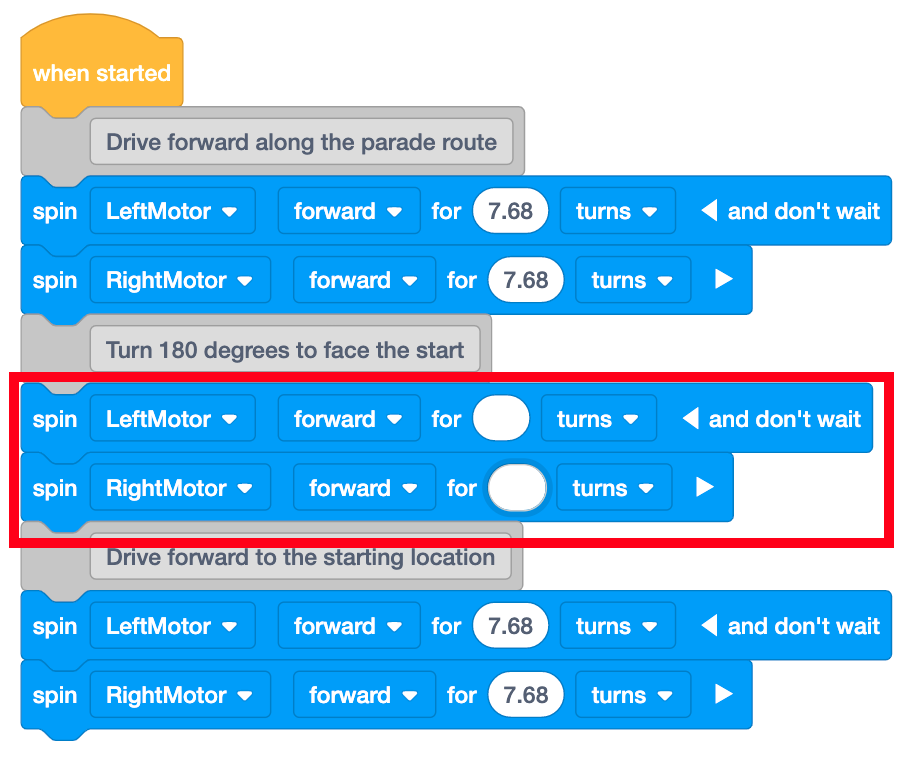
180 डिग्री का मोड़ लेने के लिए आवश्यक इनपुट व्हील टर्न - एक बार जब छात्र सभी मान इनपुट कर देते हैं, तो वे अपने प्रोजेक्ट को सेव करने और अपने रोबोट के साथ अपने समाधान का परीक्षण करने के लिए तैयार हो जाते हैं।
- छात्रों को अपने प्रोजेक्ट का नाम परेड फ्लोट लैब 5रखने और उसे अपने डिवाइस में सेव करने को कहें। VEXcode GO प्रोजेक्ट को सहेजने के लिए डिवाइस-विशिष्ट चरणों के लिए लेख का यह अनुभाग देखें.
छात्रों के लिए मॉडल प्रस्तुत करें कि वे परेड मार्ग पर अपने प्रोजेक्ट का परीक्षण कैसे करें।
- सबसे पहले, उन्हें दिखाएं कि अपने रोबोट को शुरुआत में कैसे रखें, जैसा कि नीचे दी गई छवि में दिखाया गया है। पहिये के केंद्र को प्रारंभिक रेखा के सामने के किनारे के साथ संरेखित करने में मदद के लिए पहिये पर नीले स्टैंडऑफ का उपयोग करें।
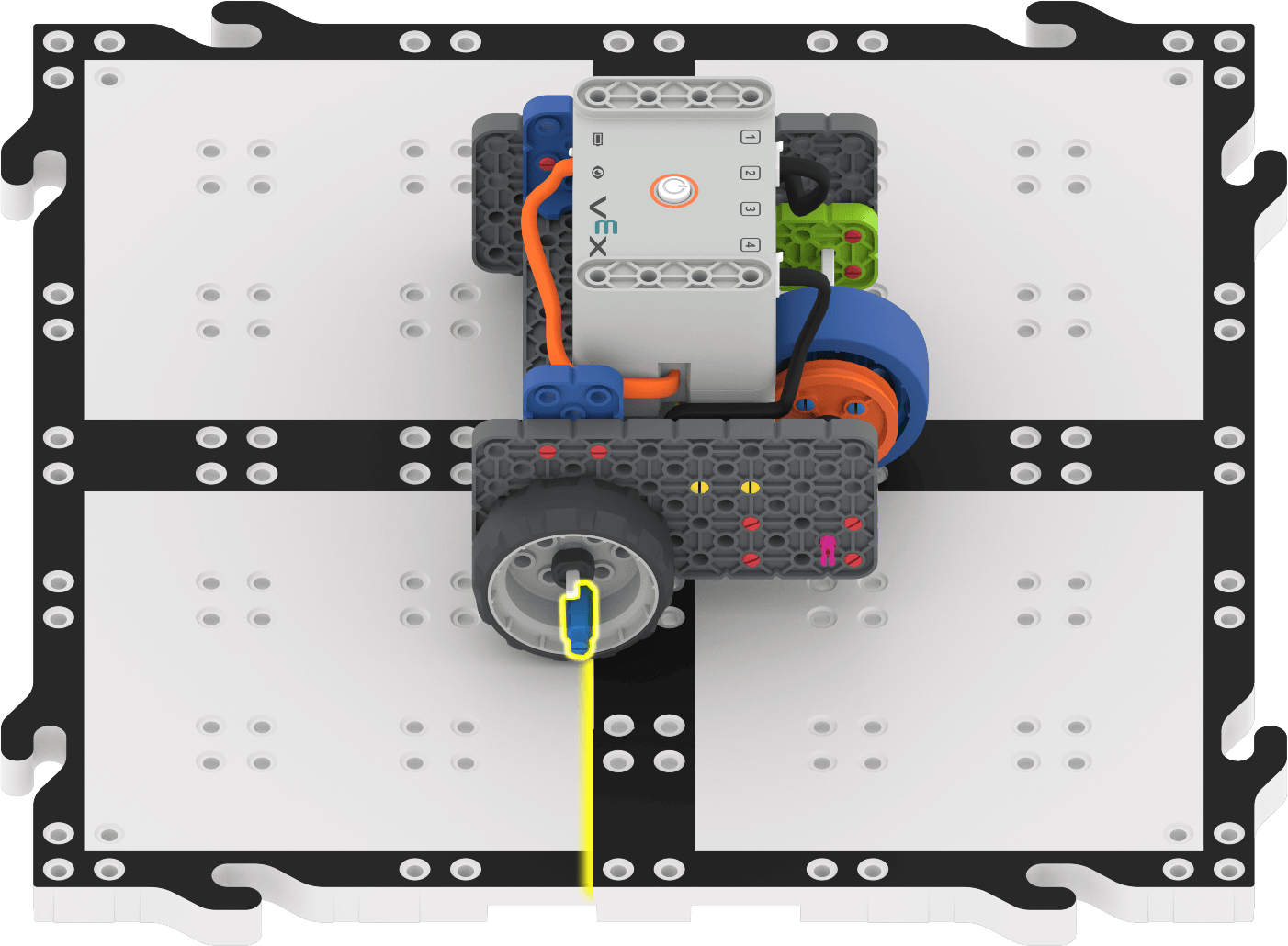
पहिये की धुरी और शुरुआती रेखा के सामने के भाग को संरेखित करने में मदद के लिए नीले स्टैंडऑफ़ का उपयोग करें - एक बार कोड बेस स्थापित हो जाने पर, प्रोजेक्ट का परीक्षण करने के लिए VEXcode GO में 'प्रारंभ' का चयन करें।
प्रोजेक्ट परीक्षण करने के लिए प्रारंभ चुनें- छात्रों को प्रोजेक्ट को रोकने के लिए VEXcode GO टूलबार में 'स्टॉप' बटन का चयन करना होगा।
- विद्यार्थियों को अपनी परियोजनाओं का परीक्षण करने, उन्हें अद्यतन करने तथा यदि आवश्यक हो तो पुनः परीक्षण करने का समय दें।
- जब छात्रों को परेड मार्ग पर अपनी परियोजनाओं का परीक्षण करने का अवसर मिल जाए, तो उन्हें अपने परेड फ्लोट संलग्नक को कोड बेस में जोड़ने को कहें तथा पूरी कक्षा की परेड में भाग लेने को कहें, जहां सभी समूह बारी-बारी से अपनी परियोजनाएं चलाएंगे।
- जो छात्र जल्दी समाप्त कर लेते हैं और उन्हें अतिरिक्त चुनौतियों की आवश्यकता होती है, उन्हें अपने रोबोट को परेड मार्ग पर अलग दिशा में मुड़ने के लिए कोड करने को कहें। विद्यार्थियों को निम्नलिखित परिदृश्य दीजिए:
- क्या होगा यदि परेड मार्ग पर मोड़ 90 डिग्री का हो? आपकी गणना कैसे बदलेगी? इसका परीक्षण करें और देखें कि क्या आपका गणित सफल रहा।
- परेड को आगे बढ़ाया गया! अपनी परियोजना के अंत में, आपको परेड मार्ग पर आगे बढ़ने के लिए बाईं ओर 90 डिग्री का मोड़ लेना होगा। अपने प्रोजेक्ट के निचले भाग में दो अतिरिक्त [स्पिन मोटर] ब्लॉक जोड़ें और गणना करें।
- छात्रों को परेड रूट टेम्पलेट खोलने के लिए कहें।
- सुविधा प्रदान करनाछात्रों के साथ बातचीत को सुविधाजनक बनाना, जब वे अपने प्रोजेक्ट बनाते और परीक्षण करते हैं, जैसे कि:
- रोबोट को 360 डिग्री के बजाय 180 डिग्री घुमाने के लिए आपको प्ले पार्ट 1 की गणना में क्या परिवर्तन करने की आवश्यकता है?
- इन दोनों मोड़ों के बीच क्या संबंध है? इससे आपकी गणना पर क्या प्रभाव पड़ता है?
छात्रों को अपनी परियोजनाओं का परीक्षण करते समय समस्या निवारण रणनीतियों में सहायता प्रदान करें। छात्र अपनी गणनाओं की जांच करने के लिए कोड बेस का उपयोग कर रहे हैं, और उन्हें यह सुनिश्चित करना होगा कि उन्होंने परेड मार्ग के अंत तक ड्राइव करने और 180 डिग्री मोड़ लेने के लिए आवश्यक मोड़ों की सही संख्या की गणना की है, फिर उस जानकारी को [स्पिन फॉर] ब्लॉक में सही ढंग से इनपुट करें। जब छात्र काम कर रहे हों तो प्रश्न पूछें और फीडबैक दें, लेकिन जब आप इस प्रयोगशाला में गतिविधि संचालित कर रहे हों तो छात्रों को उत्तर देने से बचें।
माप की प्रयुक्त इकाइयों के आधार पर या माप को पूर्णांकित करते समय मामूली भिन्नता के कारण समाधान में भिन्नता हो सकती है। निम्नलिखित समाधान का एक उदाहरण है।
संभावित प्रयोगशाला 5 समाधान - याद दिलाएंविद्यार्थियों को याद दिलाएं कि उनके कोड बेस को इच्छित मोड़ पर लाने के लिए कई प्रयास करने पड़ सकते हैं। कई बार प्रयास करना परीक्षण प्रक्रिया का हिस्सा है और यह इस बात का महत्वपूर्ण सूचक है कि उनका गणित सही था या नहीं। जब वे अपने गणित और VEXcode GO प्रोजेक्ट पर काम कर रहे हों, तो उनसे निम्नलिखित प्रश्न पूछें।
- जब आपने अपना प्रोजेक्ट चलाया तो आपका कोड बेस कितना आगे बढ़ गया? क्या ये बहुत अधिक मोड़ थे, बहुत कम मोड़ थे, या फिर पर्याप्त थे?
- यदि आपका कोड बेस बहुत अधिक या बहुत कम निकला है, तो आप अपनी गणना में क्या जांच सकते हैं?
- आप अपने VEXcode GO प्रोजेक्ट में क्या जांच सकते हैं?
- पूछेंविद्यार्थियों से पूछें कि पहिये के आकार या मोड़ने की दूरी जैसे विभिन्न चर उनकी गणना को प्रभावित कर सकते हैं?
- यदि आपके पास बड़े पहियों वाला रोबोट हो, तो इससे कुल घुमावों की संख्या पर क्या प्रभाव पड़ेगा? आप क्यों कहते हो कि?
- यदि आपके पास छोटे पहियों वाला रोबोट हो, तो इससे कुल चक्करों की संख्या पर क्या प्रभाव पड़ेगा? आप क्यों कहते हो कि?