
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนทราบว่าพวกเขาจะนำสิ่งที่เรียนรู้ใน Engage ไปใช้
โดยให้หุ่นยนต์หมุน 360 องศาโดยใช้บล็อก [หมุนสำหรับ]
แอนิเมชั่นด้านล่างนี้แสดงให้เห็นว่าหุ่นยนต์ควรเคลื่อนที่อย่างไรเมื่อหมุนตัว 360 องศา
ไฟล์วีดีโอ
- นักเรียน ทราบระยะทางที่หุ่นยนต์ต้องเคลื่อนที่ ตอนนี้พวกเขาต้องคำนวณจำนวนรอบของวงล้อที่จำเป็นและป้อนตัวเลขนั้นลงใน [หมุนสำหรับ] บล็อก หากวิธีแก้ถูกต้อง หุ่นยนต์จะหมุน 360
- แบบจำลอง แบบจำลองสำหรับนักเรียนในการทดสอบโซลูชันของตนด้วยโค้ดฐาน
- เริ่มต้นด้วยการแสดงให้ผู้เรียนเห็นถึงวิธีการเชื่อมต่อ Brain บน Code Base ของพวกเขาเข้ากับอุปกรณ์ใน VEXcode GO เนื่องจากขั้นตอนการเชื่อมต่อจะแตกต่างกันไปตามอุปกรณ์ต่างๆ, ดู ส่วนเกี่ยวกับการเชื่อมต่อบทความใน VEXcode GO STEM Library สำหรับขั้นตอนเฉพาะในการเชื่อมต่อ VEX GO Brain ไปยังคอมพิวเตอร์หรือแท็บเล็ตของคุณ.
- เมื่อเชื่อมต่อแล้ว พวกเขาจะเปิดโครงการตัวอย่าง Parade Float ในการดำเนินการดังกล่าว ให้เลือก 'ไฟล์'
จากแถบเครื่องมือ จากนั้นเลือก 'เปิดตัวอย่าง' ขั้นตอนต่อไป ให้ให้ผู้เรียนเลือกโครงการตัวอย่าง 'ขบวนแห่'
-
ชมวิดีโอด้านล่างเพื่อดูวิธีเปิดโครงการตัวอย่าง Parade Float ใน VEXcode GO
ไฟล์วีดีโอ
-
-
เมื่อเปิดโปรเจ็กต์ตัวอย่างแล้ว นักเรียนจะต้องเปลี่ยนทิศทางของมอเตอร์ด้านขวาเป็น ย้อนกลับ โดยเลือกดร็อปดาวน์ในบล็อก [หมุนสำหรับ] ดูวิดีโอด้านล่างเพื่อดูวิธีการเปลี่ยนพารามิเตอร์เพื่อให้หุ่นยนต์หมุนในโปรเจ็กต์นี้
ไฟล์วีดีโอ - ให้เด็กนักเรียนตั้งชื่อโปรเจ็กต์ของตนเองว่า Parade Float Turn และบันทึกลงในอุปกรณ์ของตน ดูสิ่งนี้ ส่วนของบทความเกี่ยวกับขั้นตอนเฉพาะอุปกรณ์เพื่อบันทึกโปรเจ็กต์ VEXcode GO.
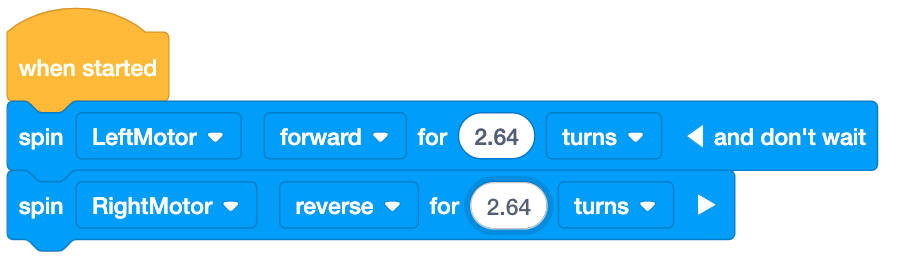
- เมื่อนักเรียนพร้อมแล้ว จะ ป้อนโซลูชัน ของตนลงในพารามิเตอร์ของบล็อก [หมุนสำหรับ]
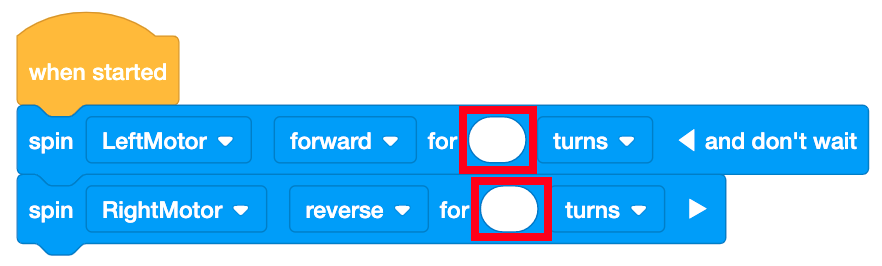
ป้อนโซลูชันลงในพารามิเตอร์เพื่อทดสอบ - เมื่อนักเรียนป้อนโซลูชันของตน ให้เลือก "เริ่ม" ใน VEXcode GO เพื่อทดสอบโครงการ
เลือก 'เริ่ม' เพื่อทดสอบโครงการ - นักเรียนจะต้องเลือกปุ่ม 'หยุด' ในแถบเครื่องมือ VEXcode GO เพื่อหยุดโครงการ
- จัดสรรเวลาให้นักศึกษาได้ทดสอบโครงการของตนและอัปเดต จากนั้นจึงทดสอบอีกครั้งหากจำเป็น
- สำหรับนักเรียนที่ทำเสร็จเร็วและต้องการความท้าทายเพิ่มเติม ให้พวกเขาทำงานคำนวณจำนวนรอบของล้อที่จำเป็นเพื่อให้หุ่นยนต์หมุนได้ 180 องศา องศา ให้พวกเขาทดสอบและดูว่าพวกเขาสามารถทำคะแนนคณิตศาสตร์ได้หรือไม่
-
อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนในขณะที่พวกเขาทำงานผ่านวิธีการเข้ารหัสหุ่นยนต์เพื่อหมุน
360 องศาด้วยคำถาม เช่น:
- เรากำลังพยายามคำนวณอะไรอยู่?
- ระยะทางรวมทั้งหมดที่หุ่นยนต์ต้องเคลื่อนที่เพื่อหมุน 360 คือเท่าไร เราจะกำหนดสิ่งนี้ได้อย่างไร?
- เมื่อทราบระยะทางทั้งหมดที่หุ่นยนต์ต้องเคลื่อนที่เพื่อหมุน 360 องศา และทราบระยะทางที่หุ่นยนต์เคลื่อนที่ได้ด้วยการหมุนล้อหนึ่งครั้ง แล้วเราจะหาได้อย่างไรว่าล้อแต่ละล้อต้องหมุนกี่รอบเพื่อให้หุ่นยนต์ทั้งหมดหมุน 360 องศา
- คุณป้อนข้อมูลอะไรลงในบล็อค [หมุนเพื่อ] ตัวเลขนี้มาจากไหน?
อำนวยความสะดวกในการแก้ไขปัญหาในขณะที่นักศึกษาทำการทดสอบโครงการของพวกเขา นักเรียนใช้ Code Base เพื่อตรวจสอบโซลูชันของตนเอง และเมื่อทำเช่นนั้น พวกเขาจะต้องแน่ใจว่าได้คำนวณปริมาณที่ถูกต้องที่ล้อต้องหมุน นอกจากนี้พวกเขาจะต้องตรวจสอบว่าได้ป้อนข้อมูลดังกล่าวลงในบล็อค [หมุนสำหรับ] อย่างถูกต้องหรือไม่ ถามคำถามและให้ข้อเสนอแนะในขณะที่นักเรียนทำงาน แต่หลีกเลี่ยงการให้คำตอบแก่นักเรียนในขณะที่คุณอำนวยความสะดวกในการดำเนินกิจกรรมในห้องปฏิบัติการนี้
- ค่าในบล็อค [Spin for] เท่ากับโซลูชันของคุณหรือไม่
- ทศนิยมอยู่ในตำแหน่งที่ถูกต้องหรือเปล่า?
- ค่าในบล็อก [Spin for] ทั้งสองมีค่าเท่ากันหรือไม่
หากฐานโค้ดไม่สามารถหมุนระยะทาง ที่ถูกต้อง และอินพุตทั้งหมดถูกต้อง นั่นหมายความว่าโซลูชัน (จำนวนรอบของล้อที่ต้องการ) ไม่ถูกต้อง แนะนำให้พวกเขาตรวจสอบการคำนวณของพวกเขาหรือลองใช้วิธีอื่นในการหาระยะทางนี้
อาจมีรูปแบบที่แตกต่างกันของวิธีการแก้ปัญหาขึ้นอยู่กับหน่วยการวัดที่ใช้หรือเนื่องมาจากการเปลี่ยนแปลงเมื่อปัดเศษการวัด ต่อไปนี้เป็นตัวอย่างหนึ่งของวิธีแก้ปัญหา
วิธีแก้ปัญหาที่เป็นไปได้ - เตือนใจเตือนใจนักเรียนว่าอาจต้องใช้ความพยายามหลายครั้งจึงจะทำให้โครงการของพวกเขาสำเร็จ
การลองผิดลองถูกเป็นส่วนหนึ่งของกระบวนการทดสอบ และเป็นตัวบ่งชี้ที่สำคัญว่าคณิตศาสตร์ของพวกเขาถูกต้องหรือไม่
- หุ่นยนต์ของคุณไปไกลเกินไปหรือเปล่า? หรือไม่ไกลพอ? คุณคิดว่าทำไมถึงเกิดขึ้น?
-
ถามถามนักเรียนว่าการเขียนโค้ดให้หุ่นยนต์เคลื่อนไหวอย่างแม่นยำสามารถเป็นประโยชน์ในด้านอื่นๆ
ได้อย่างไร
- จะเกิดอะไรขึ้นหากคุณเขียนโค้ดให้หุ่นยนต์ของคุณขับผ่านเขาวงกต เหตุใดการที่หุ่นยนต์จะหมุนได้อย่างแม่นยำจึงมีความสำคัญ?
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
ทันทีที่กลุ่ม แต่ละกลุ่มมีเวลาคำนวณจำนวนรอบของล้อที่จำเป็นในการหมุน 360 องศา และทดสอบคำตอบของพวกเขา ให้มารวมตัวกันเพื่อสนทนาสั้นๆ
นี่เป็นเวลาที่จะตรวจสอบความเข้าใจและแก้ไขความเข้าใจผิดใดๆ ที่นักเรียนอาจมีก่อนที่จะดำเนินการต่อไปในส่วนที่ 2 เปิดโอกาสให้กลุ่มนักเรียนได้แบ่งปันแนวทางแก้ปัญหาและวิธีการของตนเองด้วยคำถาม เช่น:
- เมื่อทราบว่าหุ่นยนต์จะต้องหมุน 360 องศา คุณจะกำหนดจำนวนรอบของล้อที่จำเป็นได้อย่างไร
- คุณสามารถแสดงและอธิบายการคำนวณของคุณได้ไหม
ตอนที่ 2 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนทราบว่าพวกเขาจะนำสิ่งที่เรียนรู้ในส่วนที่ 1 ของการเล่นไปใช้
เพื่อให้หุ่นยนต์หมุน 180 องศาแทนที่จะเป็น 360 องศา โดยใช้บล็อก [หมุนสำหรับ]
เพื่อทำเส้นทางขบวนพาเหรดให้สำเร็จ พวกเขาจะใช้โซลูชันจาก Lab 4
เพื่อให้หุ่นยนต์ขับไปข้างหน้าในระยะทางที่ถูกต้องในเส้นทางขบวนพาเหรด
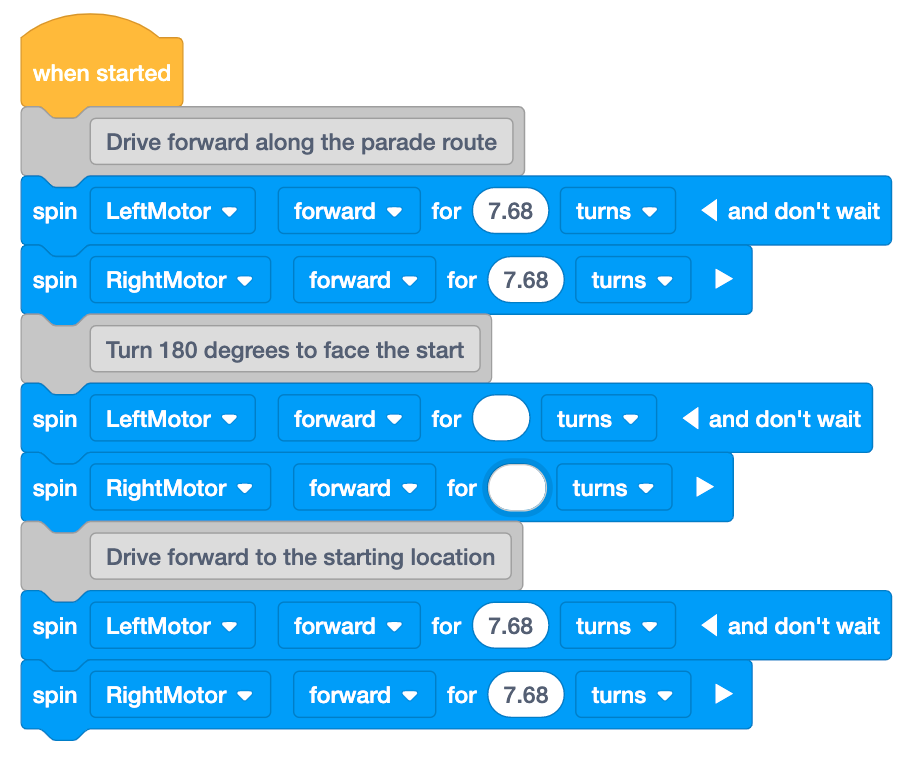
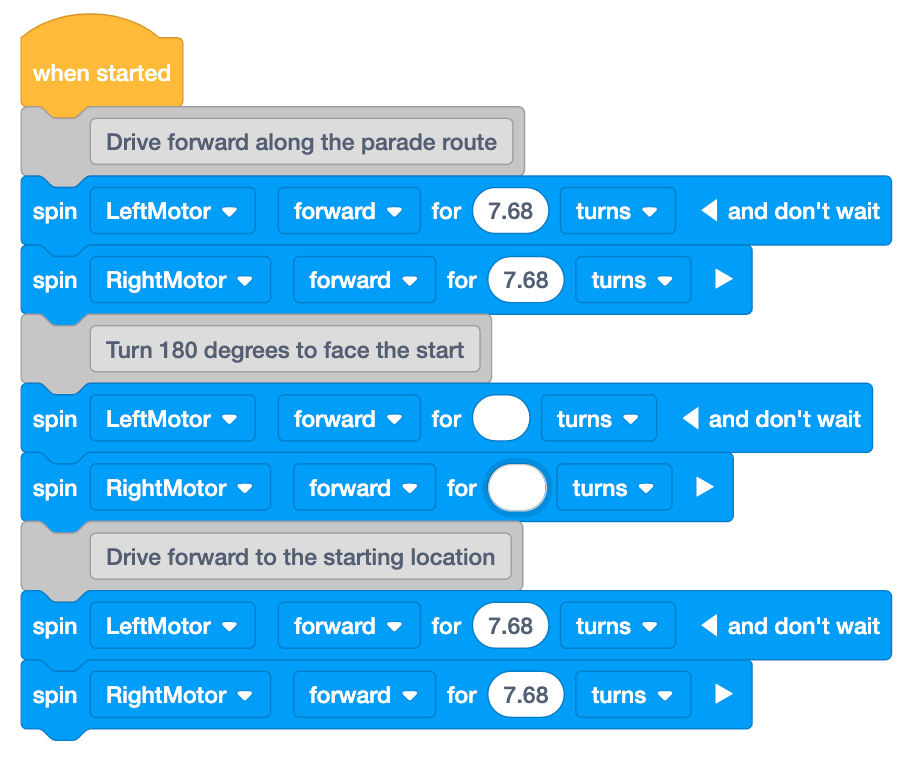
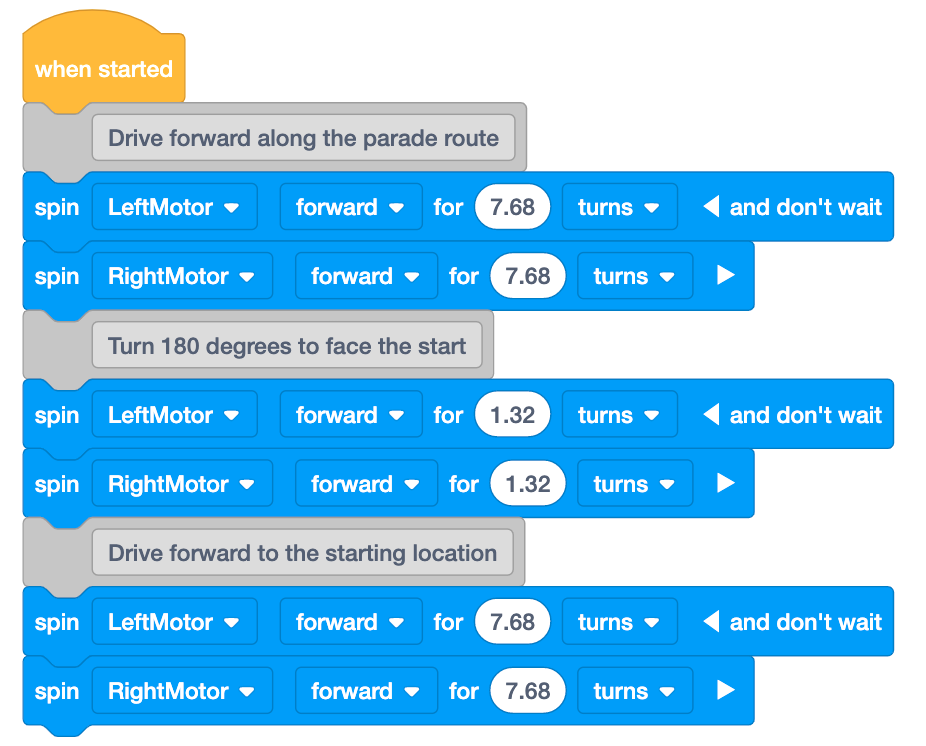
แอนิเมชั่นข้างล่างจะแสดงให้เห็นวิธีที่หุ่นยนต์ควรเคลื่อนไหวเมื่อเสร็จสิ้นเส้นทางขบวนพาเหรด: ขับไปข้างหน้าเป็นระยะทาง 48 นิ้ว (122 ซม.) จากนั้นหมุนไป 180 องศา จากนั้นขับไปข้างหน้าเป็นระยะทาง 48 นิ้ว (122 ซม.) เพื่อกลับสู่จุดเริ่มต้น นี่ใช้เทมเพลตโค้ดด้านบน
ไฟล์วีดีโอ - โมเดลโมเดลสำหรับนักเรียนที่จะเริ่มต้นโปรเจ็กต์ใน VEXcode GO
- เริ่มต้นโดยให้เด็กนักเรียนเปิดเทมเพลตเส้นทางขบวนพาเหรด
- โปรดทราบว่ามีการรวมบล็อค [ความคิดเห็น] ไว้เพื่ออธิบาย ส่วนของโครงการ หากคุณต้องการที่จะเรียนรู้ เพิ่มเติมเกี่ยวกับความคิดเห็นใน VEXcode GO sนี่คือบทความนี้.
- โปรดทราบด้วยว่าชุดพารามิเตอร์แรกและชุดสุดท้ายได้รับการเติมค่าตามโซลูชันจากแล็บ 4 เพื่อขับเคลื่อนหุ่นยนต์ 48 นิ้ว (122 ซม.) ซึ่งเป็นความยาวของเส้นทางขบวนพาเหรด ค่าเหล่านี้อาจแตกต่างจากโซลูชันของนักเรียนในแล็บ 4 เล็กน้อยเนื่องจากความแตกต่างเล็กน้อยในการวัดการปัดเศษ
เทมเพลตเส้นทางขบวนพาเหรด - นักเรียนจะต้องคำนวณจำนวนรอบของล้อที่ต้องหมุน เพื่อหมุน 180 องศา และป้อนค่าเหล่านั้นลงในบล็อก บล็อกที่เน้นไว้
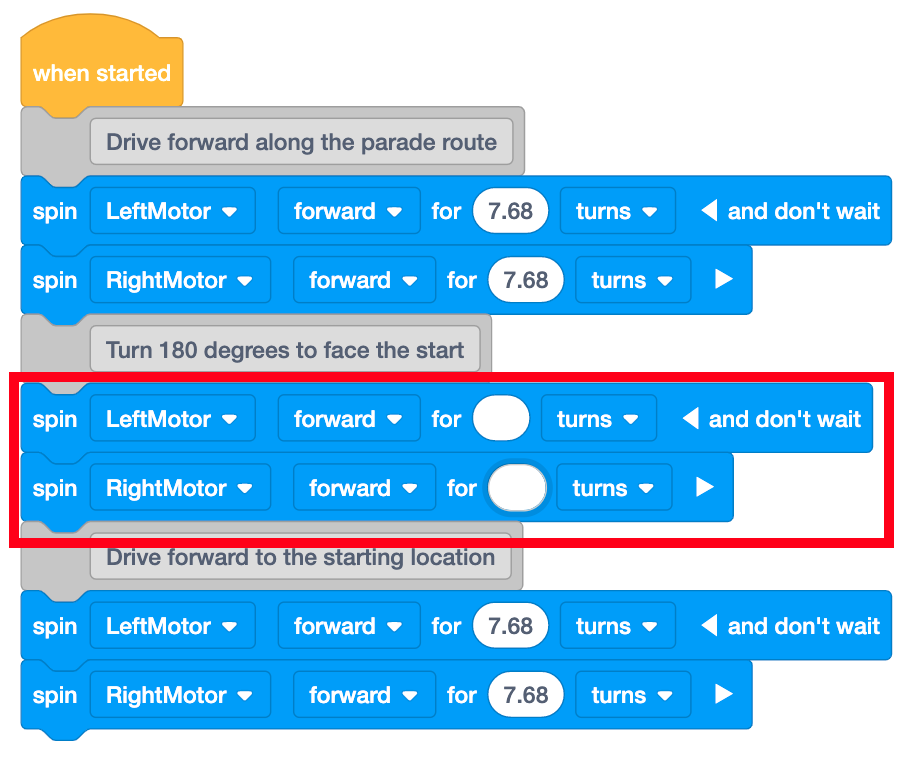
อินพุตของล้อหมุนที่จำเป็นเพื่อหมุน 180 องศา - เมื่อนักเรียนป้อนค่าทั้งหมดแล้ว พวกเขาก็พร้อมที่จะบันทึกโครงการและทดสอบโซลูชั่น ด้วยหุ่นยนต์ของพวกเขา
- ให้เด็กนักเรียนตั้งชื่อโปรเจ็กต์ของตนเองว่า Parade Float Lab 5 และบันทึกลงในอุปกรณ์ของตน ดูสิ่งนี้ ส่วนของบทความเกี่ยวกับขั้นตอนเฉพาะอุปกรณ์เพื่อบันทึกโปรเจ็กต์ VEXcode GO.
แบบจำลองสำหรับให้นักเรียนทดสอบโครงการของตนบนเส้นทางขบวนพาเหรด
- ขั้นแรก ให้พวกเขาดูวิธีการวางหุ่นยนต์ที่จุดเริ่มต้น ตามที่แสดงในภาพด้านล่าง ใช้ขาตั้งสีน้ำเงินบนล้อเพื่อช่วยจัดตำแหน่งศูนย์กลางของล้อให้ตรงกับขอบด้านหน้าของเส้นเริ่มต้น
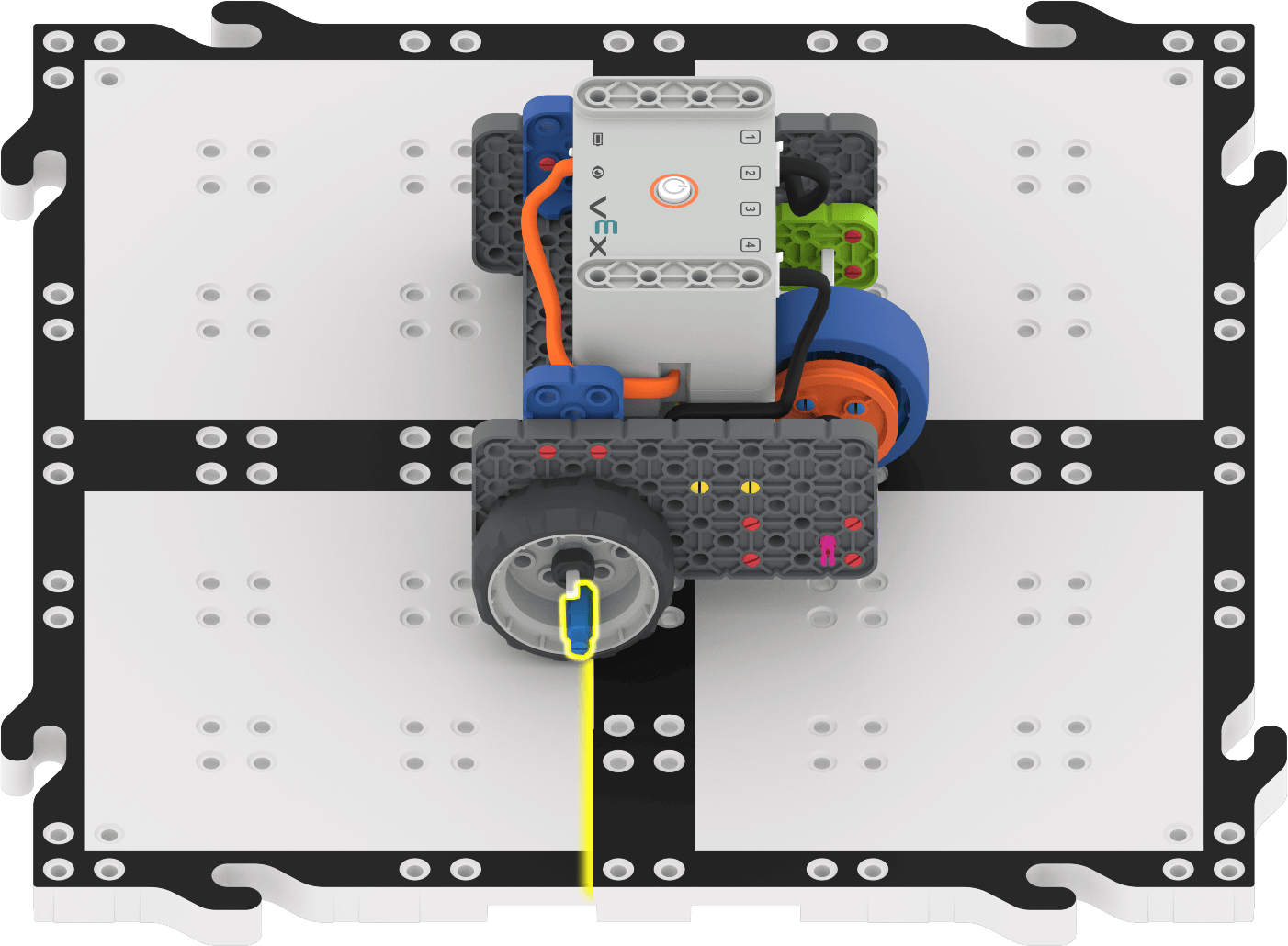
ใช้ Blue Standoff เพื่อช่วยจัดตำแหน่งเพลาล้อและส่วนหน้าของเส้นเริ่มต้น - เมื่อฐานโค้ดพร้อมแล้ว ให้เลือก "เริ่ม" ใน VEXcode GO เพื่อทดสอบโครงการ
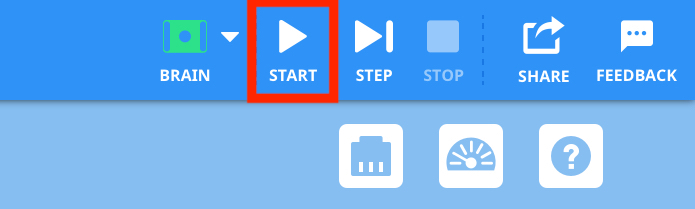
เลือกเริ่มทดสอบโครงการ - นักเรียนจะต้องเลือกปุ่ม 'หยุด' ในแถบเครื่องมือ VEXcode GO เพื่อหยุดโครงการ
- จัดสรรเวลาให้นักศึกษาได้ทดสอบโครงการของตนและอัปเดต และทดสอบอีกครั้งหากจำเป็น
- เมื่อนักเรียนได้มีโอกาสทดสอบโครงการของตนในเส้นทางขบวนพาเหรด ให้นักเรียนเพิ่ม ที่แนบมากับขบวนพาเหรดลงในฐานโค้ด และเข้าร่วมขบวนพาเหรดทั้งชั้นเรียน รอบ โดยทุกกลุ่มจะผลัดกันดำเนินโครงการของตน
- สำหรับนักเรียนที่ทำเสร็จเร็วและต้องการความท้าทายเพิ่มเติม
ให้นักเรียนเขียนโค้ดหุ่นยนต์ให้หมุนได้ในปริมาณที่แตกต่างกันบนเส้นทางขบวนพาเหรด
ให้สถานการณ์ต่อไปนี้กับนักเรียน:
- ถ้าเส้นทางขบวนพาเหรดเลี้ยว 90 องศาจะเกิดอะไรขึ้น? การคำนวณของคุณจะเปลี่ยนไปอย่างไร? ทดสอบแล้วดูว่าคุณสามารถทำคณิตศาสตร์ได้สำเร็จหรือไม่
- ขบวนพาเหรดยืดเยื้อ! เมื่อสิ้นสุดโครงการของคุณ คุณต้องเลี้ยวซ้าย 90 องศาเพื่อเดินทางต่อบนเส้นทางขบวนพาเหรด เพิ่มบล็อก [มอเตอร์หมุน] เพิ่มเติมสองบล็อกที่ด้านล่างของโปรเจ็กต์ของคุณและทำการคำนวณ
- เริ่มต้นโดยให้เด็กนักเรียนเปิดเทมเพลตเส้นทางขบวนพาเหรด
-
อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนในขณะที่พวกเขาสร้างและทดสอบโครงการของพวกเขาด้วยคำถามเช่น:
- คุณต้องเปลี่ยนแปลงอะไรบ้างในการคำนวณของคุณจาก Play Part 1 เพื่อให้หุ่นยนต์หมุน 180 องศาแทนที่จะเป็น 360 องศา?
- ความสัมพันธ์ระหว่าง 2 รอบนี้คืออะไร? มันส่งผลต่อการคำนวณของคุณอย่างไร?
อำนวยความสะดวกในการแก้ไขปัญหาในขณะที่นักศึกษาทำการทดสอบโครงการของพวกเขา นักเรียนกำลังใช้โค้ดฐานเพื่อตรวจสอบการคำนวณของพวกเขา และพวกเขาจะต้องตรวจสอบให้แน่ใจว่าได้คำนวณจำนวนรอบที่ถูกต้องที่จำเป็นในการขับไปถึงจุดสิ้นสุดของเส้นทางขบวนพาเหรดและเลี้ยว 180 องศา จากนั้นป้อนข้อมูลดังกล่าวลงในบล็อก [หมุนสำหรับ] อย่างถูกต้อง ถามคำถามและให้ข้อเสนอแนะในขณะที่นักเรียนทำงาน แต่หลีกเลี่ยงการให้คำตอบแก่นักเรียนในขณะที่คุณอำนวยความสะดวกในการทำกิจกรรมในห้องปฏิบัติการนี้
อาจมีการเปลี่ยนแปลงของวิธีการแก้ปัญหาขึ้นอยู่กับหน่วยการวัดที่ใช้หรืออาจมีการเปลี่ยนแปลงเล็กน้อยเมื่อปัดเศษการวัด ต่อไปนี้เป็นตัวอย่างหนึ่งของวิธีแก้ปัญหา
วิธีแก้ปัญหาที่เป็นไปได้ 5 ของแล็บ - เตือนเตือนนักเรียนว่าอาจต้องใช้ความพยายามหลายครั้งเพื่อให้ Code Base
ของพวกเขาทำตามที่ตั้งใจไว้ การลองหลายครั้งเป็นส่วนหนึ่งของกระบวนการทดสอบ
และเป็นตัวบ่งชี้ที่สำคัญว่าคณิตศาสตร์ของพวกเขาถูกต้องหรือไม่ ขณะที่พวกเขาดำเนินการโครงการคณิตศาสตร์และ
VEXcode GO ให้ถามคำถามต่อไปนี้กับพวกเขา
- Code Base ของคุณเปลี่ยนไปแค่ไหนเมื่อคุณรันโปรเจ็กต์ของคุณ? นั่นมันมากเกินไปหรือน้อยเกินไปหรือแค่พอเหมาะ
- หากฐานรหัสของคุณหมุนมากเกินไปหรือน้อยเกินไป คุณจะตรวจสอบอะไรได้บ้างในการคำนวณของคุณ?
- คุณสามารถตรวจสอบอะไรได้บ้างในโครงการ VEXcode GO ของคุณ?
- ถามขอให้เด็กนักเรียนคิดเกี่ยวกับตัวแปรต่างๆ เช่น
ขนาดล้อหรือระยะการเลี้ยวที่จะส่งผลต่อการคำนวณของพวกเขาหรือไม่
- หากคุณมีหุ่นยนต์ที่มีล้อที่ใหญ่กว่า จำนวนรอบทั้งหมดจะได้รับผลกระทบอย่างไร ทำไมคุณถึงพูดอย่างนั้น?
- หากคุณมีหุ่นยนต์ที่มีล้อขนาดเล็กกว่า จำนวนรอบทั้งหมดจะได้รับผลกระทบอย่างไร ทำไมคุณถึงพูดอย่างนั้น?