
Soutěž
Nyní, když jste nakódovali svého jednoduchého clawbota, abyste řídili a přesunuli kostku, jste připraveni na Clawbot Collector Challenge!
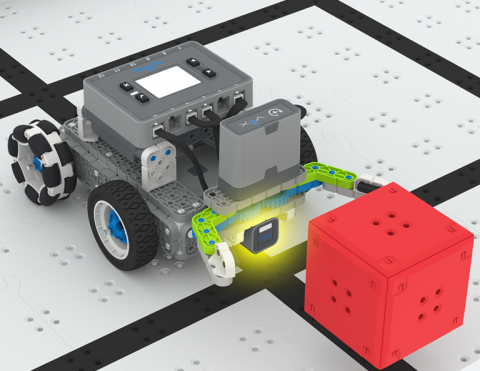
Cílem této časované zkušební výzvy je, aby váš robot autonomně řídil a shromáždil všechny tři kostky na hřišti a vrátil je do startovní zóny v nejrychlejším čase. Podívejte se na animaci níže a podívejte se na příklad, jak by se váš robot mohl pohybovat v úspěšném běhu výzvy.
Pro dokončení Clawbot Collector Challenge postupujte podle kroků v tomto dokumentu. Google / .docx / .pdf
Po dokončení Clawbot Collector Challenge se obraťte na svého učitele. Ujistěte se, že jste zdokumentovali výsledky výzvy ve svém technickém notebooku.
Zabalit odraz
Nyní, když jste zakódovali svého jednoduchého clawbota, aby řídil a pohyboval kostkami, a soutěžili jste ve výzvě Clawbot Collector, je čas zamyslet se nad tím, co jste se v této lekci naučili a udělali. Začni novou stránku ve svém technickém poznámkovém bloku a začni přemýšlet.
Ohodnoťte se jako nováček, učeň nebo odborník na každý z následujících konceptů ve vašem technickém notebooku. Uveďte stručné vysvětlení, proč jste si pro každý koncept dali toto hodnocení:
- Shromažďování a používání dat (například vzdáleností) pro efektivní plánování projektu
- Použití bloků hnacího ústrojí a pohybu v projektu VEXcode IQ pro přesun kostek s jednoduchým Clawbotem
- Kolaborativní rozhodování s mými spoluhráči
Pomocí této tabulky můžete určit, do které kategorie spadáte.
| Expert | Mám pocit, že jsem plně pochopil koncept a mohl bych to naučit někoho jiného. |
| Učeň | Mám pocit, že jsem konceptu rozuměl natolik, abych mohl soutěžit v soutěži. |
| Nováček | Mám pocit, že jsem konceptu nerozuměl a nevím, jak úkol splnit. |
Co bude dál?
V této lekci jste použili VEXcode IQ pro kódování vašeho Simple Clawbot pro přesun tří kostek.
V příští lekci budete:
- Přečtěte si o optickém senzoru a o tom, jak jej lze použít k detekci barev.
- Přidejte do robota optický senzor a naučte se ho kódovat pomocí bloků ve VEXcode IQ.
- Soutěžte v soutěži Treasure Mover Challenge!
Zvolte < Návrat k lekcím pro návrat k přehledu lekce.
Vyberte Další lekci > a pokračujte lekcí 3 a prozkoumejte, jak může přidání optického senzoru umožnit vašemu jednoduchému klawbotovi detekovat objekty a barvy.