
競争する
これで、Simple Clawbot を駆動するコードを 作成し、立方体を 動かすことができたので、Clawbot Collector Challenge の準備は完了です。
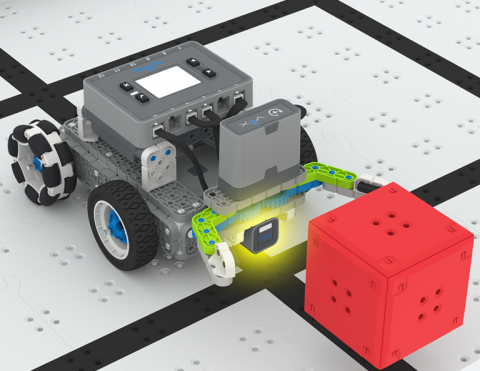
このタイムトライアルチャレンジの目標は、ロボット 自律的に運転してフィールド上の 3 つのキューブすべてを収集し、最速の時間で開始ゾーンに戻すことです。 以下のアニメーションを見て、ロボットがチャレンジを成功裏に実行する方法の例を確認してください。
この文書の手順に従って、Clawbot Collector Challenge を完了してください。 Google / .docx / .pdf
Clawbot Collector Challenge を完了したら、教師に確認してください。 チャレンジの結果をエンジニアリング ノートに必ず文書化してください。
まとめの振り返り
Simple Clawbot をコーディングしてキューブを駆動し、 移動するようにし、Clawbot Collector チャレンジに参加しました。このレッスンで学習し実行したことを振り返るときが来ました。 エンジニアリング ノートブックで新しいページを開始して、考察を始めます。
エンジニアリング ノートブックで、次の各概念について、初心者、見習い、または専門家として自分自身を評価してください。 各コンセプトに対してその評価を与えた理由を簡単に説明してください。
- データ (距離など) を収集して使用する プロジェクトを効果的に計画するため
- VEXcode IQ プロジェクトで Drivetrain ブロックと Motion ブロックを使用して、Simple Clawbot でキューブを移動する
- チームメイトと協力して意思決定を行う
この表は、自分がどのカテゴリに該当するかを判断するのに役立ちます。
|
専門家 |
この概念を完全に理解したので、これを他の人に教えることができたと感じています。 |
| 見習い | チャレンジに参加するのに十分なコンセプトを理解できたと感じています。 |
| 初心者 | コンセプトを理解していなかったように感じ、課題を完了する方法がわかりません。 |
次は何ですか?
このレッスンでは、VEXcode IQ を使用して、3 つの立方体を移動するように Simple Clawbot をコーディングしました。
次のレッスンでは、次のことを行います:
- 光学センサーとそれを使用して色を検出する方法について学びます。
- 光学センサーをロボットに追加し、VEXcode IQ のブロックを使用してコーディングする方法を学びます。
- Treasure Mover チャレンジに参加してください!
< レッスンに戻る を選択して、レッスンの概要に戻ります。
次のレッスン > を選択してレッスン 3 に進み、光学センサーを追加することで Simple Clawbot がオブジェクトと色を検出できるようにする方法を調べます。