
Competere
Ora che hai codificato il tuo Simple Clawbot per guidare e sposta un cubo, sei pronto per la sfida del collezionista di Clawbot!
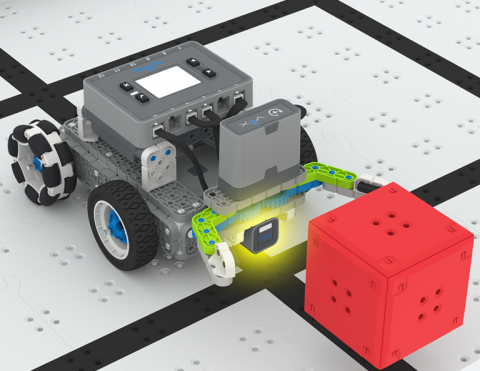
L'obiettivo di questa sfida a tempo è far sì il tuo robot guidi e raccolga in modo autonomo tutti e tre i cubi campo e li riporti alla zona di partenza nel tempo più breve possibile. Guarda l'animazione qui sotto per vedere un esempio di come potrebbe muoversi il tuo robot in una sfida di successo.
Segui i passaggi in questo documento per completare la sfida del collezionista di Clawbot. Google / .docx / .pdf
Una volta completata la sfida del collezionista di Clawbot, contatta il tuo insegnante. Assicurati di aver documentato i risultati della sfida nel tuo quaderno di progettazione.
Conclusione Riflessione
Ora che hai programmato il tuo Simple Clawbot per guidare e spostare cubi e hai partecipato alla sfida Clawbot Collector, è il momento di riflettere su ciò che hai imparato e fatto in questa lezione. Inizia una nuova pagina del tuo quaderno di ingegneria per iniziare la tua riflessione.
Valuta te stesso come principiante, apprendista o esperto per ciascuno dei seguenti concetti nel tuo quaderno di ingegneria. Fornisci una breve spiegazione del motivo per cui hai assegnato quella valutazione a ciascun concetto:
- Raccolta e utilizzo dati (come le distanze) per pianificare efficacemente un progetto
- Utilizzo dei blocchi Drivetrain e Motion in un progetto VEXcode IQ per spostare i cubi con Simple Clawbot
- Decisioni collaborative con i miei compagni di squadra
Utilizza questa tabella per aiutarti a determinare in quale categoria rientri.
| Esperto | Ritengo di aver compreso appieno il concetto e di poterlo insegnare a qualcun altro. |
| Apprendista | Ritengo di aver compreso il concetto a sufficienza per poter partecipare alla sfida. |
| Novizio | Ho la sensazione di non aver capito il concetto e di non sapere come portare a termine la sfida. |
Cosa c'è dopo?
In questa lezione hai utilizzato VEXcode IQ per programmare il tuo Simple Clawbot affinché sposti tre cubi.
Nella prossima lezione imparerai:
- Scopri di più sul sensore ottico e su come può essere utilizzato per rilevare i colori.
- Aggiungi il sensore ottico al tuo robot e impara a codificarlo utilizzando i blocchi in VEXcode IQ.
- Partecipa alla sfida Treasure Mover!
Seleziona < Torna alle lezioni per tornare alla panoramica della lezione.
Seleziona Lezione successiva > per passare alla Lezione 3 e scoprire come l'aggiunta di un sensore ottico può consentire al tuo Simple Clawbot di rilevare oggetti e colori.