
แข่งขัน
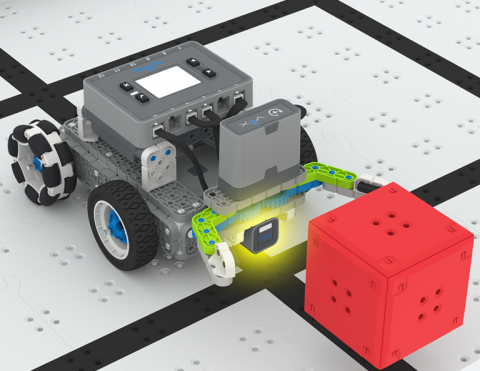
ตอนนี้คุณได้เขียนโค้ด Simple Clawbot ไว้ ในการขับและ ในการเคลื่อนลูกบาศก์แล้ว คุณก็พร้อมสำหรับ Clawbot Collector Challenge แล้ว!
เป้าหมายของความท้าทายแบบจับเวลานี้คือให้ ยนต์ของคุณขับเคลื่อนโดยอัตโนมัติและรวบรวมลูกบาศก์ทั้งสามลูกบนสนามและนำกลับมาที่โซนเริ่มต้นให้ได้เร็วที่สุด ชมแอนิเมชั่นด้านล่างเพื่อดูตัวอย่างว่าหุ่นยนต์ของคุณเคลื่อนที่ได้อย่างไรในการแข่งขันที่ประสบความสำเร็จ
ปฏิบัติตามขั้นตอนในเอกสารนี้เพื่อทำ Clawbot Collector Challenge ให้สำเร็จ Google / .docx / .pdf
เมื่อคุณทำ Clawbot Collector Challenge เสร็จแล้ว ให้ไปติดต่อครูของคุณ ให้แน่ใจว่าคุณได้บันทึกผลลัพธ์ของความท้าทายไว้ในสมุดบันทึกวิศวกรรมของคุณแล้ว
สรุปการสะท้อนความคิด
ตอนนี้คุณได้เขียนโค้ดให้ Simple Clawbot ของคุณขับเคลื่อนโดย การเคลื่อนที่ และเข้าแข่งขันในการแข่งขัน Clawbot Collector แล้ว ได้เวลาทบทวนสิ่งที่คุณได้เรียนรู้และทำในบทเรียนนี้ เริ่มหน้าใหม่ในสมุดบันทึกวิศวกรรมของคุณเพื่อเริ่มต้นการสะท้อนความคิดของคุณ
ให้คะแนนตัวเองในฐานะมือใหม่ ผู้ฝึกหัด หรือผู้เชี่ยวชาญในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆ ว่าเหตุใดคุณจึงให้คะแนนตัวเองในแต่ละแนวคิดดังนี้:
- การรวบรวมและใช้ข้อมูล (เช่น ระยะทาง) เพื่อวางแผนโครงการอย่างมีประสิทธิภาพ
- การใช้บล็อก Drivetrain และ Motion ในโครงการ VEXcode IQ เพื่อเคลื่อนย้ายลูกบาศก์ด้วย Simple Clawbot
- การตัดสินใจร่วมกันกับเพื่อนร่วมทีมของฉัน
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
| ผู้เชี่ยวชาญ | ฉันคิดว่าฉันเข้าใจแนวคิดนี้เป็นอย่างดีและสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| ลูกจ้างฝึกงาน | ฉันรู้สึกว่าตนเองเข้าใจแนวคิดเพียงพอที่จะแข่งขันความท้าทายนี้ได้ |
| สามเณร | ฉันรู้สึกว่าฉันไม่เข้าใจคอนเซปต์และไม่รู้ว่าจะทำความท้าทายนี้ให้สำเร็จได้อย่างไร |
ต่อไปจะเป็นอะไร?
ในบทเรียนนี้ คุณจะใช้ VEXcode IQ ในการเขียนโค้ด Simple Clawbot เพื่อเคลื่อนย้ายลูกบาศก์ 3 ลูก
ในบทเรียนถัดไปคุณจะ:
- เรียนรู้เกี่ยวกับเซ็นเซอร์ออปติคอลและวิธีใช้เพื่อตรวจจับสี
- เพิ่มเซนเซอร์ออปติคอลให้กับหุ่นยนต์ของคุณ และเรียนรู้วิธีการเข้ารหัสโดยใช้บล็อกใน VEXcode IQ
- ร่วมแข่งขันใน Treasure Mover Challenge!
เลือก < กลับไปที่บทเรียน เพื่อกลับไปยังภาพรวมบทเรียน
เลือก ถัดไป บทเรียน > เพื่อไปยังบทเรียนที่ 3 และสำรวจว่าการเพิ่มเซนเซอร์ออปติคัลจะช่วยให้ Simple Clawbot ตรวจจับวัตถุและสีได้อย่างไร