
Lektion 2: Parameter im Antrieb für Befehl ändern
Der VR-Roboter hat im letzten Projekt die Mittelburg nicht berührt. Es muss weiter reisen. Passen Sie die Parameter an, testen Sie sie und beobachten Sie, wie der VR-Roboter die mittlere Burg umstößt!
-
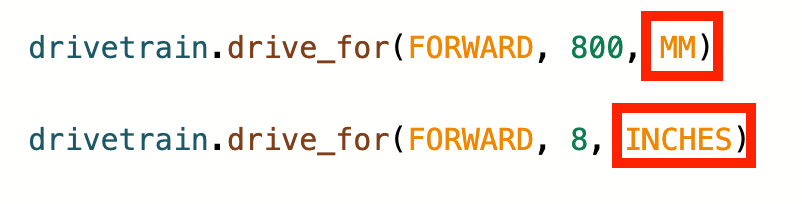
Stellen Sie die Distanz ein, über die sich der VR-Roboter bewegen wird, indem Sie den Wert „800“ als zweiten Parameter im Befehl drive_for eingeben. Ihr Projekt sollte nun so aussehen:
# Projektcode in "main" hinzufügen def main(): drivetrain.drive_for(FORWARD, 800, MM)
Zur Kenntnisnahme
Der Befehl drive_for kann sowohl ganze Zahlen (Integers) als auch Dezimalzahlen (Floats) akzeptieren. Die Einheiten können auch von Millimeter (mm) auf Zoll geändert werden.
- Starten Sie das Projekt.

-
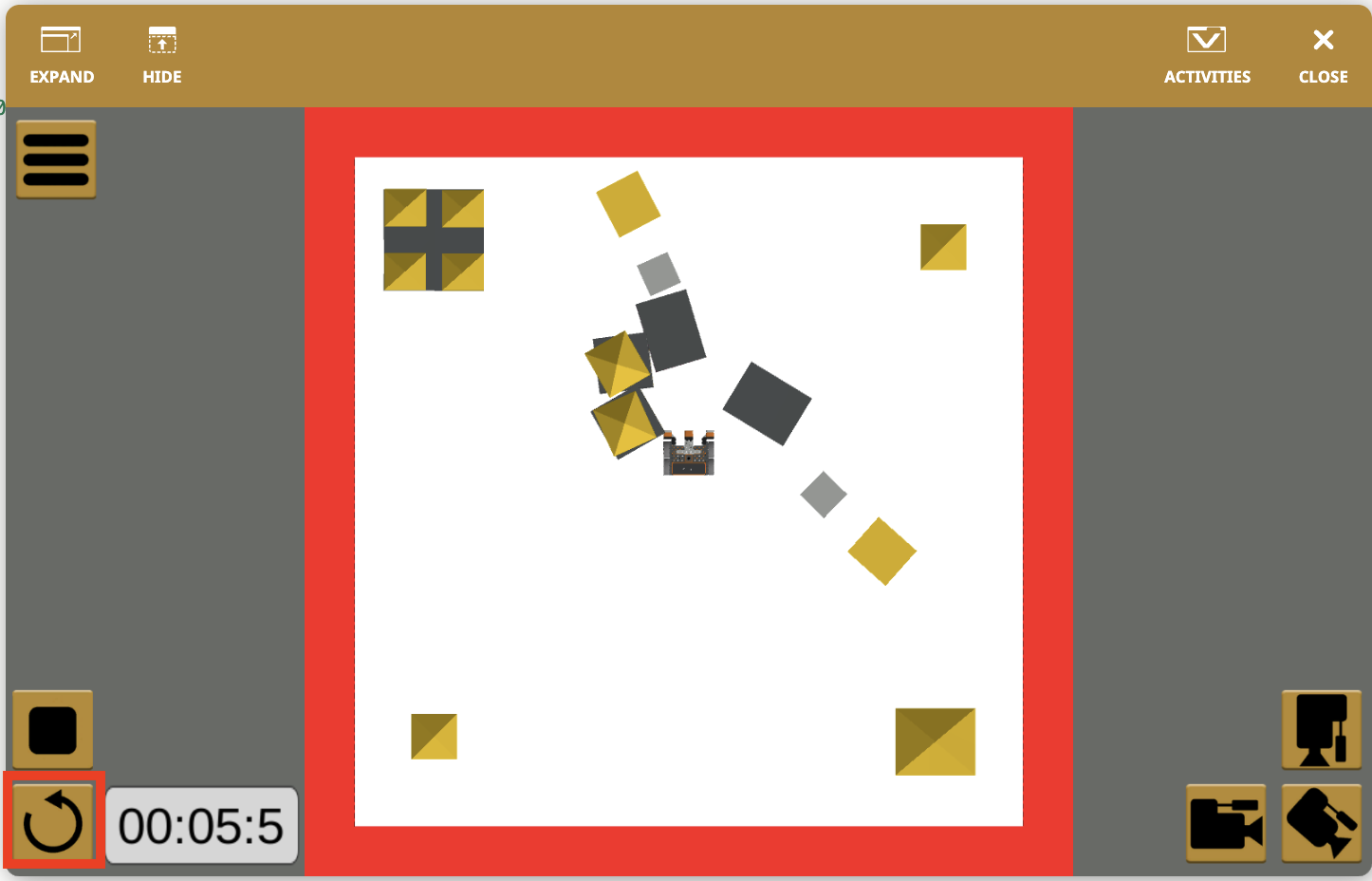
Der VR-Roboter kollidiert mit der mittleren Burg und stößt Teile davon um.

- Wählen Sie die Schaltfläche "Reset", um den Spielplatz zurückzusetzen.
Der VR-Roboter muss nun in die Ausgangsposition zurückkehren. Verwenden Sie einen zusätzlichen drive_ for-Befehl und ändern Sie die Parameter, damit er rückwärts fährt, um in die Ausgangsposition zurückzukehren. -
Fügen Sie dem VEXcode VR-Projekt einen zweiten Befehl drive_for hinzu und ändern Sie die Richtung von „VORWÄRTS“ in „RÜCKWÄRTS“. Ihr Projekt sollte nun so aussehen:
# Projektcode in "main" def main() einfügen: drivetrain.drive_for (VORWÄRTS, 800, MM) drivetrain.drive_for(RÜCKWÄRTS, 200, MM) -
Stellen Sie sicher, dass der Abstandswert der gleiche ist wie der erste drive_for-Befehl, 800 Millimeter (mm), damit er in die Ausgangsposition zurückkehrt. Ihr Projekt sollte nun so aussehen:
# Projektcode in "main" def main() einfügen: drivetrain.drive_for (VORWÄRTS, 800, MM) drivetrain.drive_for(RÜCKWÄRTS, 800, MM) - Wählen Sie die Schaltfläche „Start“ und führen Sie das Projekt aus.

- Der VR-Roboter bewegt sich 800 Millimeter (mm) vorwärts und rückwärts und kehrt in die Ausgangsposition zurück.

Hinweis: Du hast den ersten Teil der Castle-Crasher-Herausforderung erfolgreich abgeschlossen! Auch wenn nicht alle vier Teile der Mittelburg vollständig umgestürzt sind, wenn sie leicht versetzt sind, ist das akzeptabel.
Zur Kenntnisnahme
Um einen VR-Roboter mit unterschiedlichen Geschwindigkeiten vorwärts und rückwärts fahren zu lassen, kann die Fahrgeschwindigkeit mit dem Befehl set_drive_velocity erhöht oder verringert werden. Der Befehl set_drive_velocity akzeptiert einen Bereich von 0 - 100 für den Geschwindigkeitsparameter. Die Standardgeschwindigkeit beträgt 50 %. Die Änderung der Geschwindigkeit gilt für alle nachfolgenden Drivetrain-Befehle.
drivetrain.set_drive_velocity(50, PROZENT)Speichern Sie Ihr Projekt
Um Ihr Projekt zu speichern, wählen Sie "Speichern unter" im Dropdown-Menü "Datei".
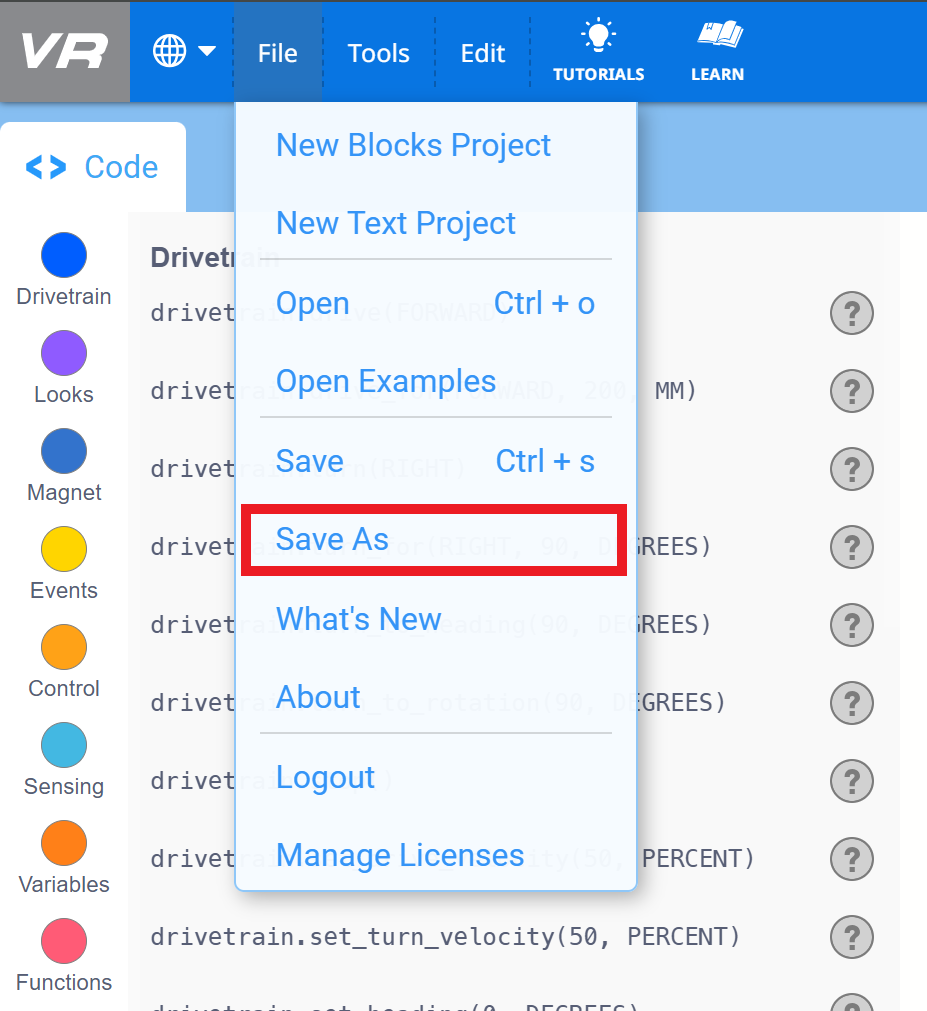
Nach dem Speichern wird das Projekt im Ordner Downloads Ihres Geräts als .vrpython-Datei angezeigt.
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf