
บทที่ 2: เปลี่ยนพารามิเตอร์ในไดรฟ์สำหรับคำสั่ง
หุ่นยนต์ VR ไม่ได้แตะต้องปราสาทตรงกลางในโครงการล่าสุด ต้องเดินทางไกลกว่านี้ ปรับพารามิเตอร์ทดสอบและดูหุ่นยนต์ VR เคาะปราสาทตรงกลาง!
-
ตั้งค่าระยะทางที่หุ่นยนต์ VR จะเคลื่อนที่โดยป้อนค่า "800" เป็นพารามิเตอร์ที่สองในคำสั่ง drive_for ตอนนี้โปรเจกต์ของคุณควรมีลักษณะดังนี้:
# เพิ่มรหัสโครงการใน "main" def main (): drivetrain.drive_for (FORWARD, 800, MM)
สำหรับข้อมูลของคุณ
คำสั่ง drive_for สามารถรับทั้งจำนวนเต็ม (จำนวนเต็ม) และทศนิยม (จำนวนทศนิยมแบบทศนิยมลอยตัว) ได้ นอกจากนี้ยังสามารถเปลี่ยนหน่วยจากมิลลิเมตร (มม.) เป็นนิ้วได้

- เริ่มโปรเจกต์

-
หุ่นยนต์ VR จะชนกับปราสาทตรงกลางและทุบชิ้นส่วนของมัน

- เลือกปุ่ม "รีเซ็ต" เพื่อรีเซ็ตสนามเด็กเล่นตอน
นี้หุ่นยนต์ VR ต้องกลับไปที่ตำแหน่งเริ่มต้น ใช้คำสั่ง drive_for เพิ่มเติม และเปลี่ยนพารามิเตอร์เพื่อทำให้ขับถอยหลังเพื่อกลับสู่ตำแหน่งเริ่มต้น -
เพิ่มคำสั่ง drive_for ที่สองลงในโปรเจ็กต์ VEXcode VR และเปลี่ยนทิศทางจาก “FORWARD” เป็น “REVERSE” ตอนนี้โปรเจกต์ของคุณควรมีลักษณะดังนี้:
# เพิ่มรหัสโครงการใน "main" def main (): drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for (REVERSE, 200, MM) -
ตรวจสอบให้แน่ใจว่าค่าระยะทางจะเท่ากับคำสั่ง drive_for แรก ซึ่งคือ 800 มิลลิเมตร (มม.) เพื่อให้สามารถกลับสู่ตำแหน่งเริ่มต้นได้ ตอนนี้โปรเจกต์ของคุณควรมีลักษณะดังนี้:
# เพิ่มรหัสโครงการใน "main" def main (): drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for (REVERSE, 800, MM) - เลือกปุ่ม "เริ่ม" และเรียกใช้โปรเจกต์

- หุ่นยนต์ VR จะเคลื่อนที่ไปข้างหน้าและข้างหลังเป็นระยะ 800 มิลลิเมตร (มม.) กลับสู่ตำแหน่งเริ่มต้น

หมายเหตุ: คุณทำส่วนแรกของการท้าทาย Castle Crasher สำเร็จแล้ว! แม้ว่าทั้งสี่ส่วนของปราสาทตรงกลางจะไม่ได้รับการกระแทกอย่างสมบูรณ์หากพวกเขาพลัดถิ่นเล็กน้อยนั่นก็เป็นที่ยอมรับได้
สำหรับข้อมูลของคุณ
ในการทำให้หุ่นยนต์ VR ขับเคลื่อนไปข้างหน้าและถอยหลังด้วยความเร็วที่แตกต่างกัน สามารถเพิ่มหรือลดความเร็วในการขับเคลื่อนได้โดยใช้คำสั่ง set_drive_velocity คำสั่ง set_drive_velocity ยอมรับช่วงตั้งแต่ 0 ถึง 100 สำหรับพารามิเตอร์ความเร็ว ความเร็วเริ่มต้นคือ 50% การเปลี่ยนความเร็วจะนำไปใช้กับคำสั่ง Drivetrain ที่ตามมา
drivetrain.set_drive_velocity (50 เปอร์เซ็นต์)บันทึกโปรเจกต์ของคุณ
หากต้องการบันทึกโปรเจกต์ให้เลือก “บันทึกเป็น” ในเมนูแบบเลื่อนลง “ไฟล์”
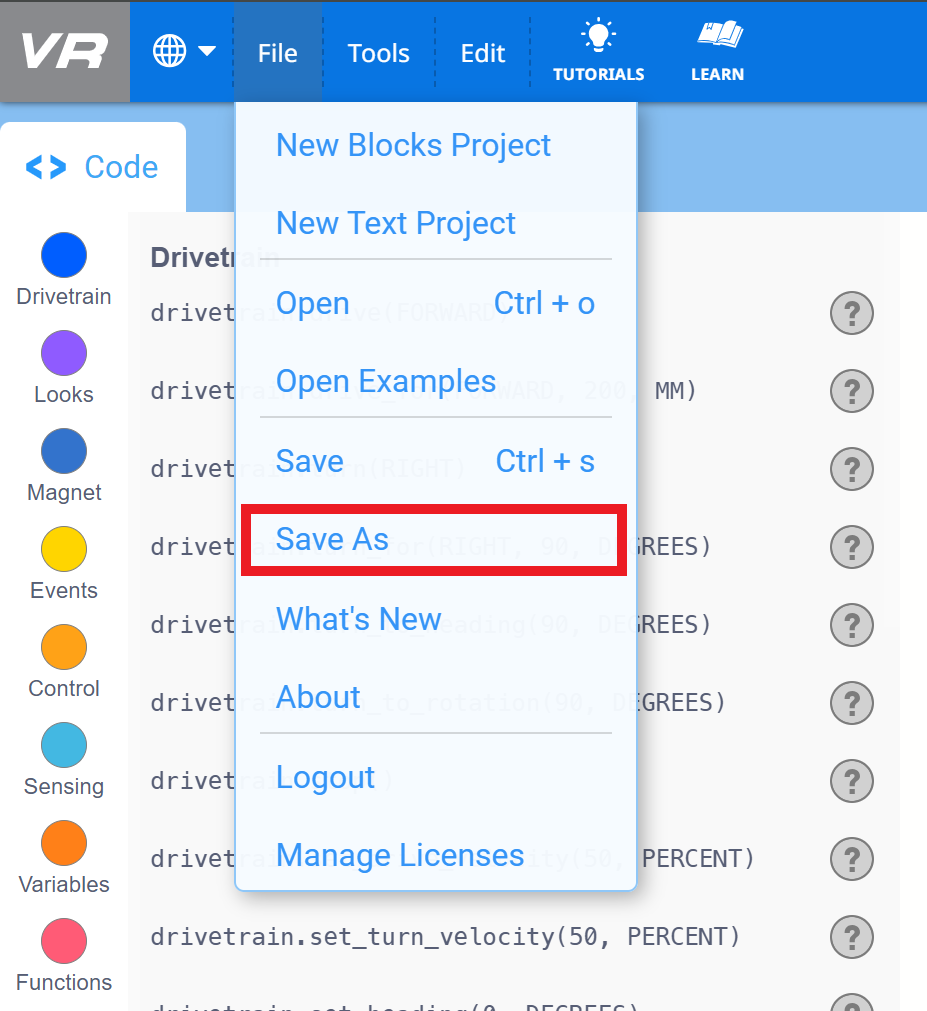
เมื่อบันทึกแล้วโปรเจกต์จะปรากฏในโฟลเดอร์ดาวน์โหลดของอุปกรณ์ของ คุณ เป็นไฟล์ .vrpython