
Pelajaran 2: Ubah Parameter di Drive untuk Perintah
Robot VR tidak menyentuh kastil tengah pada proyek terakhir. Ia perlu menempuh perjalanan lebih jauh. Sesuaikan parameternya, uji, dan saksikan Robot VR merobohkan kastil tengah!
-
Tetapkan jarak pergerakan Robot VR dengan memasukkan nilai "800" sebagai parameter kedua dalam perintahdrive_for. Proyek Anda sekarang akan terlihat seperti ini:
# Tambahkan kode proyek di "utama" def main(): drivetrain.drive_for(MAJU, 800, MM)
Untuk Informasi Anda
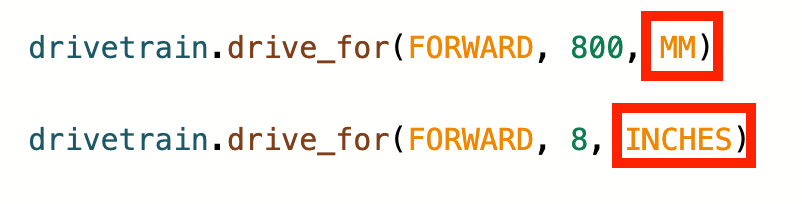
Perintah drive_fordapat menerima bilangan bulat (integer) dan desimal (float). Satuannya juga dapat diubah dari milimeter (mm) ke inci.
- Mulai proyek.

-
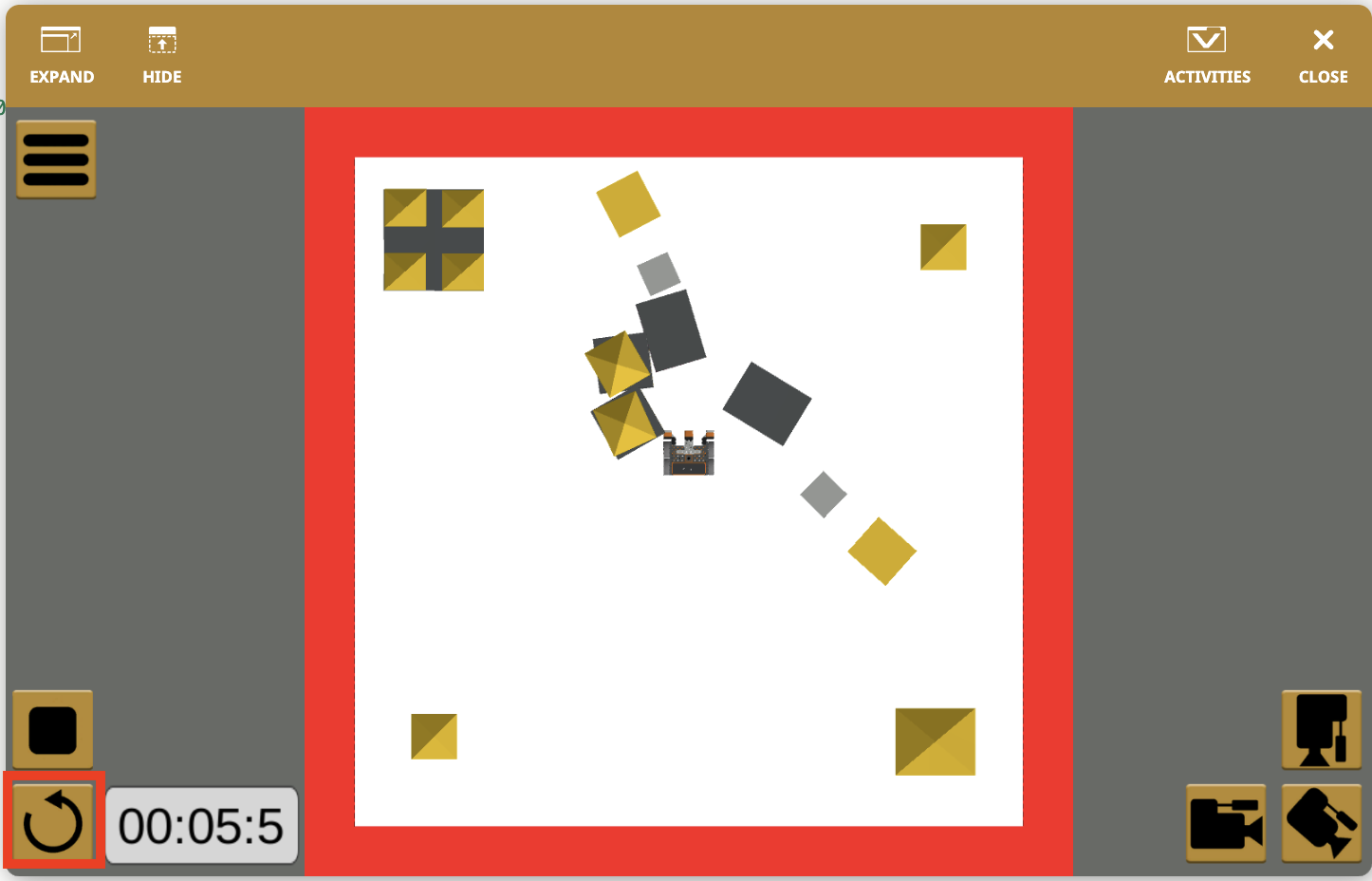
Robot VR akan bertabrakan dengan kastil di tengah dan menjatuhkan sebagiannya.

- Pilih tombol “Reset” untuk mereset Playground.
Robot VR sekarang perlu kembali ke posisi awal. Gunakan perintah tambahan drive_fordan ubah parameternya untuk membuatnya bergerak mundur untuk kembali ke posisi awal. -
Tambahkan perintah drive_forkedua ke proyek VEXcode VR, dan ubah arah dari “MAJU” menjadi “BALIK.” Proyek Anda sekarang akan terlihat seperti ini:
# Tambahkan kode proyek di "utama" def main(): drivetrain.drive_for(MAJU, 800, MM) drivetrain.drive_for(BALIK, 200, MM) -
Pastikan nilai jarak sama dengan perintahdrive_for pertama, 800 milimeter (mm), agar dapat kembali ke posisi awal. Proyek Anda sekarang akan terlihat seperti ini:
# Tambahkan kode proyek di "utama" def main(): drivetrain.drive_for(MAJU, 800, MM) drivetrain.drive_for(BALIK, 800, MM) - Pilih tombol “Mulai” dan jalankan proyek.

- Robot VR akan bergerak maju dan mundur sejauh 800 milimeter (mm), kembali ke posisi awal.

Catatan: Anda telah berhasil menyelesaikan bagian pertama Tantangan Castle Crasher! Sekalipun keempat bagian kastil tengah tidak roboh seluruhnya, jika bergeser sedikit, itu masih bisa diterima.
Untuk Informasi Anda
Untuk membuat Robot VR melaju maju dan mundur pada kecepatan berbeda, kecepatan gerak dapat ditingkatkan atau dikurangi menggunakan perintah set_drive_velocity. Perintah set_drive_velocitymenerima rentang 0 - 100 untuk parameter kecepatan. Kecepatan default adalah 50%. Mengubah kecepatan akan berlaku pada perintah Drivetrain berikutnya.
drivetrain.set_drive_velocity(50, PERSEN)Simpan Proyek Anda
Untuk menyimpan proyek Anda, pilih "Simpan Sebagai" di menu tarik-turun "File".
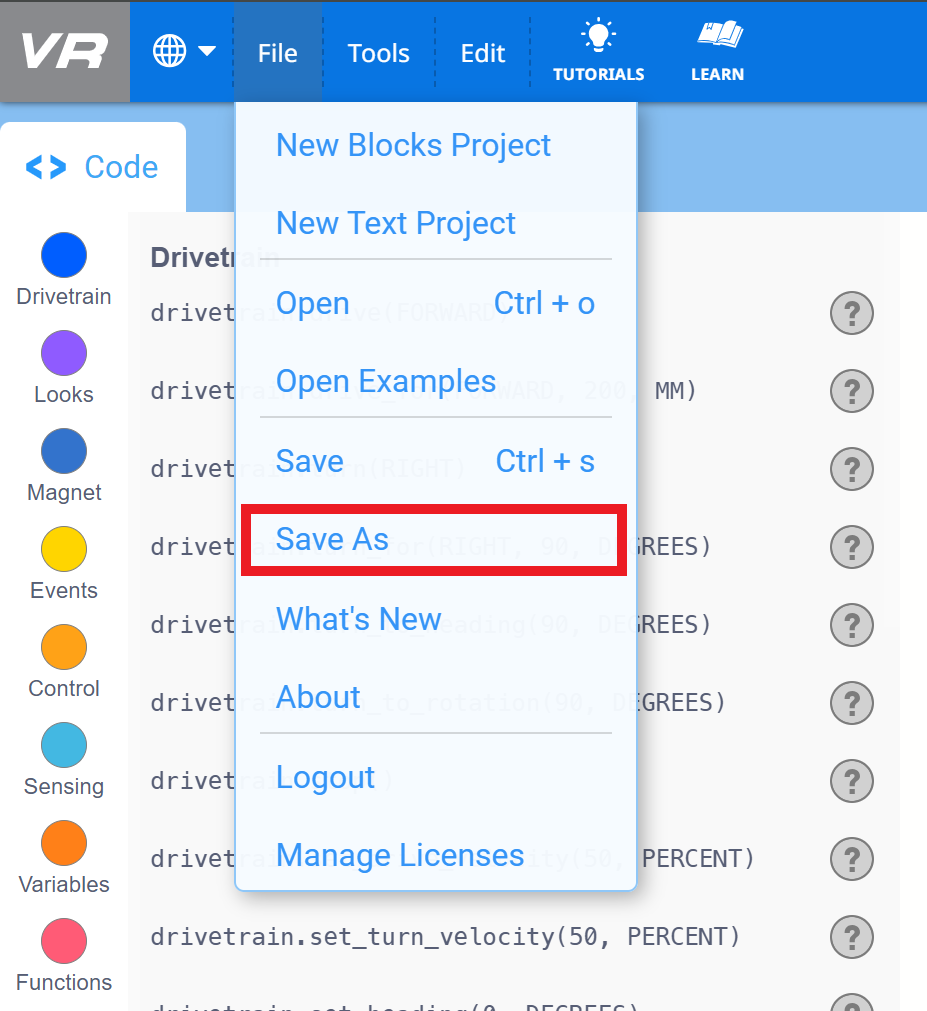
Setelah disimpan, proyek akan muncul di folder Unduhan perangkat Anda sebagai file .vrpython.