
पाठ 2: कमांड के लिए ड्राइव में पैरामीटर बदलें
पिछले प्रोजेक्ट में वीआर रोबोट ने केंद्रीय महल को नहीं छुआ था। इसे और आगे तक यात्रा करने की आवश्यकता है। पैरामीटर समायोजित करें, इसका परीक्षण करें, और वी.आर. रोबोट को केंद्र के महल को गिराते हुए देखें!
-
drive_forकमांड में दूसरे पैरामीटर के रूप में "800" मान दर्ज करके VR रोबोट द्वारा तय की जाने वाली दूरी निर्धारित करें। अब आपका प्रोजेक्ट कुछ इस तरह दिखना चाहिए:
# "main" में प्रोजेक्ट कोड जोड़ें def main(): drivetrain.drive_for(FORWARD, 800, MM)
आपकी जानकारी के लिए
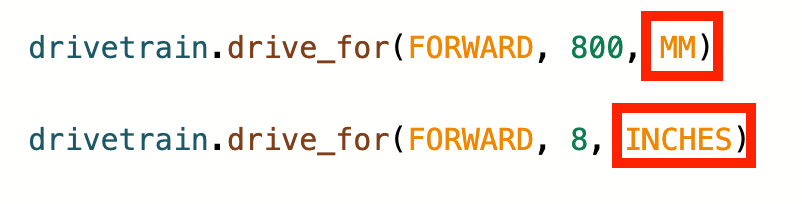
drive_forकमांड पूर्ण संख्या (पूर्णांक) और दशमलव (फ्लोट) दोनों को स्वीकार कर सकता है। इकाइयों को मिलीमीटर (मिमी) से इंच में भी बदला जा सकता है।
- परियोजना शुरू करें.

-
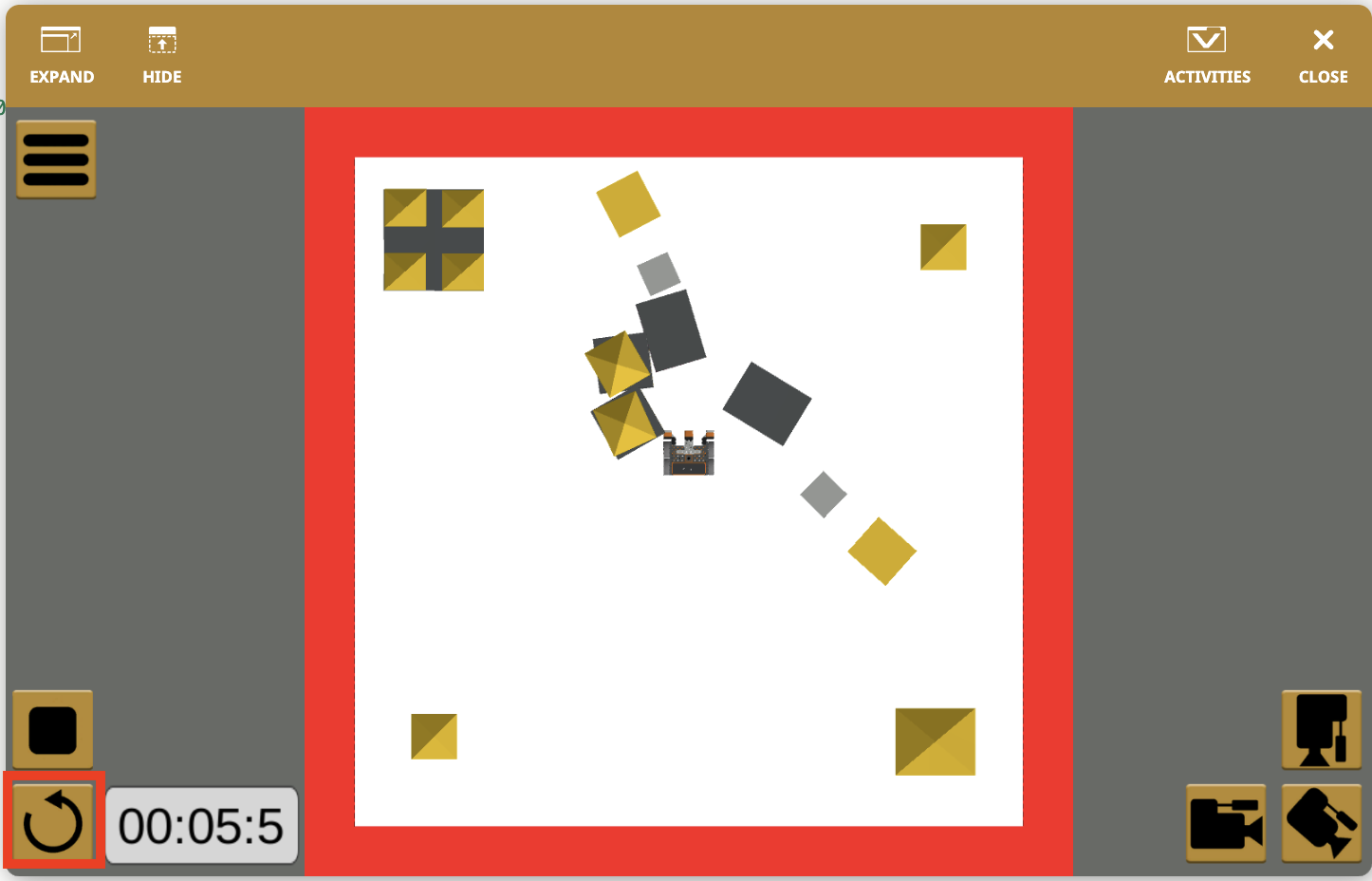
वी.आर. रोबोट केन्द्रीय महल से टकराएगा और उसके कुछ हिस्सों को गिरा देगा।

- खेल के मैदान को रीसेट करने के लिए "रीसेट" बटन का चयन करें।
वीआर रोबोट को अब शुरुआती स्थिति में लौटने की आवश्यकता है। अतिरिक्त drive_forकमांड का उपयोग करें और प्रारंभिक स्थिति पर लौटने के लिए इसे रिवर्स में चलाने के लिए पैरामीटर बदलें। -
VEXcode VR प्रोजेक्ट में दूसरा drive_forकमांड जोड़ें, और दिशा को “FORWARD” से “REVERSE” में बदलें। अब आपका प्रोजेक्ट कुछ इस तरह दिखना चाहिए:
# "main" में प्रोजेक्ट कोड जोड़ें def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 200, MM) -
सुनिश्चित करें कि दूरी का मान पहलेdrive_for कमांड, 800 मिलीमीटर (मिमी) के समान है, ताकि यह प्रारंभिक स्थिति में वापस आ सके। अब आपका प्रोजेक्ट कुछ इस तरह दिखना चाहिए:
# "main" में प्रोजेक्ट कोड जोड़ें def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) - “प्रारंभ” बटन का चयन करें और प्रोजेक्ट चलाएँ।

- वीआर रोबोट 800 मिलीमीटर (मिमी) तक आगे और पीछे चलेगा, और प्रारंभिक स्थिति में वापस आ जाएगा।

नोट: आपने कैसल क्रैशर चैलेंज का पहला भाग सफलतापूर्वक पूरा कर लिया है! भले ही केंद्रीय महल के सभी चार हिस्से पूरी तरह से ध्वस्त न हुए हों, यदि वे थोड़ा विस्थापित हो गए हैं, तो यह स्वीकार्य है
आपकी जानकारी के लिए
वीआर रोबोट को अलग-अलग गति से आगे और पीछे चलाने के लिए, ड्राइव वेग को set_drive_velocityकमांड का उपयोग करके बढ़ाया या घटाया जा सकता है। set_drive_velocityकमांड वेग पैरामीटर के लिए 0 - 100 तक की सीमा स्वीकार करता है। डिफ़ॉल्ट वेग 50% है. वेग में परिवर्तन किसी भी आगामी ड्राइवट्रेन कमांड पर लागू होगा।
ड्राइवट्रेन.सेट_ड्राइव_वेलोसिटी(50, प्रतिशत)अपना प्रोजेक्ट सहेजें
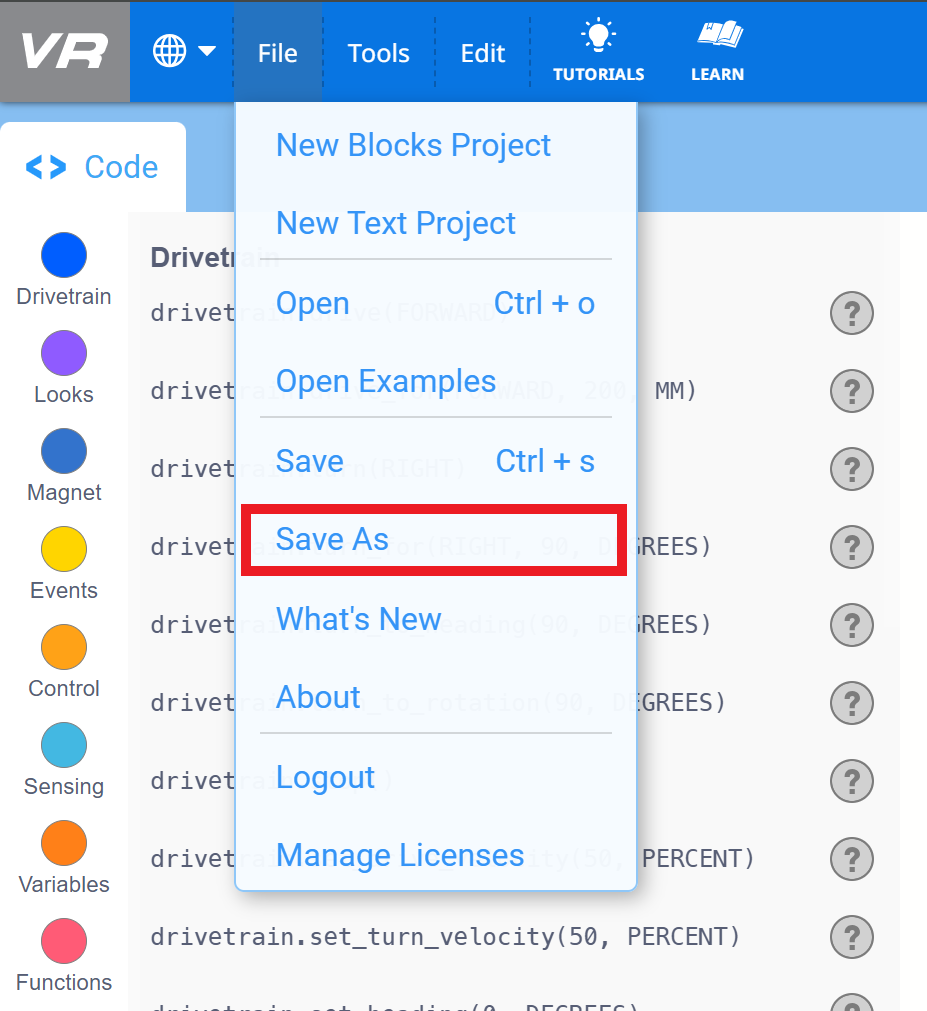
अपनी परियोजना को सहेजने के लिए, “फ़ाइल” ड्रॉप-डाउन मेनू में “इस रूप में सहेजें” का चयन करें।
एक बार सहेजे जाने के बाद, प्रोजेक्ट आपके डिवाइस के डाउनलोड फ़ोल्डर में .vrpython फ़ाइल के रूप में दिखाई देगा।