
Lição 2: Alterar Parâmetros na Unidade para Comando
O Robô VR não tocou no castelo central no último projeto. Ele precisa viajar mais longe. Ajuste os parâmetros, teste e veja o robô VR derrubar o castelo central!
-
Defina a distância que o robô VR se irá deslocar, introduzindo o valor "800" como segundo parâmetro no comando drive_for . O seu projeto deve agora ter este aspeto:
# Adicione o código do projeto em "main" def main() :drivetrain.drive_for (FORWARD, 800, MM)
Para sua informação
O comando drive_for pode aceitar números inteiros (inteiros) e decimais (flutuantes). As unidades também podem ser alteradas de milímetros (mm) para polegadas.

- Iniciar o projeto.

-
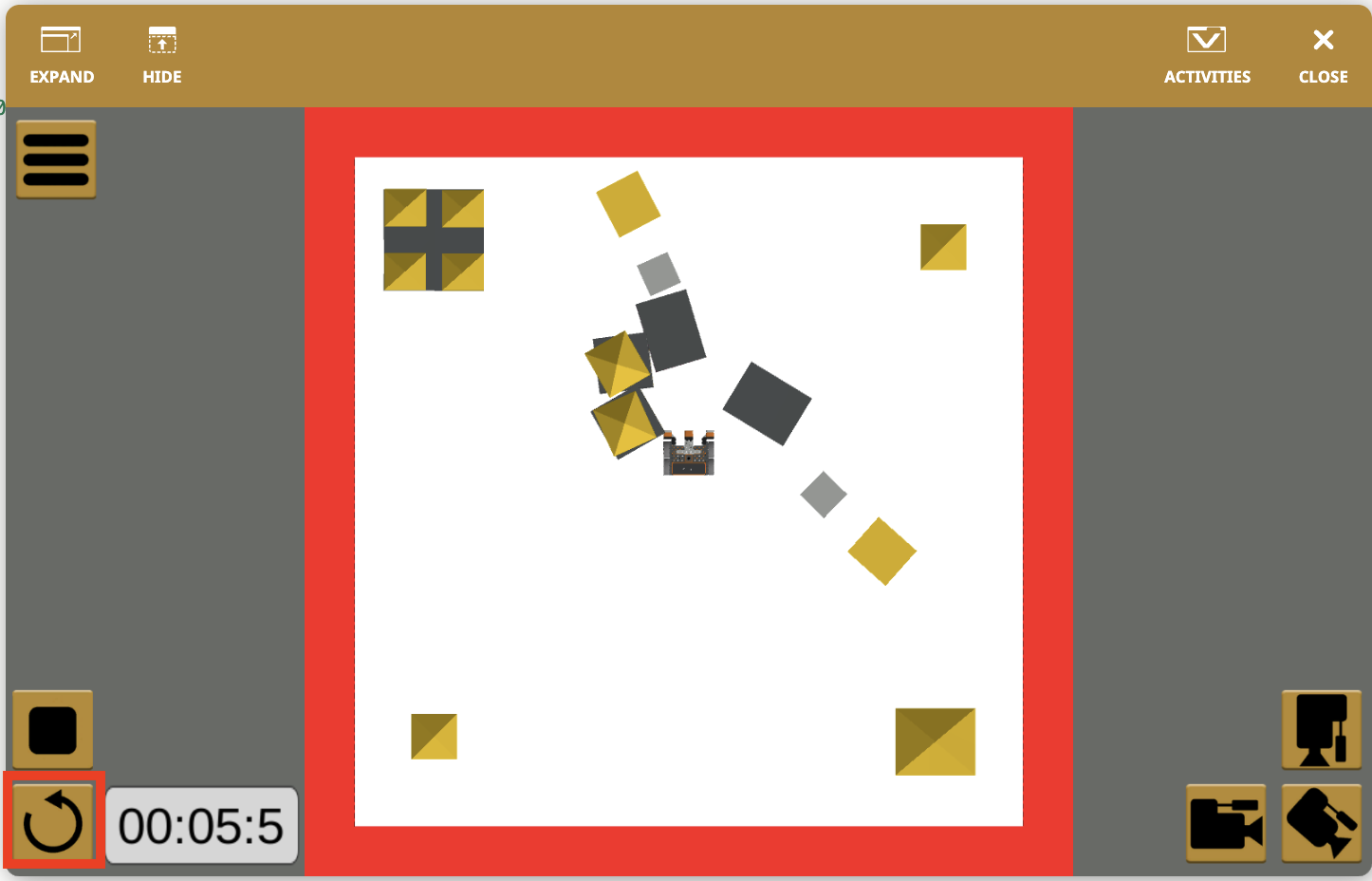
O Robô de RV colidirá com o castelo central e derrubará partes dele.

- Selecione o botão "Reset" para reiniciar o Playground.
O Robô VR agora precisa retornar à posição inicial. Utilize um comando drive_for adicional e altere os parâmetros para o fazer rodar no sentido inverso para voltar à posição inicial. -
Adicione um segundo comando drive_for ao projeto VEXcode VR e altere a direção de “FORWARD” para “REVERSE”. O seu projeto deve agora ter este aspeto:
# Adicione o código do projeto em "main" def main() :drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 200, MM) -
Certifique-se de que o valor da distância é igual ao primeiro comando drive_for , 800 milímetros (mm), para que volte à posição inicial. O seu projeto deve agora ter este aspeto:
# Adicione o código do projeto em "main" def main() :drivetrain.drive_for (FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) - Seleccione o botão "Iniciar" e execute o projecto.

- O Robô VR se moverá para frente e para trás por 800 milímetros (mm), retornando à posição inicial.

Nota: Você concluiu com sucesso a primeira parte do Desafio Castle Crasher! Mesmo que todas as quatro partes do castelo central não sejam completamente derrubadas, se estiverem ligeiramente deslocadas, isso é aceitável.
Para sua informação
Para fazer um robô de RV avançar e recuar a velocidades diferentes, a velocidade de acionamento pode ser aumentada ou diminuída através do comando set_drive_velocity . O comando set_drive_velocity aceita um intervalo de 0 a 100 para o parâmetro de velocidade. A velocidade padrão é de 50%. A alteração da velocidade será aplicada a quaisquer comandos subsequentes do sistema de transmissão.
drivetrain.set_drive_velocity(50, POR CENTO)Guardar o seu projeto
Para guardar o seu projeto, selecione "Guardar como" no menu suspenso "Ficheiro".
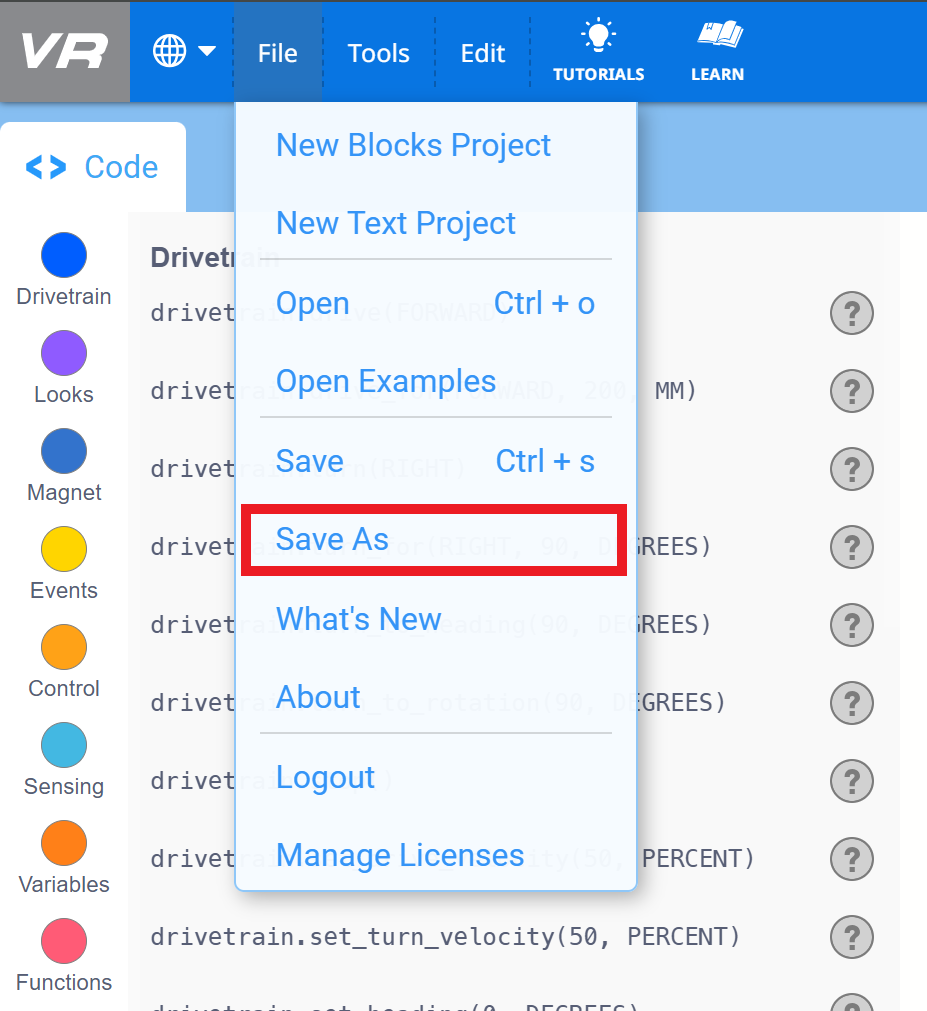
Depois de salvo, o projeto aparecerá na pasta Downloads do seu dispositivo como um arquivo .vrpython.
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf