
Bài 2: Thay đổi tham số trong lệnh Drive for Command
Robot VR không chạm vào lâu đài trung tâm trong dự án trước. Nó cần phải di chuyển xa hơn. Điều chỉnh các thông số, kiểm tra và xem Robot VR đánh đổ lâu đài ở giữa!
-
Đặt khoảng cách mà Robot VR sẽ di chuyển bằng cách nhập giá trị "800" làm tham số thứ hai trong lệnhdrive_for. Dự án của bạn bây giờ sẽ trông như thế này:
# Thêm mã dự án vào "main" def main(): drivetrain.drive_for(FORWARD, 800, MM)
Để bạn biết
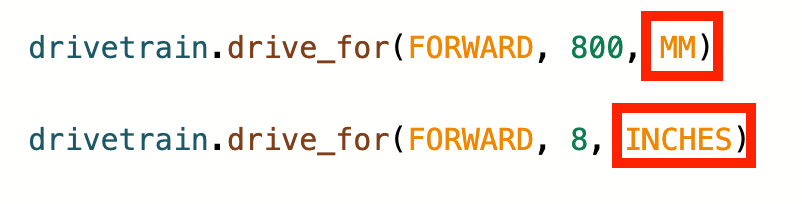
Lệnh drive_forcó thể chấp nhận cả số nguyên (số nguyên) và số thập phân (số thực). Đơn vị cũng có thể được thay đổi từ milimét (mm) sang inch.
- Bắt đầu dự án.

-
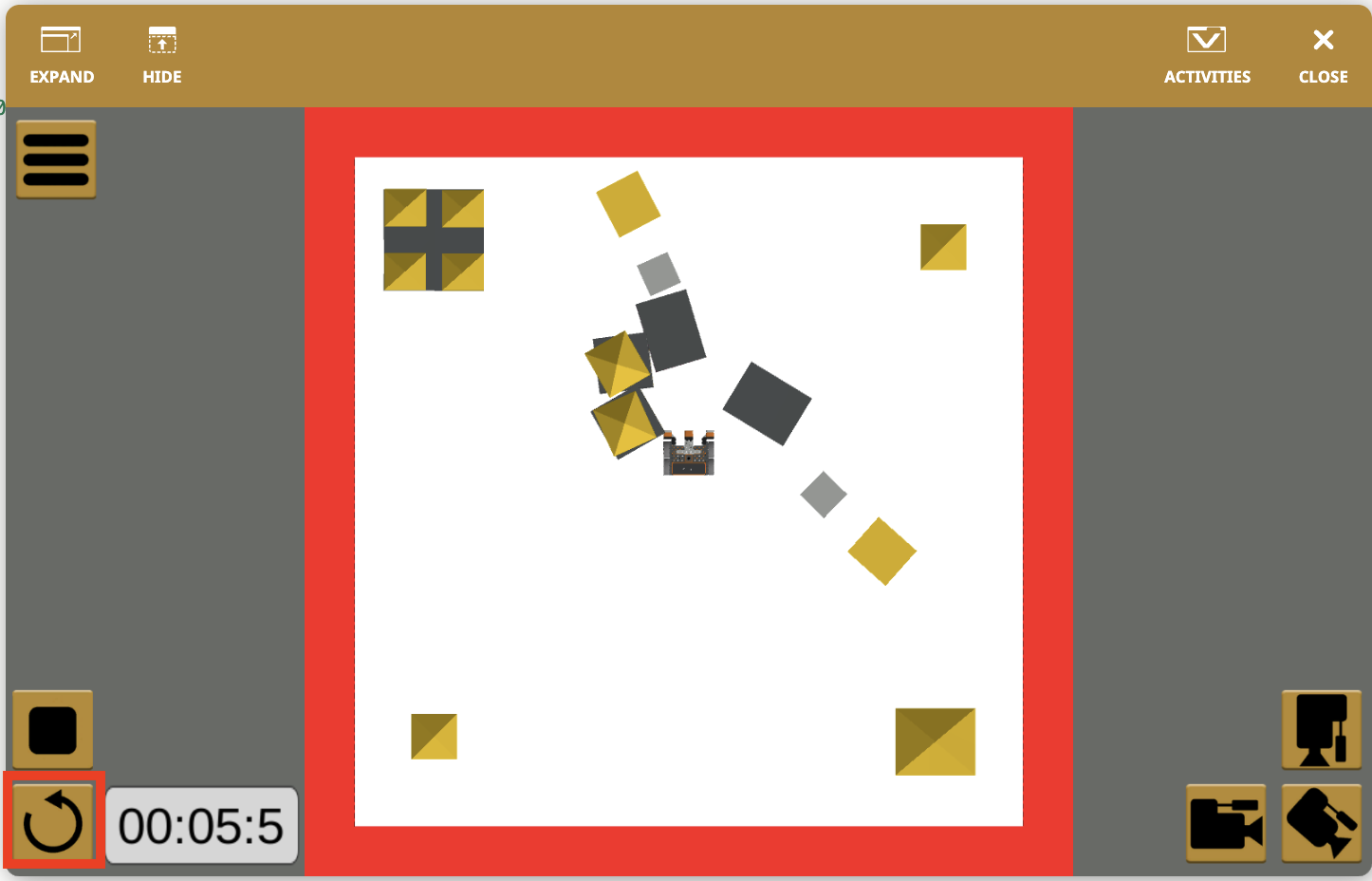
Robot VR sẽ va chạm với lâu đài ở giữa và làm đổ một số bộ phận của lâu đài.

- Chọn nút “Đặt lại” để đặt lại Sân chơi.
Bây giờ, Robot VR cần phải trở về vị trí bắt đầu. Sử dụng lệnh drive_forbổ sung và thay đổi các tham số để khiến nó chạy ngược lại để trở về vị trí bắt đầu. -
Thêm lệnh drive_forthứ hai vào dự án VEXcode VR và thay đổi hướng từ “FORWARD” thành “REVERSE”. Dự án của bạn bây giờ sẽ trông như thế này:
# Thêm mã dự án vào "main" def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 200, MM) -
Đảm bảo giá trị khoảng cách giống với lệnhdrive_for đầu tiên, 800 milimét (mm), để nó trở về vị trí bắt đầu. Dự án của bạn bây giờ sẽ trông như thế này:
# Thêm mã dự án vào "main" def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) - Chọn nút “Bắt đầu” và chạy dự án.

- Robot VR sẽ di chuyển về phía trước và phía sau 800 milimét (mm), sau đó trở về vị trí bắt đầu.

Lưu ý: Bạn đã hoàn thành thành công phần đầu tiên của Thử thách Castle Crasher! Ngay cả khi cả bốn phần của lâu đài trung tâm không bị đổ hoàn toàn, nếu chúng bị dịch chuyển một chút thì vẫn có thể chấp nhận được.
Để bạn biết
Để khiến Robot VR di chuyển về phía trước và lùi lại với tốc độ khác nhau, tốc độ di chuyển có thể được tăng hoặc giảm bằng lệnh set_drive_velocity. Lệnh set_drive_velocitychấp nhận phạm vi từ 0 - 100 cho tham số vận tốc. Tốc độ mặc định là 50%. Việc thay đổi vận tốc sẽ áp dụng cho bất kỳ lệnh Truyền động nào tiếp theo.
drivetrain.set_drive_velocity(50, PHẦN TRĂM)Lưu dự án của bạn
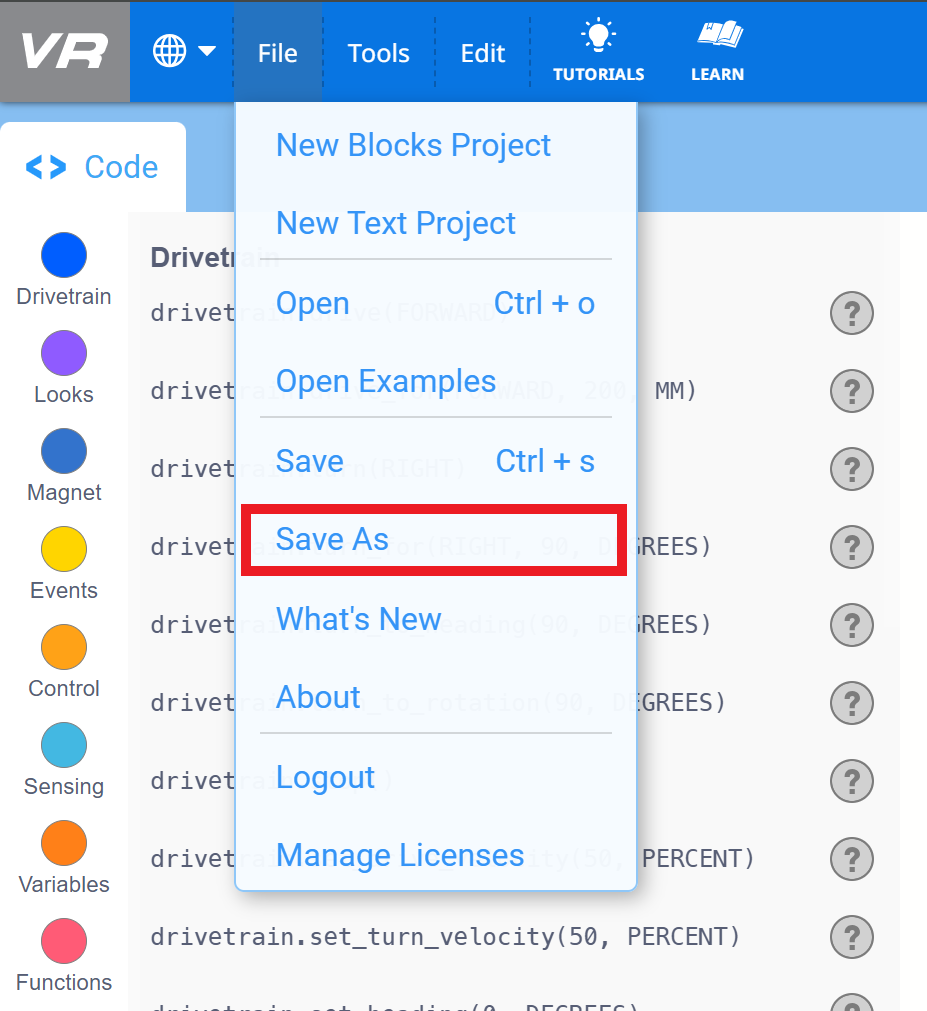
Để lưu dự án của bạn, hãy chọn “Lưu dưới dạng” trong menu thả xuống “Tệp”.
Sau khi lưu, dự án sẽ xuất hiện trong thư mục Tải xuống của thiết bị dưới dạng tệp .vrpython.