
Lezione 2: Modifica dei parametri nell'unità per il comando
Il robot VR non ha toccato il castello centrale nell'ultimo progetto. Deve viaggiare più lontano. Regola i parametri, testalo e guarda il robot VR rovesciare il castello centrale!
-
Imposta la distanza a cui si sposterà il robot VR immettendo il valore "800" come secondo parametro nel comando drive_for . Il tuo progetto dovrebbe assomigliare a questo:
# Aggiungi codice progetto in "main" def main(): drivetrain.drive_for(FORWARD, 800, MM)
Per tua informazione
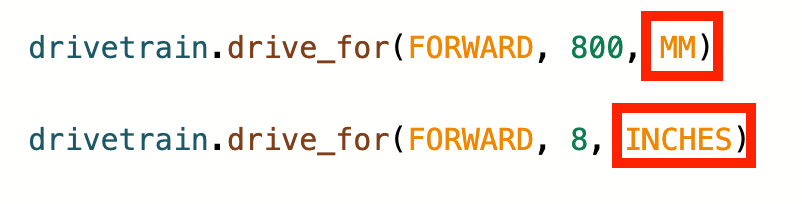
Il comando drive_for può accettare sia numeri interi che decimali. Le unità possono anche essere modificate da millimetri (mm) a pollici.
- Avviare il progetto.

-
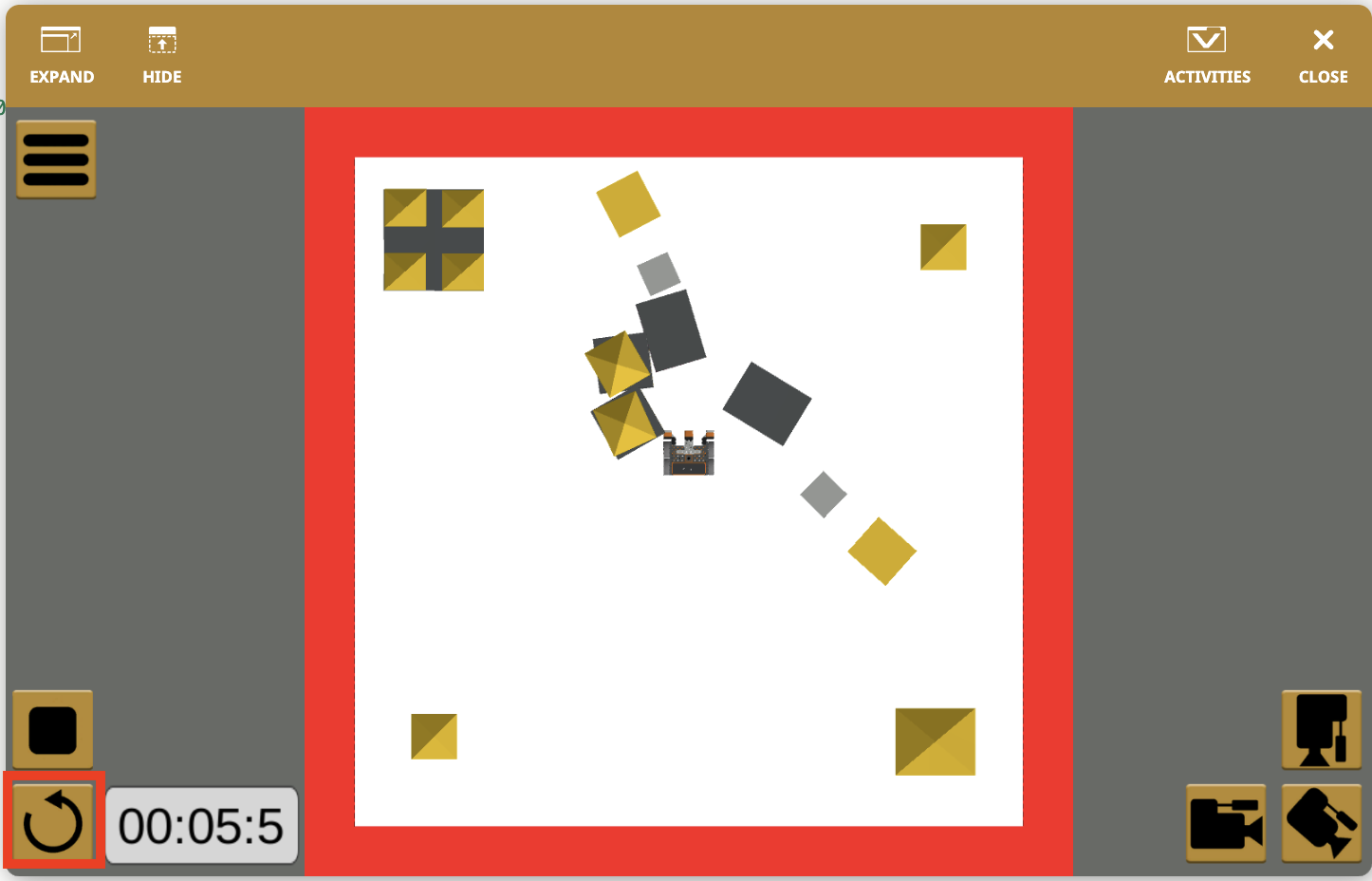
Il robot VR si scontrerà con il castello centrale e ne rovescerà alcune parti.

- Selezionare il pulsante "Ripristina" per ripristinare il parco giochi.
Il robot VR ora deve tornare alla posizione di partenza. Utilizzare un comando aggiuntivo drive_for e modificare i parametri per far sì che il veicolo proceda in retromarcia per tornare alla posizione iniziale. -
Aggiungere un secondo comando drive_for al progetto VEXcode VR e modificare la direzione da "AVANTI" a "INDIETRO". Il tuo progetto dovrebbe assomigliare a questo:
# Add project code in "main" def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 200, MM) -
Assicurarsi che il valore della distanza sia lo stesso del primo comando drive_for , ovvero 800 millimetri (mm), affinché possa tornare alla posizione iniziale. Il tuo progetto dovrebbe assomigliare a questo:
# Add project code in "main" def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) - Selezionare il pulsante "Start" ed eseguire il progetto.

- Il Robot VR si muoverà avanti e indietro per 800 millimetri (mm), tornando alla posizione di partenza.

Nota: hai completato con successo la prima parte della sfida Castle Crasher! Anche se tutte e quattro le parti del castello centrale non sono completamente rovesciate, se sono leggermente spostate, è accettabile.
Per tua informazione
Per far sì che un robot VR proceda avanti e indietro a velocità diverse, la velocità di guida può essere aumentata o diminuita utilizzando il comando set_drive_velocity . Il comando set_drive_velocity accetta un intervallo da 0 a 100 per il parametro velocità. La velocità predefinita è del 50%. La modifica della velocità si applicherà a tutti i successivi comandi Drivetrain.
drivetrain.set_drive_velocity(50, PERCENTO)Salva il tuo progetto
Per salvare il tuo progetto, seleziona "Salva con nome" nel menu a discesa "File".
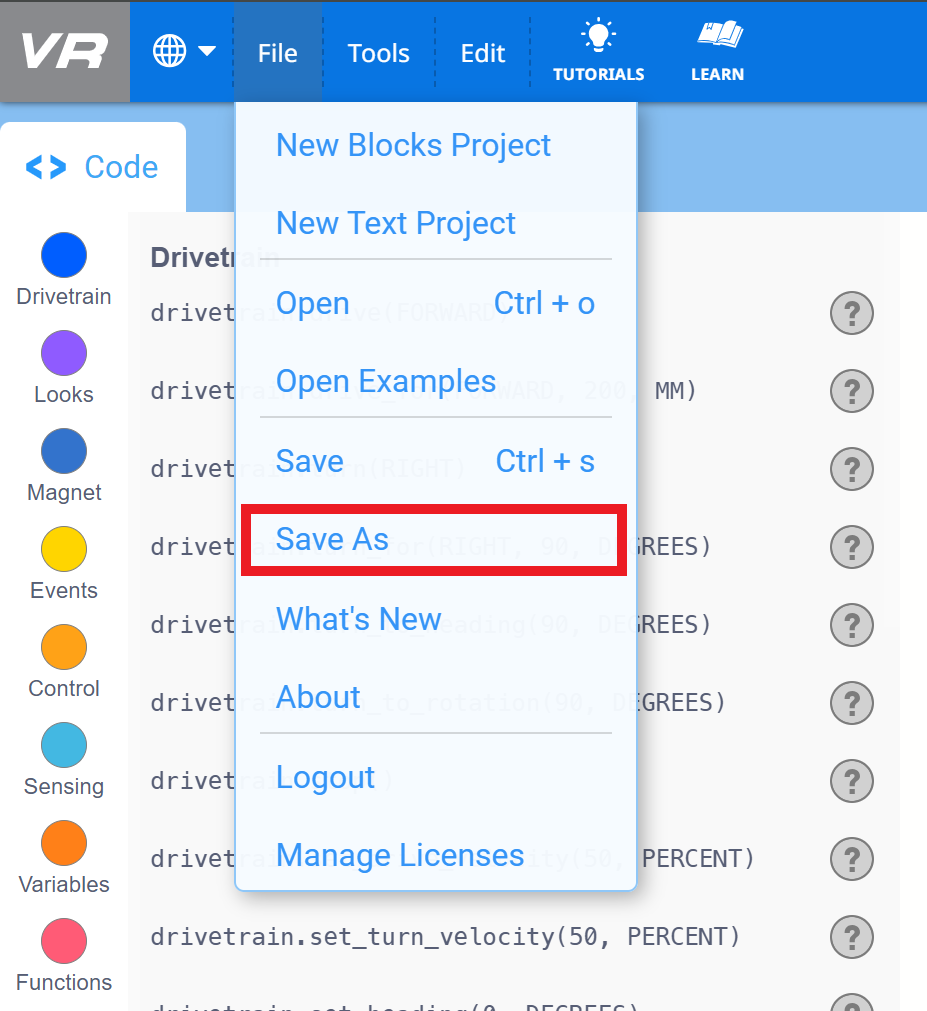
Una volta salvato, il progetto apparirà nella cartella Download del tuo dispositivo come file .vrpython.