
പാഠം 2: കമാൻഡിനായുള്ള ഡ്രൈവിലെ പാരാമീറ്ററുകൾ മാറ്റുക
കഴിഞ്ഞ പ്രോജക്റ്റിൽ വിആർ റോബോട്ട് സെന്റർ കോട്ടയിൽ തൊട്ടില്ല. അതിന് കൂടുതൽ ദൂരം സഞ്ചരിക്കേണ്ടതുണ്ട്. പാരാമീറ്ററുകൾ ക്രമീകരിക്കുക, അത് പരീക്ഷിക്കുക, വിആർ റോബോട്ട് മധ്യഭാഗത്തെ കോട്ടയിൽ തട്ടി വീഴുന്നത് കാണുക!
-
drive_forകമാൻഡിലെ രണ്ടാമത്തെ പാരാമീറ്ററായി "800" എന്ന മൂല്യം നൽകി VR റോബോട്ട് നീങ്ങുന്ന ദൂരം സജ്ജമാക്കുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇപ്പോൾ ഇതുപോലെ ആയിരിക്കണം:
# "main"-ൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക def main(): drivetrain.drive_for(FORWARD, 800, MM)
നിങ്ങളുടെ അറിവിലേക്കായി
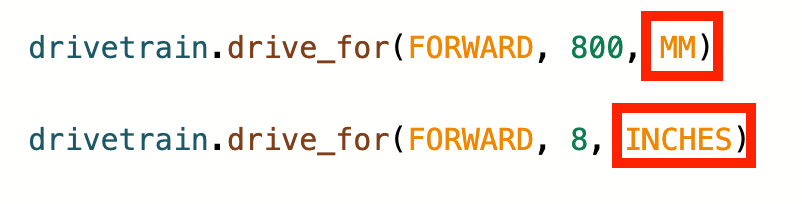
drive_forകമാൻഡിന് പൂർണ്ണ സംഖ്യകളും (പൂർണ്ണസംഖ്യകൾ) ദശാംശങ്ങളും (ഫ്ലോട്ടുകൾ) സ്വീകരിക്കാൻ കഴിയും. യൂണിറ്റുകൾ മില്ലിമീറ്ററിൽ (മില്ലീമീറ്റർ) നിന്ന് ഇഞ്ചിലേക്ക് മാറ്റാനും കഴിയും.
- പദ്ധതി ആരംഭിക്കുക.

-
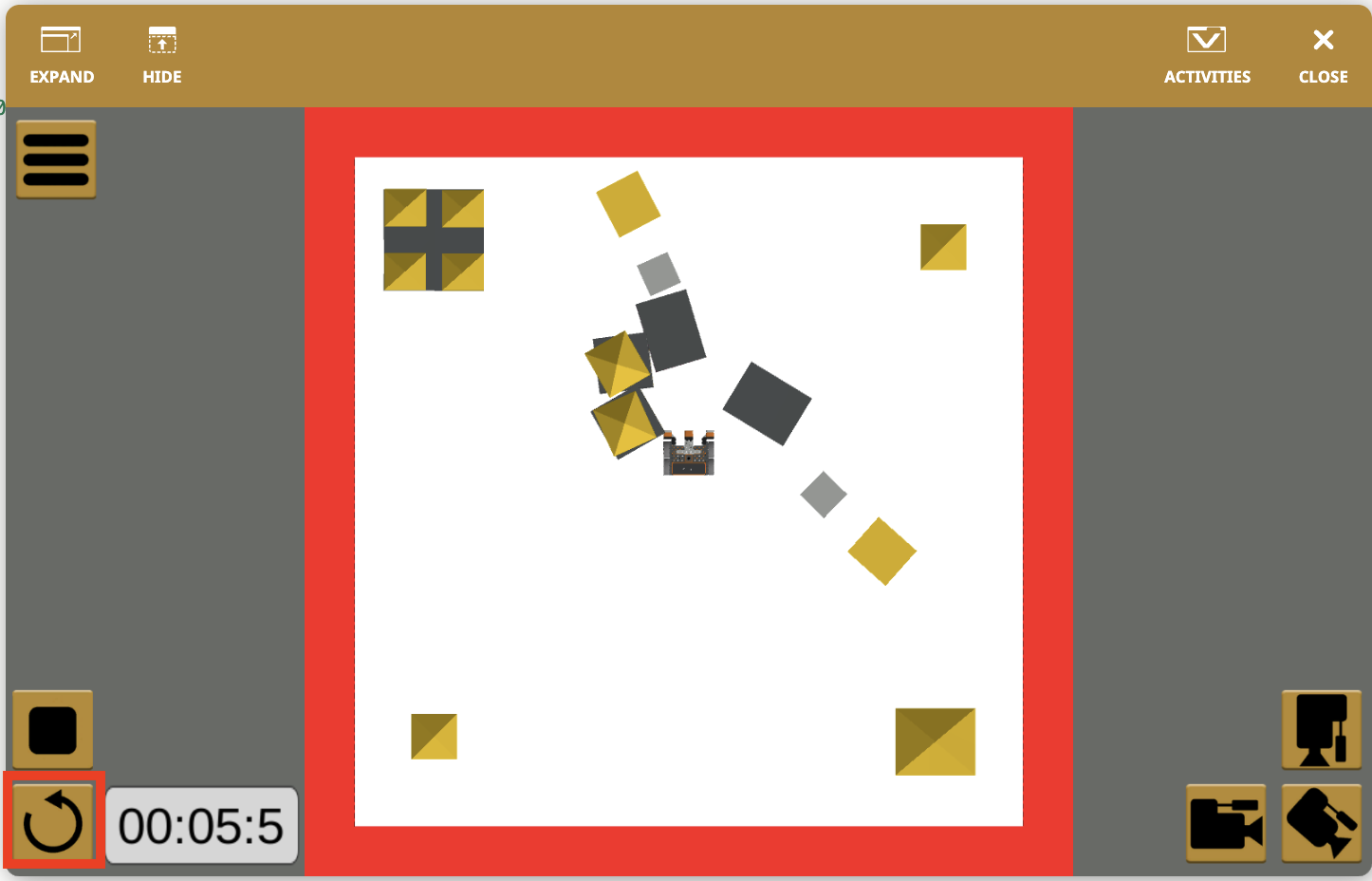
വിആർ റോബോട്ട് സെന്റർ കോട്ടയിൽ ഇടിക്കുകയും അതിന്റെ ചില ഭാഗങ്ങൾ മറിച്ചിടുകയും ചെയ്യും.

- പ്ലേഗ്രൗണ്ട് പുനഃസജ്ജമാക്കാൻ "റീസെറ്റ്" ബട്ടൺ തിരഞ്ഞെടുക്കുക.
VR റോബോട്ട് ഇപ്പോൾ ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങേണ്ടതുണ്ട്. ഒരു അധിക drive_forകമാൻഡ് ഉപയോഗിച്ച്, പാരാമീറ്ററുകൾ മാറ്റി, അത് റിവേഴ്സ് ഡ്രൈവ് ആക്കി ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങുക. -
VEXcode VR പ്രോജക്റ്റിലേക്ക് ഒരു രണ്ടാമത്തെ drive_forകമാൻഡ് ചേർക്കുക, തുടർന്ന് “FORWARD” എന്നതിൽ നിന്ന് “REVERSE” എന്നതിലേക്ക് ദിശ മാറ്റുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇപ്പോൾ ഇതുപോലെ ആയിരിക്കണം:
# "main"-ൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 200, MM) -
ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങുന്നതിന്, ദൂര മൂല്യം ആദ്യത്തെdrive_for കമാൻഡിന് തുല്യമാണെന്ന് ഉറപ്പാക്കുക, 800 മില്ലിമീറ്റർ (mm). നിങ്ങളുടെ പ്രോജക്റ്റ് ഇപ്പോൾ ഇതുപോലെ ആയിരിക്കണം:
# "main"-ൽ പ്രോജക്റ്റ് കോഡ് ചേർക്കുക def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) - "ആരംഭിക്കുക" ബട്ടൺ തിരഞ്ഞെടുത്ത് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.

- വിആർ റോബോട്ട് 800 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) മുന്നോട്ടും പിന്നോട്ടും നീങ്ങി ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങും.

കുറിപ്പ്: കാസിൽ ക്രാഷർ ചലഞ്ചിന്റെ ആദ്യ ഭാഗം നിങ്ങൾ വിജയകരമായി പൂർത്തിയാക്കി! മധ്യഭാഗത്തെ കോട്ടയുടെ നാല് ഭാഗങ്ങളും പൂർണ്ണമായും മറിഞ്ഞിട്ടില്ലെങ്കിലും, അവ ചെറുതായി സ്ഥാനഭ്രംശം സംഭവിച്ചിട്ടുണ്ടെങ്കിൽ, അത് സ്വീകാര്യമാണ്.
നിങ്ങളുടെ അറിവിലേക്കായി
ഒരു VR റോബോട്ട് വ്യത്യസ്ത വേഗതയിൽ മുന്നോട്ടും പിന്നോട്ടും ഡ്രൈവ് ചെയ്യുന്നതിന്, set_drive_velocityകമാൻഡ് ഉപയോഗിച്ച് ഡ്രൈവ് വേഗത കൂട്ടുകയോ കുറയ്ക്കുകയോ ചെയ്യാം. set_drive_velocityകമാൻഡ് പ്രവേഗ പാരാമീറ്ററിനായി 0 മുതൽ 100 വരെയുള്ള ശ്രേണി സ്വീകരിക്കുന്നു. സ്ഥിരസ്ഥിതി വേഗത 50% ആണ്. വേഗത മാറ്റുന്നത് തുടർന്നുള്ള ഏതൊരു ഡ്രൈവ്ട്രെയിൻ കമാൻഡുകൾക്കും ബാധകമാകും.
ഡ്രൈവ്ട്രെയിൻ.സെറ്റ്_ഡ്രൈവ്_വെലോസിറ്റി(50, ശതമാനം)നിങ്ങളുടെ പ്രോജക്റ്റ് സംരക്ഷിക്കുക
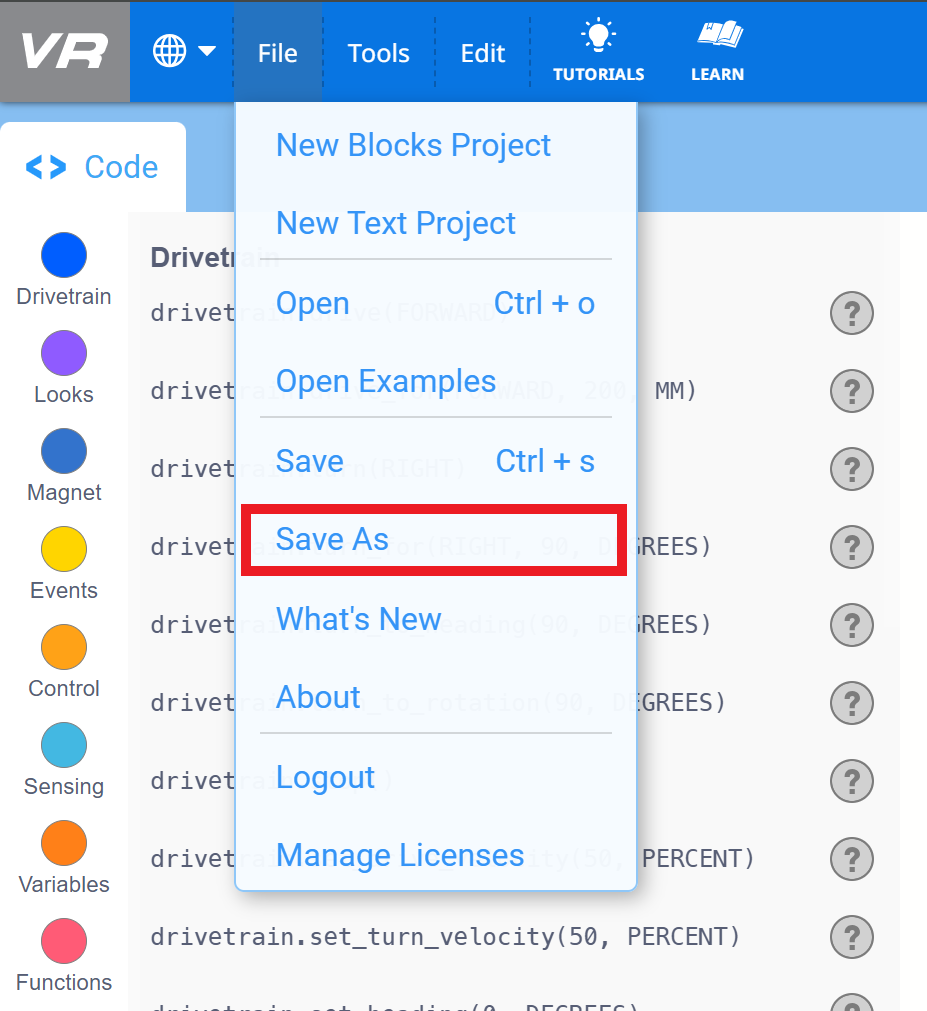
നിങ്ങളുടെ പ്രോജക്റ്റ് സംരക്ഷിക്കാൻ, “ഫയൽ” ഡ്രോപ്പ്-ഡൗൺ മെനുവിൽ “ഇതായി സംരക്ഷിക്കുക” തിരഞ്ഞെടുക്കുക.
സേവ് ചെയ്തുകഴിഞ്ഞാൽ, പ്രോജക്റ്റ് നിങ്ങളുടെ ഉപകരണത്തിലെ ഡൗൺലോഡ് ഫോൾഡറിൽ .vrpython ഫയലായി ദൃശ്യമാകും.
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.