
Lección 2: Cambiar parámetros en la unidad de comando
El robot de realidad virtual no tocó el castillo central en el último proyecto. Necesita viajar más lejos. ¡Ajusta los parámetros, pruébalo y observa cómo el robot VR derriba el castillo central!
-
Establezca la distancia que se moverá el robot VR ingresando el valor "800" como segundo parámetro en el comando drive_for . Tu proyecto ahora debería verse así:
# Añadir código de proyecto en "main" def main(): drivetrain.drive_for(FORWARD, 800, MM)
Para su información
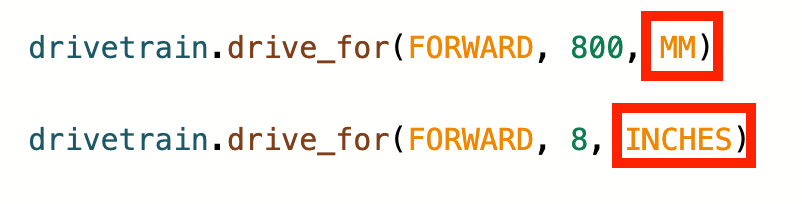
El comando drive_for puede aceptar tanto números enteros (enteros) como decimales (flotantes). Las unidades también se pueden cambiar de milímetros (mm) a pulgadas.
- Iniciar el proyecto.

-
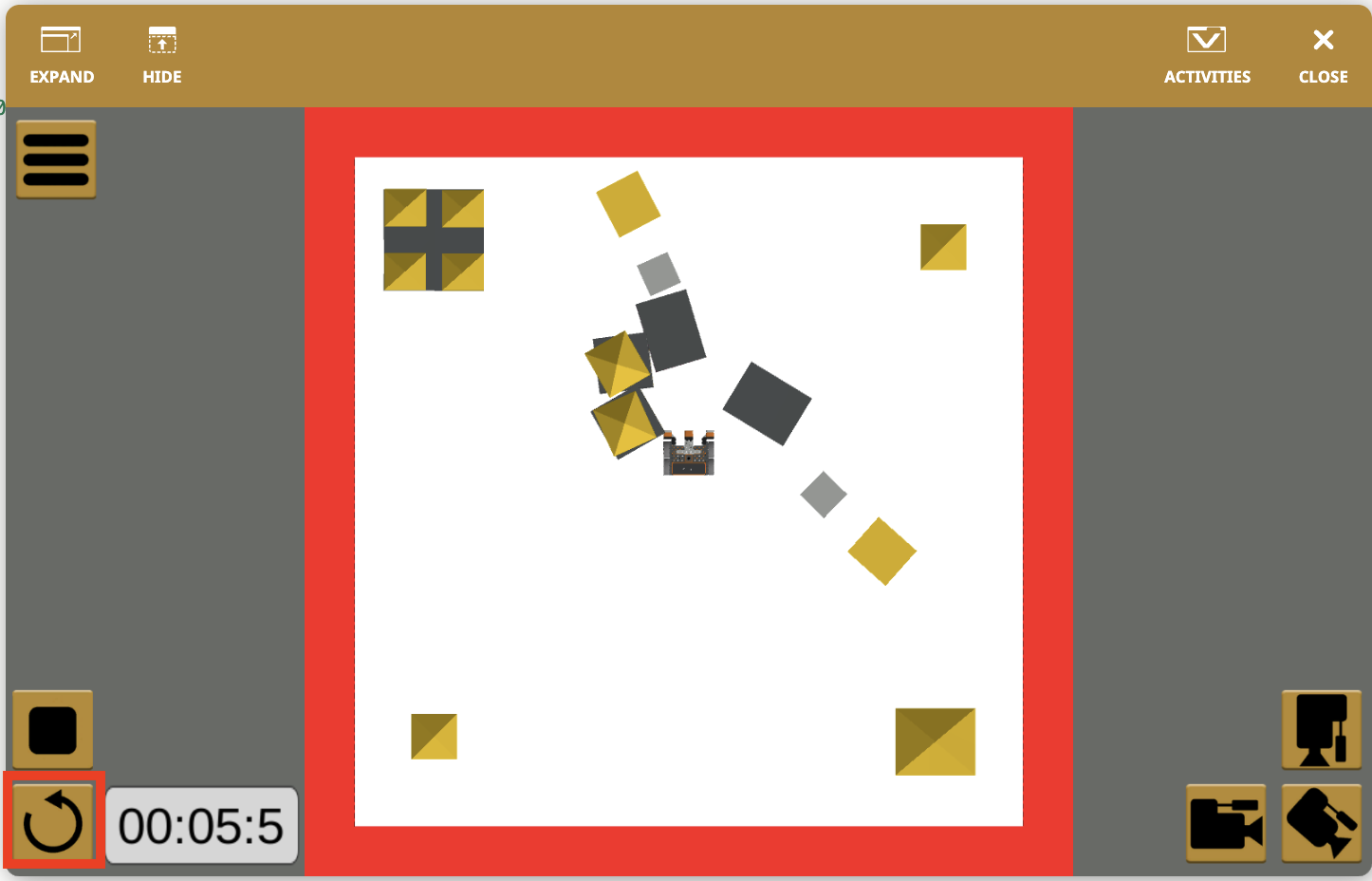
El robot VR chocará con el castillo central y derribará partes de él.

- Seleccione el botón "Restablecer" para restablecer el patio de recreo.
El robot VR ahora necesita volver a la posición inicial. Utilice un comando adicional drive_for y cambie los parámetros para que conduzca en reversa para regresar a la posición inicial. -
Agregue un segundo comando drive_for al proyecto VEXcode VR y cambie la dirección de “ADELANTE” a “REVERSA”. Tu proyecto ahora debería verse así:
# Añadir código de proyecto en "main" def main() : drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 200, MM) -
Asegúrese de que el valor de la distancia sea el mismo que el primer comando drive_for , 800 milímetros (mm), para que regrese a la posición inicial. Tu proyecto ahora debería verse así:
# Añadir código de proyecto en "main" def main() : drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) - Seleccione el botón "Inicio" y ejecute el proyecto.

- El robot VR se moverá hacia adelante y hacia atrás durante 800 milímetros (mm), volviendo a la posición inicial.

Nota: ¡Has completado con éxito la primera parte del Castle Crasher Challenge! Incluso si las cuatro partes del castillo central no están completamente derribadas, si están ligeramente desplazadas, eso es aceptable.
Para su información
Para hacer que un robot VR avance y retroceda a diferentes velocidades, la velocidad de conducción se puede aumentar o disminuir utilizando el comando set_drive_velocity . El comando set_drive_velocity acepta un rango de 0 a 100 para el parámetro de velocidad. La velocidad predeterminada es del 50%. El cambio de velocidad se aplicará a cualquier comando posterior de la transmisión.
drivetrain.set_drive_velocity(50, POR CIENTO)Guarda tu proyecto
Para guardar tu proyecto, selecciona "Guardar como" en el menú desplegable "Archivo".
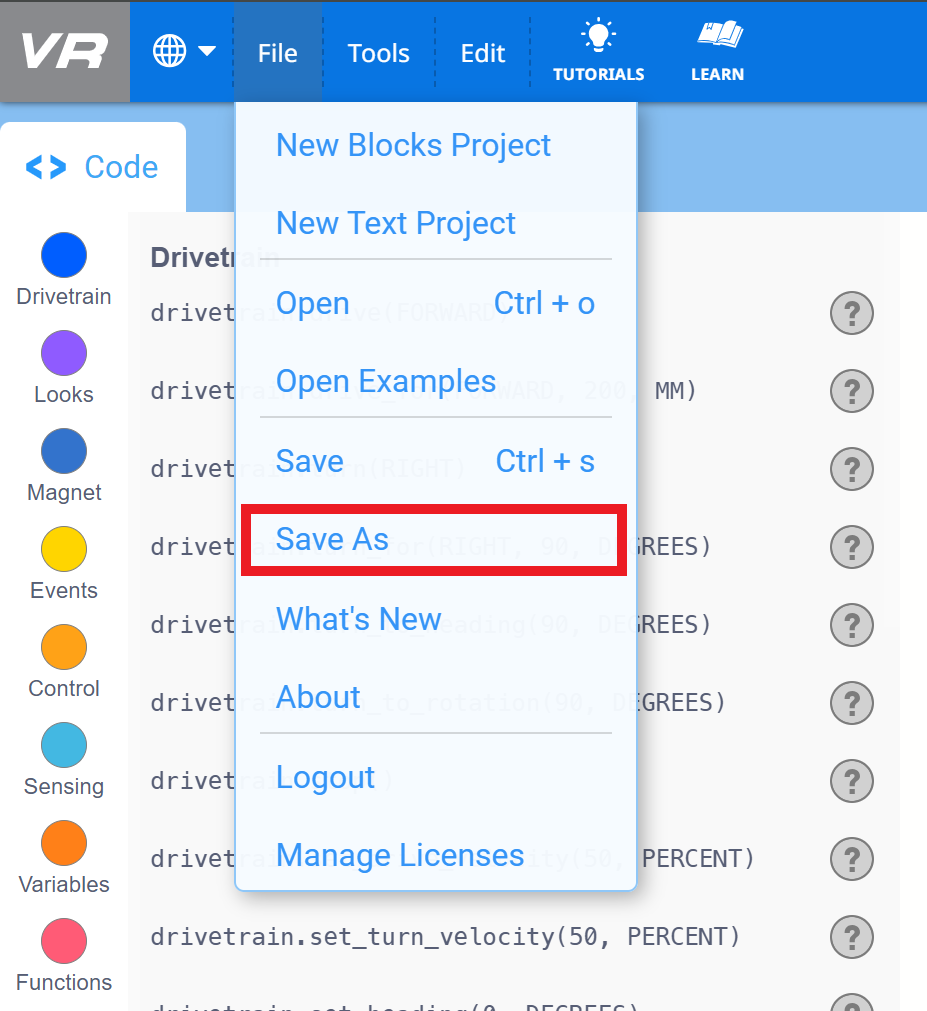
Una vez guardado, el proyecto aparecerá en la carpeta Descargas de tu dispositivo como un archivo .vrpython.
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf