
레슨 2: 명령 드라이브의 매개변수 변경
VR 로봇은 지난 프로젝트에서 중앙 성을 건드리지 않았습니다. 더 멀리까지 이동해야 합니다. 매개변수를 조정하고 테스트한 후 VR 로봇이 중앙의 성을 무너뜨리는 모습을 지켜보세요!
-
drive_for명령의 두 번째 매개변수에 "800" 값을 입력하여 VR 로봇이 이동할 거리를 설정합니다. 이제 프로젝트는 다음과 같이 보일 것입니다.
# "main" 에 프로젝트 코드 추가 def main(): drivetrain.drive_for(FORWARD, 800, MM)
귀하의 정보를 위해
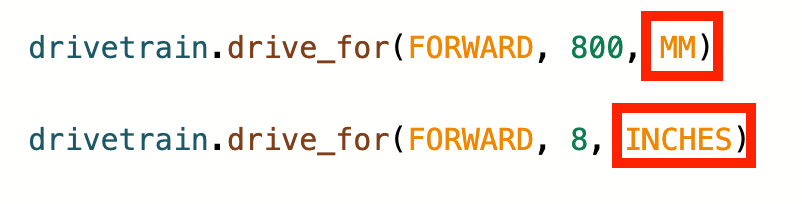
drive_for명령은 정수와 소수를 모두 허용합니다. 단위는 밀리미터(mm)에서 인치로 변경할 수도 있습니다.
- 프로젝트를 시작합니다.

-
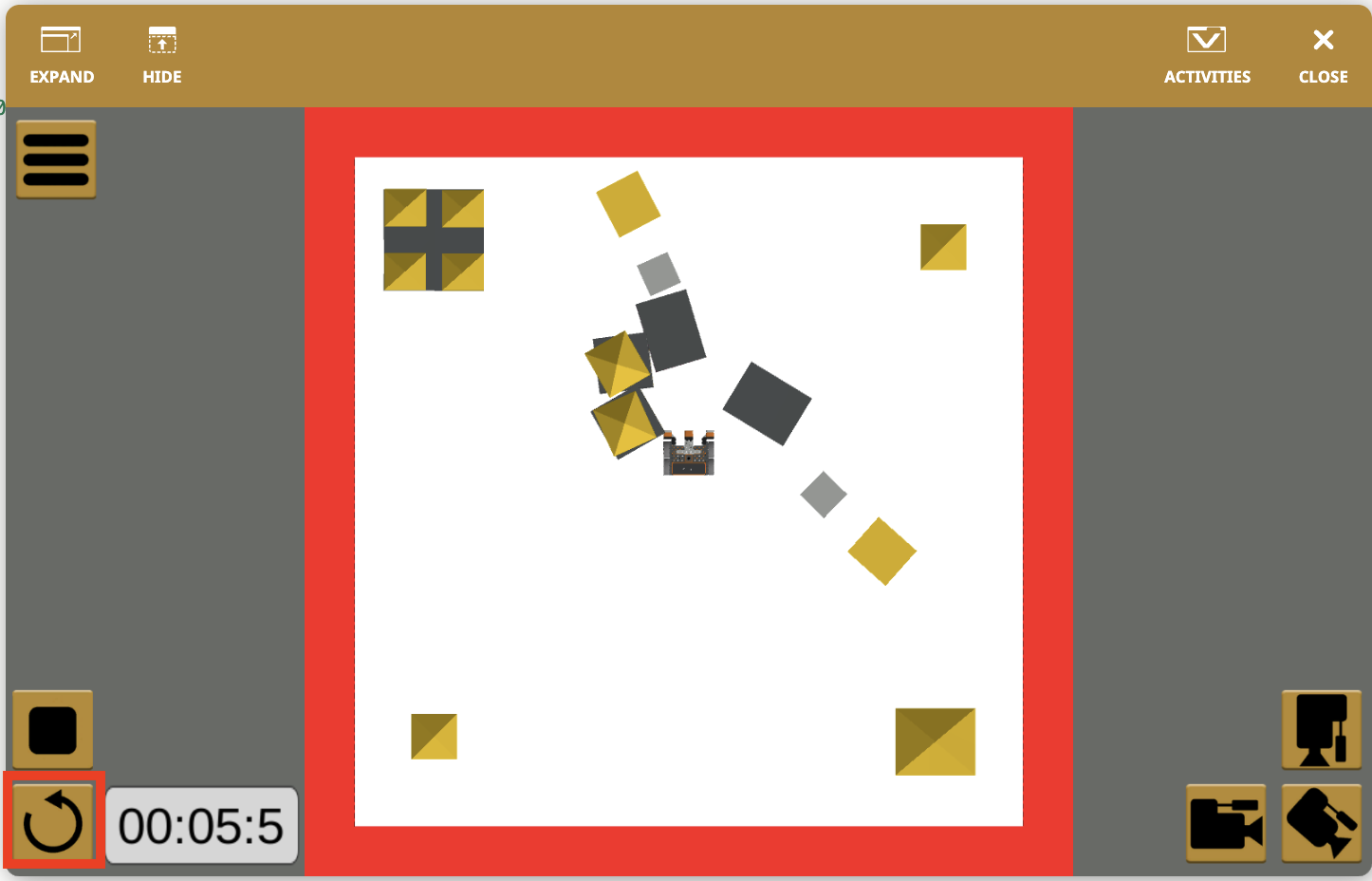
VR 로봇은 중앙의 성과 충돌하여 성의 일부를 쓰러뜨립니다.

- "재설정" 버튼을 선택하여 놀이터를 재설정하세요.
이제 VR 로봇은 시작 위치로 돌아가야 합니다. 추가로 drive_for명령을 사용하고 매개변수를 변경하여 역방향으로 구동하여 시작 위치로 돌아가도록 합니다. -
VEXcode VR 프로젝트에 두 번째 drive_for명령을 추가하고 방향을 "FORWARD"에서 "REVERSE"로 변경합니다. 이제 프로젝트는 다음과 같이 보일 것입니다.
# "main"에 프로젝트 코드 추가 def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 200, MM) -
시작 위치로 돌아가려면 거리 값이 첫 번째drive_for 명령인 800밀리미터(mm)와 같아야 합니다. 이제 프로젝트는 다음과 같이 보일 것입니다.
# "main"에 프로젝트 코드 추가 def main(): drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) - "시작" 버튼을 선택하고 프로젝트를 실행합니다.

- VR 로봇은 800밀리미터(mm) 동안 앞뒤로 이동한 후 시작 위치로 돌아갑니다.

참고: 캐슬 크래셔 챌린지의 첫 번째 부분을 성공적으로 완료했습니다! 중앙성의 네 부분이 모두 완전히 무너지지 않았더라도 약간이라도 옮겨진 상태라면 괜찮습니다.
귀하의 정보를 위해
VR 로봇을 서로 다른 속도로 전진 및 후진시키려면 set_drive_velocity명령을 사용하여 구동 속도를 높이거나 낮출 수 있습니다. set_drive_velocity명령은 속도 매개변수에 대해 0~100의 범위를 허용합니다. 기본 속도는 50%입니다. 속도 변경은 이후의 모든 Drivetrain 명령에 적용됩니다.
구동계.구동_속도_설정(50, 퍼센트)프로젝트 저장
프로젝트를 저장하려면 "파일" 드롭다운 메뉴에서 "다른 이름으로 저장"을 선택하세요.
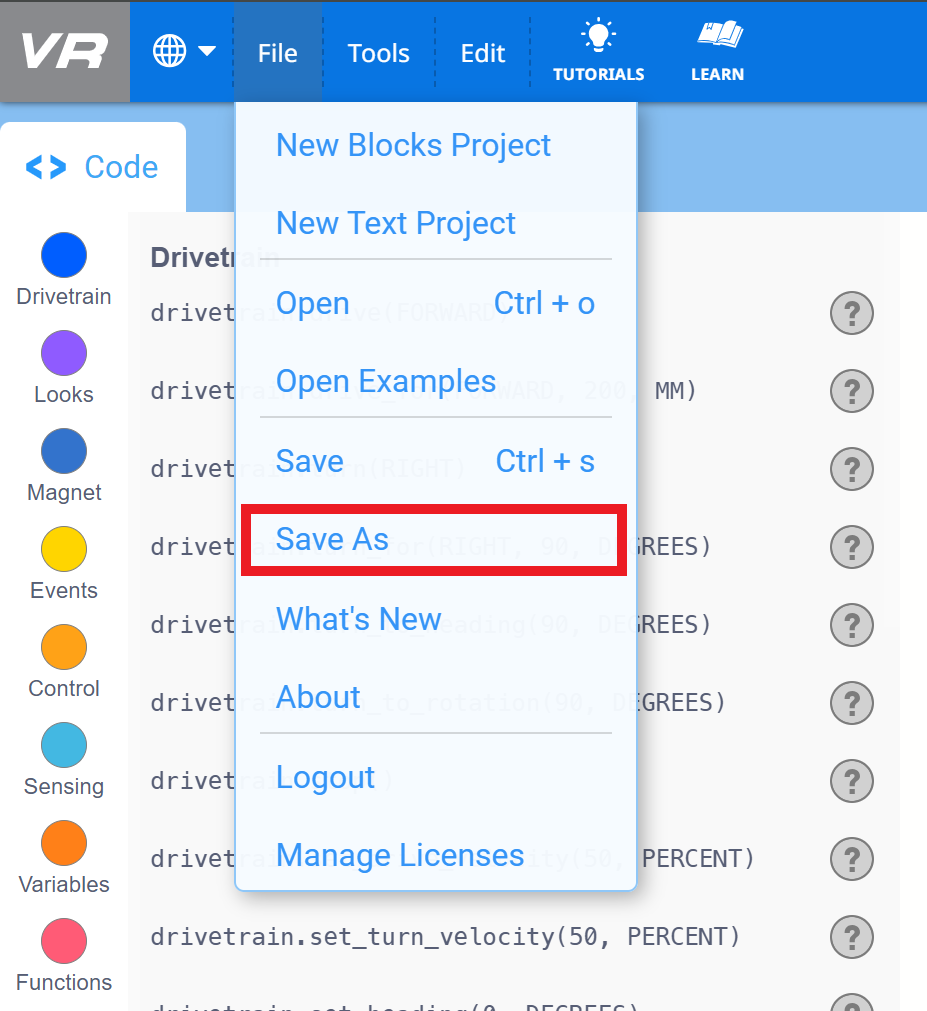
저장하면 프로젝트가 장치의 다운로드 폴더에 .vrpython 파일로 나타납니다.