
Leçon 2 : Modifier les paramètres dans le lecteur pour la commande
Le robot VR n'a pas touché le château central dans le dernier projet. Il doit voyager plus loin. Ajustez les paramètres, testez-le et regardez le robot VR renverser le château central !
-
Définissez la distance sur laquelle le robot VR se déplacera en entrant la valeur « 800 » comme deuxième paramètre dans la commande drive_for . Votre projet devrait maintenant ressembler à ceci :
# Add project code in "main" def main() : drivetrain.drive_for(FORWARD, 800, MM)
Pour votre information
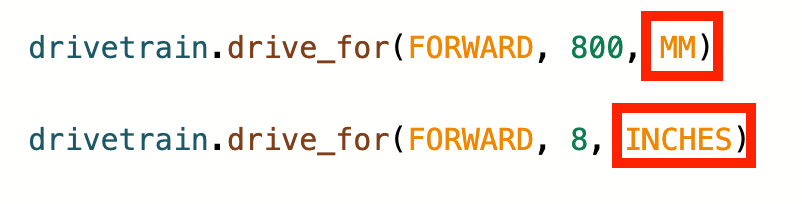
La commande drive_for peut accepter à la fois des nombres entiers (entiers) et des décimales (flottants). Les unités peuvent également être changées de millimètres (mm) en pouces.
- Démarrez le projet.

-
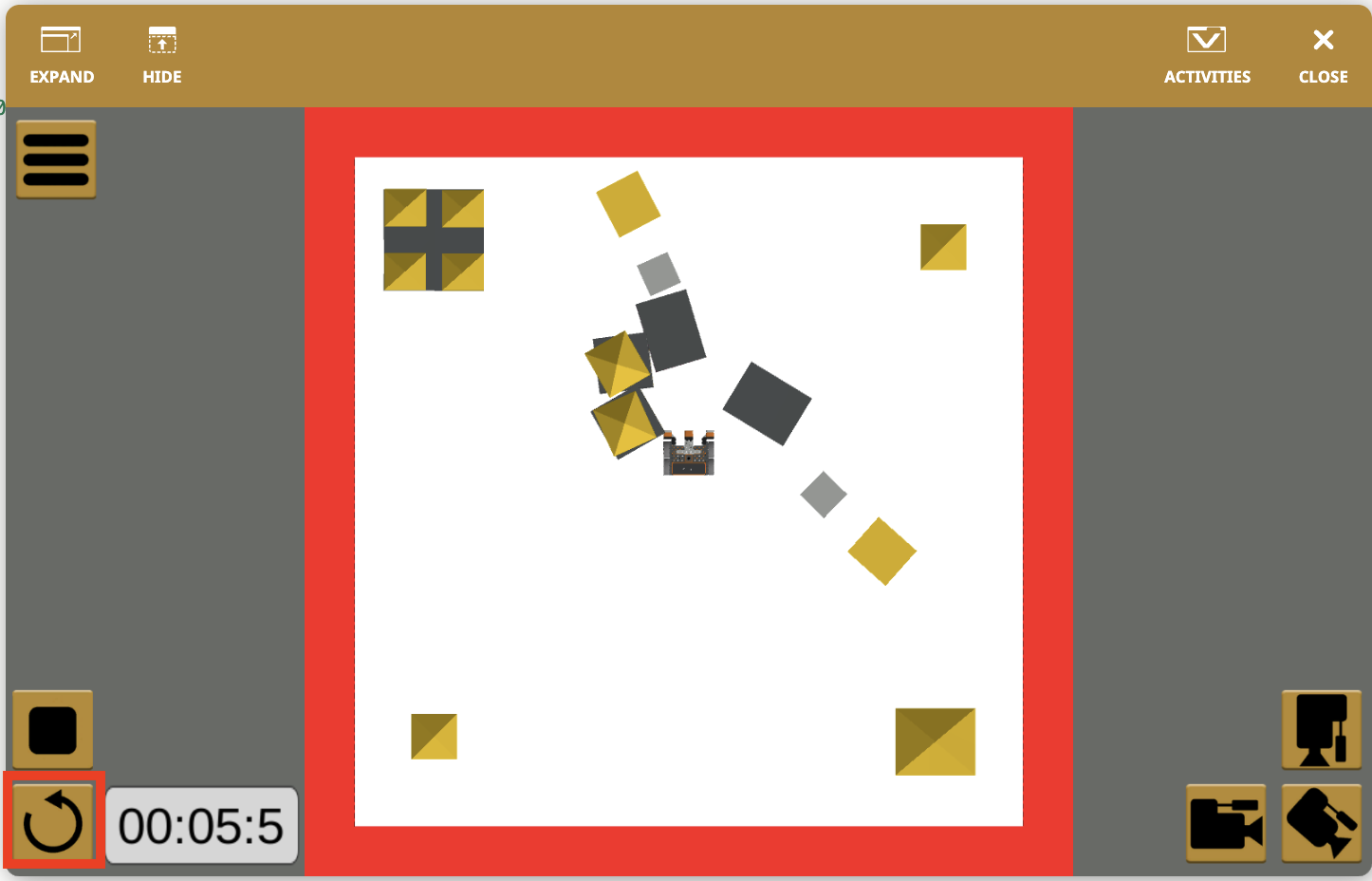
Le robot VR entrera en collision avec le château central et en renversera certaines parties.

- Sélectionnez le bouton « Réinitialiser » pour réinitialiser le terrain de jeu.
Le robot VR doit maintenant revenir à la position de départ. Utilisez une commande supplémentaire drive_for et modifiez les paramètres pour qu'elle conduise en marche arrière pour revenir à la position de départ. -
Ajoutez une deuxième commande drive_for au projet VEXcode VR et changez la direction de « AVANT » à « ARRIÈRE ». Votre projet devrait maintenant ressembler à ceci :
# Add project code in "main" def main() : drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 200, MM) -
Assurez-vous que la valeur de distance est la même que la première commande drive_for , 800 millimètres (mm), afin qu'elle revienne à la position de départ. Votre projet devrait maintenant ressembler à ceci :
# Add project code in "main" def main() : drivetrain.drive_for(FORWARD, 800, MM) drivetrain.drive_for(REVERSE, 800, MM) - Sélectionnez le bouton « Démarrer » et exécutez le projet.

- Le robot VR se déplacera vers l'avant et vers l'arrière sur 800 millimètres (mm), revenant à la position de départ.

Remarque: vous avez terminé avec succès la première partie du Castle Crasher Challenge ! Même si les quatre parties du château central ne sont pas complètement renversées, si elles sont légèrement déplacées, c'est acceptable.
Pour votre information
Pour faire avancer et reculer un robot VR à des vitesses différentes, la vitesse de déplacement peut être augmentée ou diminuée à l'aide de la commande set_drive_velocity . La commande set_drive_velocity accepte une plage de 0 à 100 pour le paramètre de vitesse. La vitesse par défaut est de 50 %. La modification de la vitesse s'appliquera à toutes les commandes ultérieures du groupe motopropulseur.
drivetrain.set_drive_velocity(50 %)Enregistrer votre projet
Pour enregistrer votre projet, sélectionnez « Enregistrer sous » dans le menu déroulant « Fichier ».
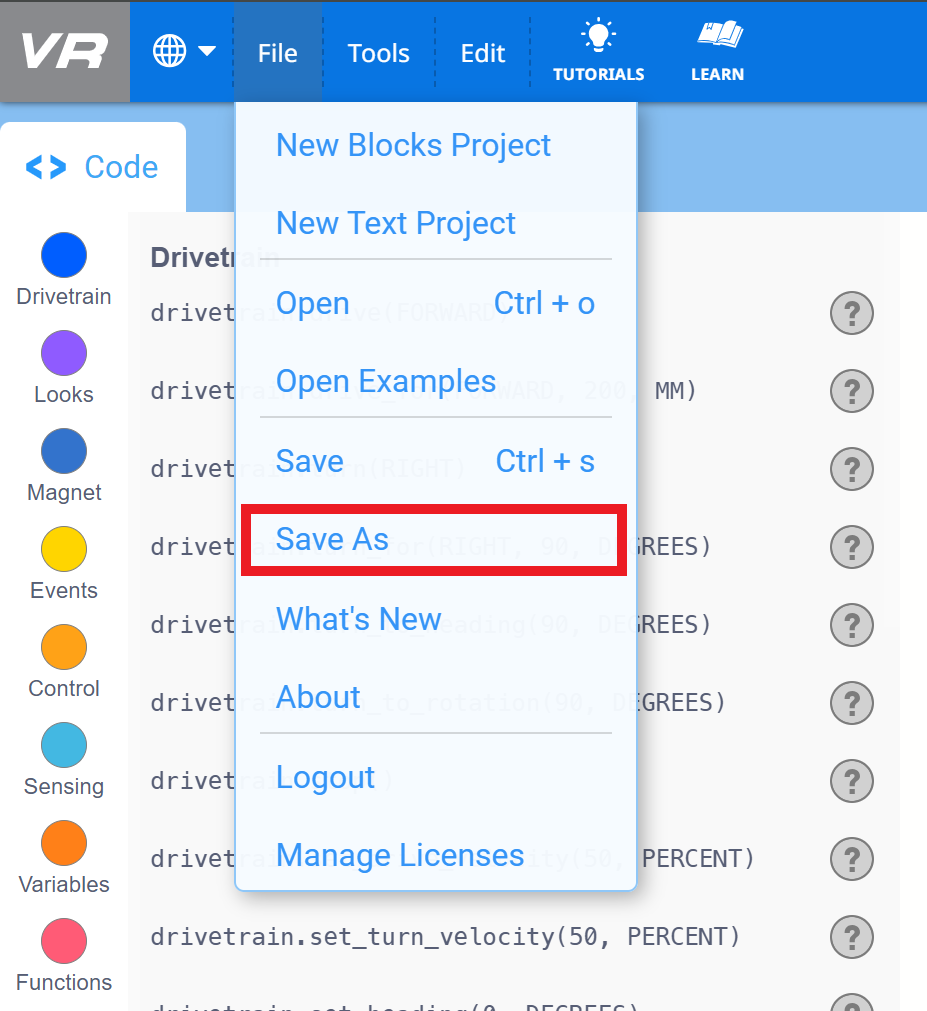
Une fois enregistré, le projet apparaîtra dans le dossier Téléchargements de votre appareil en tant que fichier .vrpython.
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf