Auf und darüber
6 Unterricht
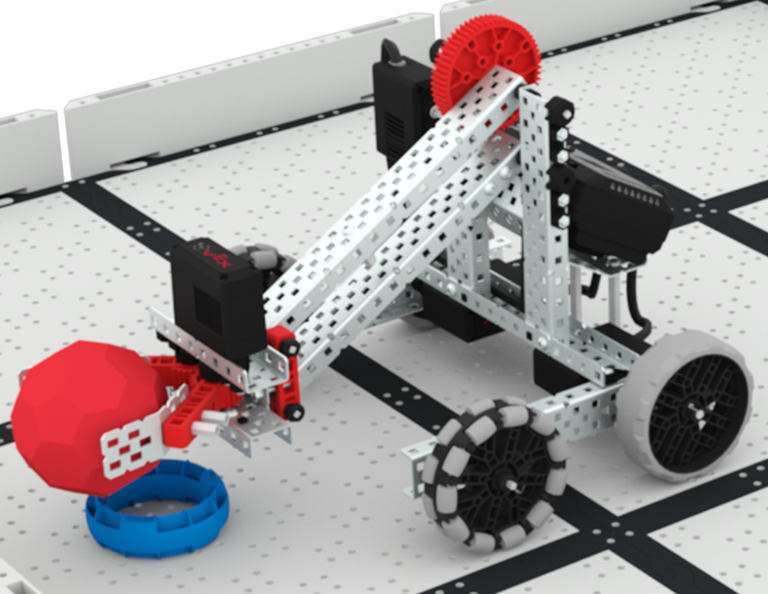
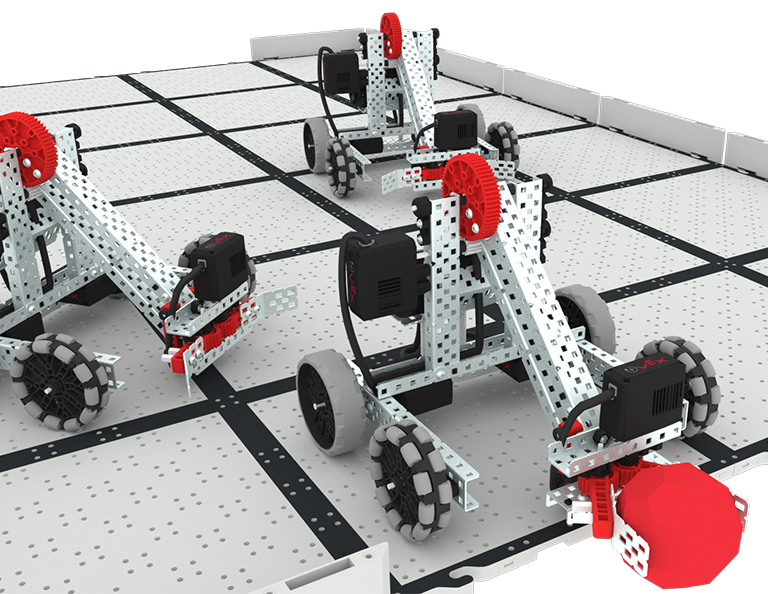
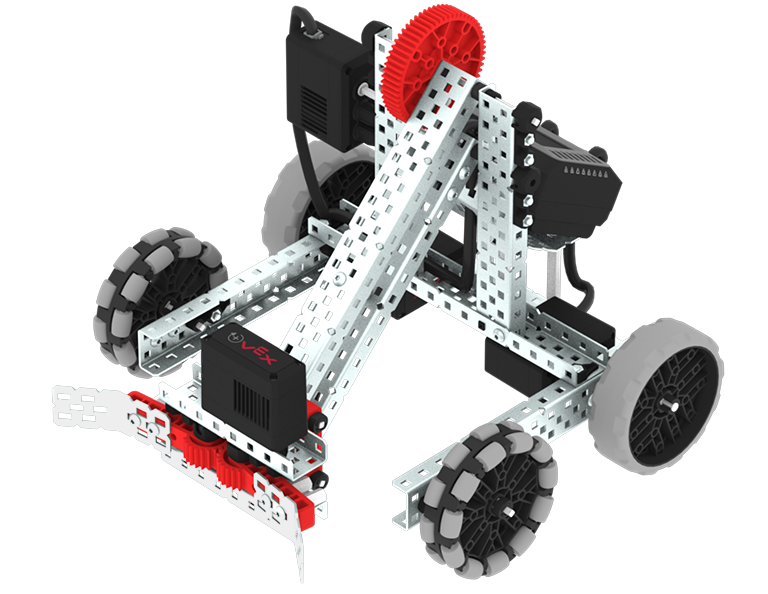
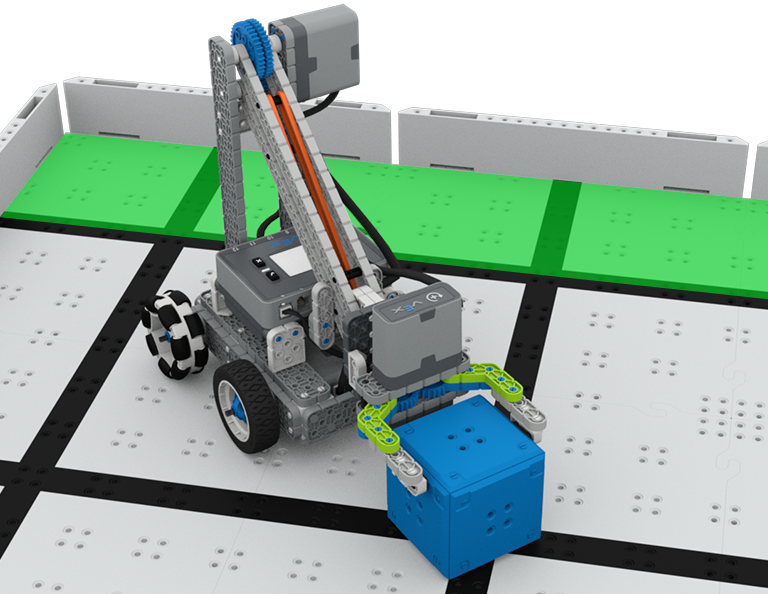
In dieser Einheit erkunden Sie, wie Sie einen Clawbot entwerfen, der im Up and Over-Wettbewerb Buckyballs sammelt, aufhebt und von einer Seite des Feldes zur anderen bewegt!
Besuchen Sie das Lehrerportal für Lehrerunterstützungsmaterialien und Videos zum Inhalt und zur Moderation der Up and Over-Lektionen.
Lektion 1: Einführung
In dieser Lektion lernen Sie den Up-and-Over-Wettbewerb kennen, richten den Akku und den Controller ein, bereiten sich auf den Code vor und bauen den Clawbot.
Lektion 2: Klauen-Design
In dieser Lektion erfahren Sie, was eine Klaue ist, wie eine effektive Klaue funktioniert und wie Scouting den Designs und der Strategie Ihres Teams zugute kommen kann. Dann werden Sie das Gelernte in der Grab and Go-Challenge anwenden.
Lektion 3: Armdesigns
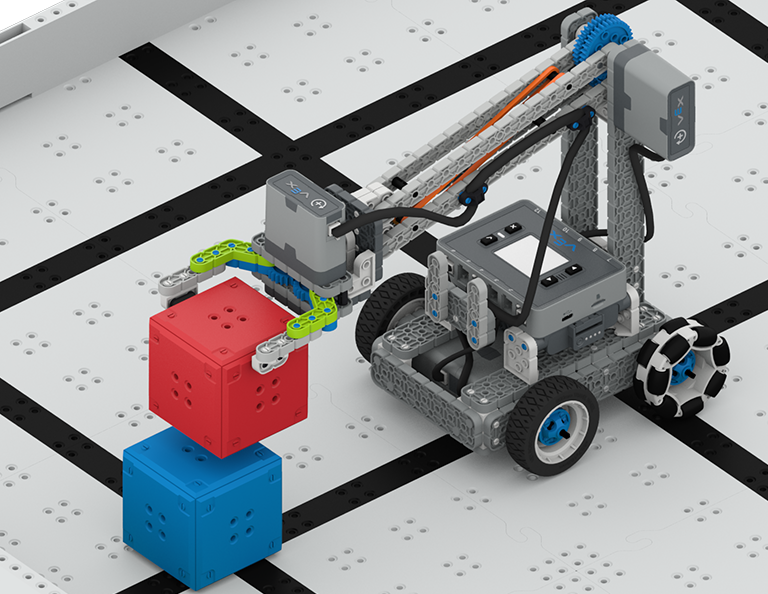
In dieser Lektion lernen Sie verschiedene Elemente von Roboterarmen kennen, einschließlich ihrer Funktionsweise und was ein effektives Armdesign ausmacht. Dann entwirfst und baust du einen Arm für deinen Roboter, um Buckyballs in Ringen für die Stacked Up-Herausforderung zu stapeln.
Lektion 4: Motorgruppen
In dieser Lektion erfahren Sie, was Motorgruppen sind, wie sie hilfreich sein können und wie Sie Motorgruppen in VEXcode EXP konfigurieren können, um Ihren Roboter zu iterieren, um die Up-and-Over-Herausforderung abzuschließen.
Lektion 5: Auf und Ab im Wettbewerb
In dieser Lektion wendest du deine Erkenntnisse aus den vorherigen Lektionen an, um im Auf und Ab-Wettbewerb anzutreten!

Lektion 6: Fazit
In dieser Lektion reflektieren Sie über die Einheit und identifizieren Zusammenhänge zwischen dem, was Sie getan haben, und einer MINT-Karriere.
Roboterfußball
4 Unterricht
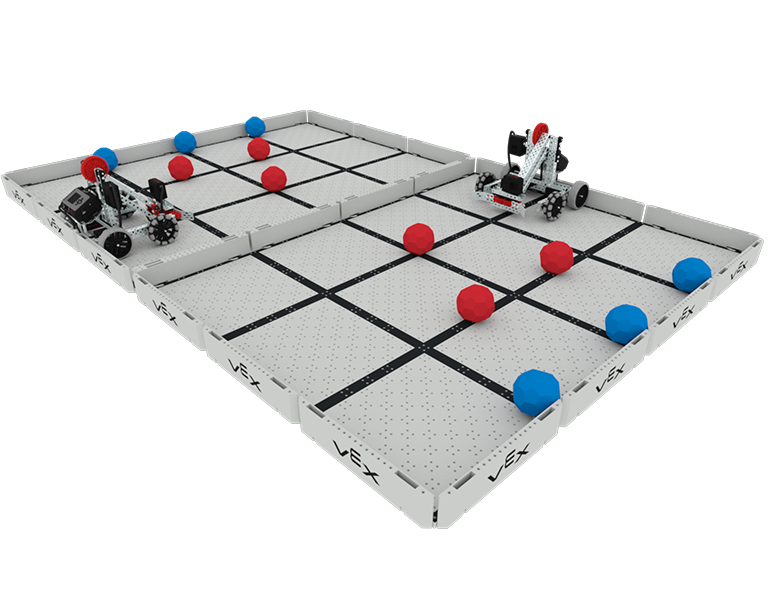
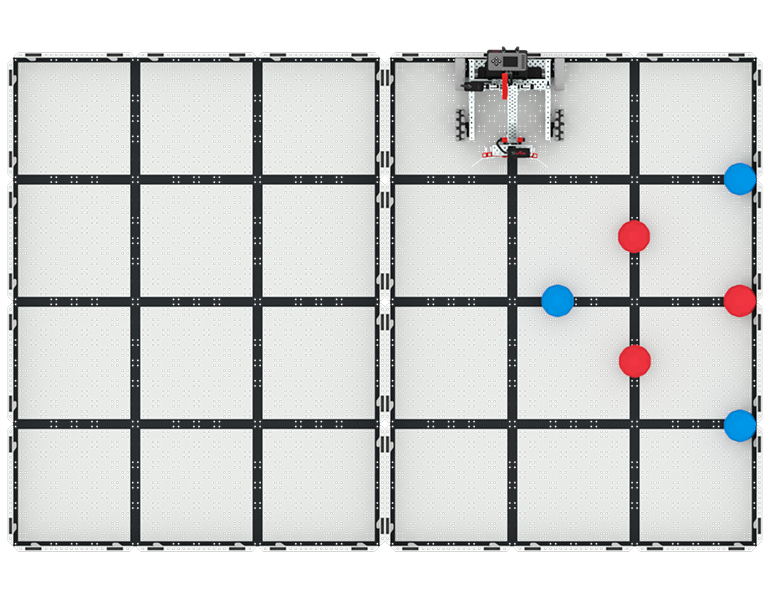
In dieser Einheit erfahren Sie, wie Sie an Ihrem Roboter einen Manipulator erstellen, mit dem er als Roboterfußballspieler im Roboterfußballwettbewerb die meisten Tore fangen, passen und schießen kann!
Besuchen Sie das Lehrerportal für Lehrerunterstützungsmaterialien und Videos zum Inhalt und zur Durchführung der Roboterfußball-Lektionen.
Lektion 1: Einführung
In dieser Lektion bauen Sie den Clawbot, laden Ihren Controller und Akku auf und bereiten sich auf den Code vor.

Lektion 2: Manipulatoren
In dieser Lektion lernen Sie passive und aktive Manipulatoren und Einlassdesigns kennen, um Ihr Roboterdesign zu iterieren und an einer One-on-One Robot Soccer Challenge teilzunehmen!
Lektion 3: Roboter-Fußball-Wettbewerb
In dieser Lektion wendest du deine Erkenntnisse aus der vorherigen Lektion an, um am Roboterfußball-Wettbewerb teilzunehmen!
Lektion 4: Fazit
In dieser Lektion werden Sie über die Einheit nachdenken und Zusammenhänge zwischen dem, was Sie getan haben, und einer damit VERBUNDENEN MINT-KARRIERE identifizieren.

Auf und ab
6 Unterricht
In dieser Einheit erfahren Sie, wie Sie einen Clawbot entwerfen, der im Up and Over-Wettbewerb Würfel sammelt, aufnimmt und von einer Seite des Spielfelds zur anderen bewegt!
Besuchen Sie das Lehrerportal für Lehrerunterstützungsmaterialien und Videos zum Inhalt und zur Moderation der Up and Over-Lektionen.

Lektion 1: Einführung
In dieser Lektion lernen Sie den Up-and-Over-Wettbewerb kennen, richten den Akku und den Controller ein, bereiten sich auf den Code vor und bauen den Clawbot.
Lektion 2: Klauen-Design
In dieser Lektion erfahren Sie, was eine Klaue ist, wie eine effektive Klaue funktioniert und wie Scouting den Designs und der Strategie Ihres Teams zugute kommen kann. Dann werden Sie das Gelernte in der Grab and Go-Challenge anwenden.
Lektion 3: Armdesigns
In dieser Lektion lernen Sie verschiedene Elemente von Roboterarmen kennen, wie sie funktionieren und was ein effektives Armdesign ausmacht, um so viele Würfel wie möglich innerhalb einer Minute in der Stacked Up-Herausforderung zu stapeln.
Lektion 4: Motorgruppen
In dieser Lektion erfahren Sie, was Motorgruppen sind, wie sie hilfreich sein können und wie Sie Motorgruppen in VEXcode IQ konfigurieren können, um Ihren Roboter zu iterieren, um die Auf- und Über-Herausforderung abzuschließen.
Lektion 5: Auf und Ab im Wettbewerb
In dieser Lektion wendest du deine Erkenntnisse aus den vorherigen Lektionen an, um im Auf und Ab-Wettbewerb anzutreten!

Lektion 6: Fazit
In dieser Lektion reflektieren Sie über die Einheit und identifizieren Zusammenhänge zwischen dem, was Sie getan haben, und einer MINT-Karriere.
Roboterfußball
4 Unterricht
In dieser Einheit erfahren Sie, wie Sie einen Manipulator auf Ihrem Roboter erstellen, um als Roboter-Fußballspieler im Roboter-Fußball-Wettbewerb die meisten Tore zu greifen, zu passen und zu schießen!
Besuchen Sie das Lehrerportal für Lehrerunterstützungsmaterialien und Videos zum Inhalt und zur Durchführung der Roboterfußball-Lektionen.
Lektion 1: Einführung
In dieser Lektion bauen Sie den Simple Clawbot, laden Ihren Controller und Akku auf und bereiten sich auf den Code vor.
Lektion 2: Manipulatoren
In dieser Lektion lernen Sie passive und aktive Manipulatoren sowie Einlassdesign kennen, um Ihr Roboterdesign zu verbessern und an einer Eins-gegen-Eins-Roboterfußball-Herausforderung teilzunehmen!
Lektion 3: Roboter-Fußball-Wettbewerb
In dieser Lektion wendest du deine Erkenntnisse aus der vorherigen Lektion an, um am Roboterfußball-Wettbewerb teilzunehmen!
Lektion 4: Fazit
In dieser Lektion werden Sie über die Einheit nachdenken und Zusammenhänge zwischen dem, was Sie getan haben, und einer damit VERBUNDENEN MINT-KARRIERE identifizieren.

Würfelsammler
6 Unterricht
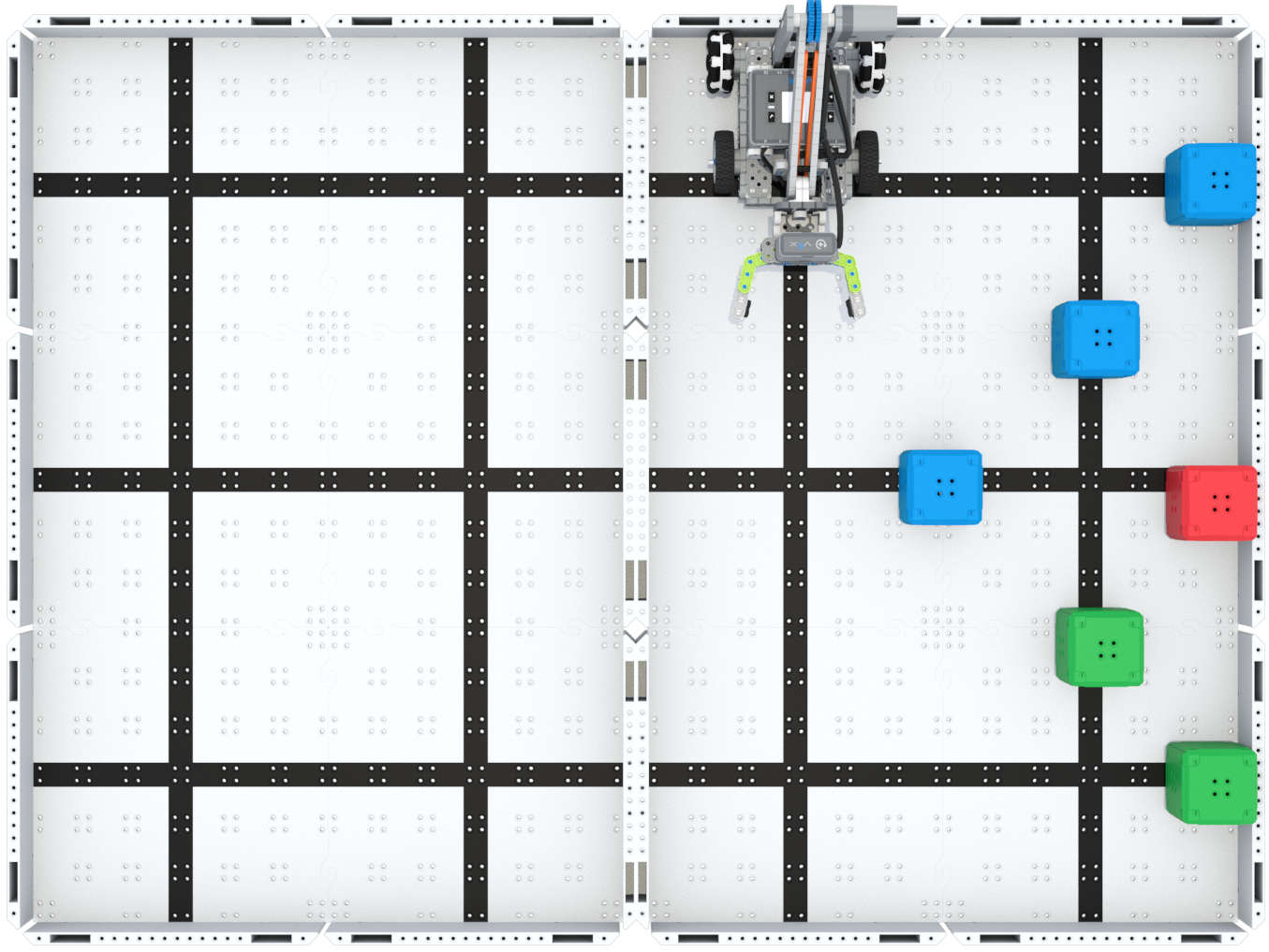
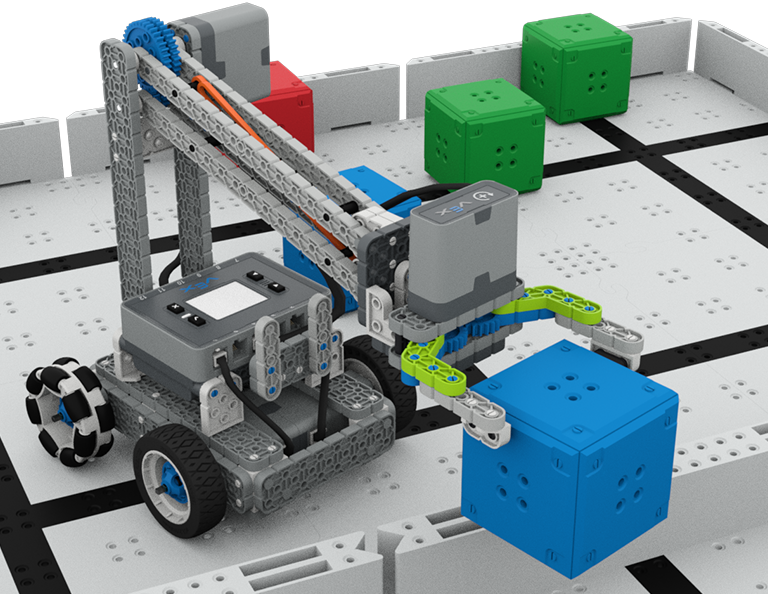
In dieser Einheit erkunden Sie den Unterschied zwischen Fahrersteuerung und autonomen Herausforderungen, während Sie lernen, den Clawbot zu steuern und ihn zu programmieren, um Würfel im Cube Collector-Wettbewerb zu sortieren und zu stapeln!
Besuchen Sie das Lehrerportal für Lehrerunterstützungsmaterialien und Videos zum Inhalt und zur Durchführung der Cube Collector-Lektionen.
Lektion 1: Einführung
In dieser Lektion werden Sie in den Cube Collector-Wettbewerb eingeführt, bauen den Clawbot und bereiten sich auf den Code vor.

Lektion 2: Fahrerkontrolle
In dieser Lektion erfahren Sie, wie Sie das Driver Control-Programm auf dem IQ Brain verwenden, damit Sie den Clawbot fahren können, um Würfel auf dem Feld zu stapeln und zu punkten und an der Speed Stack Challenge teilzunehmen.

Lektion 3: Codierung für autonome Bewegungen
In dieser Lektion erfahren Sie, wie Sie Ihren Roboter für autonome Bewegungen codieren und wie Sie den Weg Ihres Roboters planen. Anschließend erstellen Sie ein VEXcode IQ-Projekt, um Würfel in der autonomen Herausforderung Coding for Cubes zu bewerten und zu stapeln.

Lektion 4: Verwenden mehrerer Programme (autonom & Fahrer)
In dieser Lektion erfahren Sie, wie Sie die Fahrersteuerung anpassen und wie Sie den Controller und den VEXcode IQ verwenden können, um Ihre Fahrerstrategie für den Wettbewerb in einer Herausforderung mit Fahrersteuerung und autonomen Läufen zu optimieren.

Lektion 5: Cube-Sammler-Wettbewerb
In dieser Lektion wendest du deine Erkenntnisse aus den vorherigen Lektionen an, um am Cube Collector-Wettbewerb teilzunehmen!

Lektion 6: Fazit
In dieser Lektion werden Sie über die Einheit nachdenken und Zusammenhänge zwischen dem, was Sie getan haben, und einer damit VERBUNDENEN MINT-KARRIERE identifizieren.

Schloss-Crasher
6 Unterricht
In dieser Einheit erfahren Sie, wie Sie mithilfe der optischen und Entfernungssensoren Würfelburgen suchen, zum Einsturz bringen und räumen können, um beim Castle Crasher-Wettbewerb Punkte zu erzielen!
Besuchen Sie das Lehrerportal für Lehrerunterstützungsmaterialien und Videos zum Inhalt und zur Durchführung der Castle Crasher-Lektionen.

Lektion 1: Einführung
In dieser Lektion lernen Sie den Castle Crasher-Wettbewerb kennen, bauen den BaseBot und bereiten sich auf den Code vor.

Lektion 2: Castle Crasher Keine Sensoren
In dieser Lektion lernen Sie, wie Sie Winkel berechnen und die Geschwindigkeit Ihres Roboters ändern, damit Sie an der Tower Over Challenge teilnehmen können.

Lektion 3: Castle Crasher + Abstandssensor
In dieser Lektion erfahren Sie, was der Abstandssensor ist und wie er an Ihrem Roboter verwendet werden kann. Sie erfahren auch mehr über den Block [Warten bis] und wie er in einem VEXcode IQ-Projekt verwendet werden kann. Dann wendest du an, was du gelernt hast, um an der Cube-Crasher-Herausforderung teilzunehmen!

Lektion 4: Erstellen von Algorithmen
In dieser Lektion erfahren Sie mehr über den optischen Sensor und darüber, wie Sie einen Algorithmus erstellen, der Sensorfeedback verwendet. Dann werden Sie Ihren Roboter so programmieren, dass er selbstständig Würfel findet und sie in der Sweep the Field Challenge vom Feld schiebt.

Lektion 5: Castle-Crasher-Wettbewerb
In dieser Lektion wendest du deine Erkenntnisse aus den vorherigen Lektionen an, um an einem Castle Crasher-Wettbewerb teilzunehmen!
Lektion 6: Fazit
In dieser Lektion reflektieren Sie über die Einheit und identifizieren Zusammenhänge zwischen dem, was Sie getan haben, und einer MINT-Karriere.
Schatzsuche
5 Unterricht
In dieser Einheit bauen und programmieren Sie den Simple Clawbot mit dem optischen Sensor, um rote Würfel zu erkennen und zu sammeln, um am Schatzsuche-Wettbewerb teilzunehmen!
Besuchen Sie das Lehrerportal für Lehrerunterstützungsmaterialien und Videos zum Inhalt und zur Durchführung der Schatzsuche-Lektionen.
Lektion 1: Einführung
Du wirst in den Schatzsuche-Wettbewerb eingeführt, baust den Einfachen Greiferbot und bereitest dich auf den Code vor.
Lektion 2: Klauen ohne Sensor
In dieser Lektion erfahren Sie, wie Sie Antriebsstrang- und Bewegungsblöcke in VEXcode IQ verwenden, um Ihren einfachen Clawbot zu codieren, um Würfel in der Clawbot Collector-Herausforderung zu sammeln und zu bewegen.
Lektion 3: Klaue mit Sensor
In dieser Lektion erfährst du, wie du den optischen Sensor codierst, um einen roten Würfel in der Treasure Mover-Herausforderung zu erkennen, zu sammeln und zu bewegen!
Lektion 4: Schatzsuche-Wettbewerb
In dieser Lektion wendest du deine Erkenntnisse aus den vorherigen Lektionen an, um an einem Schatzsuche-Wettbewerb teilzunehmen!
Lektion 5: Fazit
In dieser Lektion reflektieren Sie über die Einheit und identifizieren Zusammenhänge zwischen dem, was Sie getan haben, und einer MINT-Karriere.