
Antecedentes
La Unidad Little Red Robot utiliza la historia de Little Red Riding Hood como vehículo para introducir los conceptos de codificación de secuencia, selección e iteración, los componentes básicos de un algoritmo. Los estudiantes explorarán la secuencia en el Laboratorio 1, codificando su Little Red Robot para conducir a la casa de la abuela usando diferentes secuencias de tarjetas Drive Coder. En el laboratorio 2, explorarán la selección, utilizando la tarjeta codificadora "Conducir hasta el objeto" y el sensor ocular para hacer que el robot conduzca hasta que se detecte un objeto. En el Laboratorio 3, los estudiantes se basarán en sus proyectos para añadir un condicional utilizando las tarjetas de Codificador "If red", "Else" y "End if". Luego explorarán la iteración, utilizando la tarjeta "Ir al inicio" para crear un "Algoritmo de detección de lobos".
¿Qué es un algoritmo?
Los algoritmos le permiten codificar su robot para que tome decisiones de forma autónoma en respuesta a los datos de su entorno. Un algoritmo es un conjunto preciso de instrucciones que utiliza secuencia, selección e iteración (o bucles) para permitir que tu robot complete tareas más desafiantes, incluso si el entorno cambia.
- La secuencia es el orden en que se ejecutan los comandos, uno tras otro. Cada vez que los estudiantes codifican el Robot 123, secuencian las tarjetas de Codificador en el orden correcto para lograr su objetivo.
- La selección se refiere al uso de datos de sensores para tomar una decisión dentro de un proyecto. Esto ocurre cuando los estudiantes codifican el robot 123 para usar datos del sensor ocular, como lo hacen en los laboratorios 2 con la tarjeta codificadora "Conducir hasta el objeto", y en el laboratorio 3 cuando codifican el robot para realizar diferentes comportamientos en función del color del objeto detectado.
- La iteración es la repetición de comportamientos en un proyecto. Los estudiantes crean un "bucle" (o iteración) en sus proyectos cuando añaden la tarjeta codificadora "Go to start" para repetir su proyecto, como lo hacen en el Laboratorio 3.
Secuencia - ¿Cómo se utiliza la secuenciación en esta unidad?
La secuencia es el orden en que se ejecutan las tarjetas Codificador en un proyecto. Las tarjetas del codificador se ejecutan comenzando con la tarjeta insertada en la parte superior del codificador, y luego bajando de una en una.
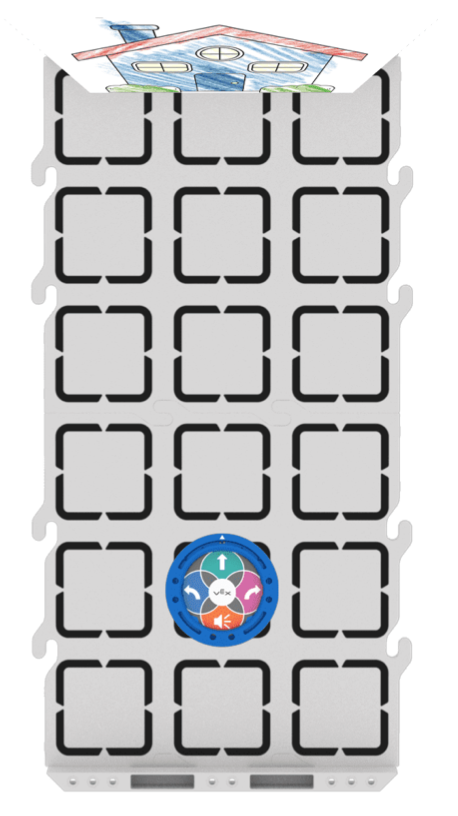
En esta animación, puedes ver cómo comienza el proyecto con la tarjeta "When start 123" en la parte superior del Codificador, luego cada tarjeta del Codificador se ejecuta en orden de arriba a abajo. El Robot 123 avanza cuatro espacios en un Campo 123. La función de resaltado verde a la izquierda del codificador indica qué tarjeta de codificador individual se está ejecutando en ese momento. Esto puede proporcionar a los estudiantes retroalimentación inmediata para conectar los comportamientos del Robot 123 con tarjetas de Codificador específicas.
Pasos para planificar y secuenciar tarjetas de codificador en un proyecto
-
Primero, identifique el objetivo: ¿qué debe hacerse? Por ejemplo, conduce desde el principio hasta la casa de la abuela.
- Luego, desglosa los pasos necesarios para lograr el objetivo e identifica las tarjetas de Codificador necesarias para lograr estos pasos. Aquí tendrás que avanzar cuatro pasos para llegar a la casa de la abuela. Esto se puede lograr con cuatro tarjetas "Drive 1".
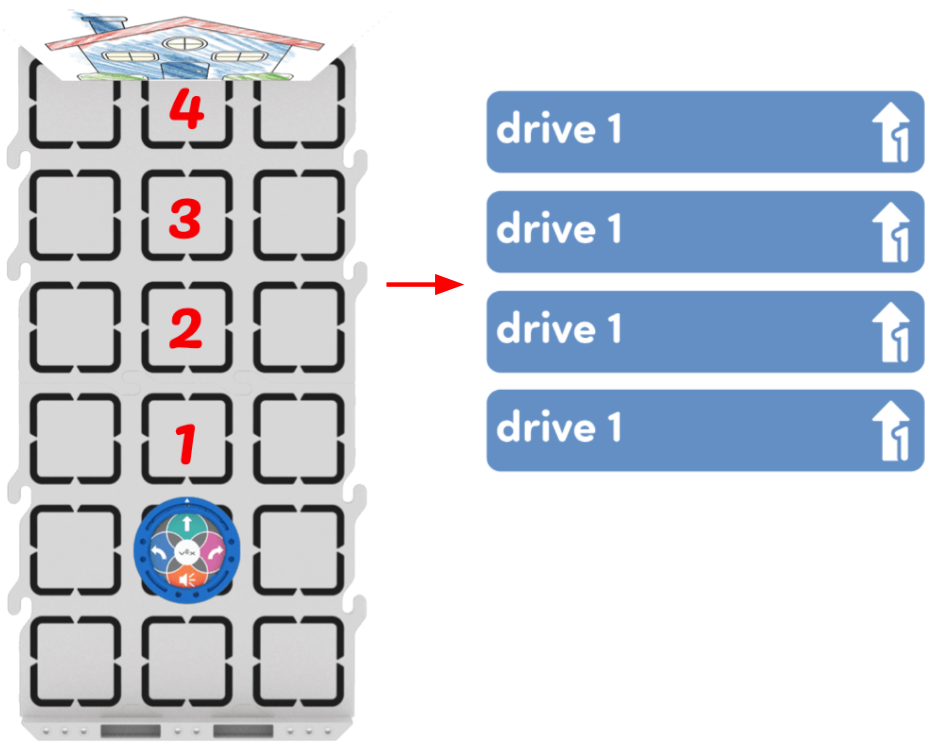
- A continuación, planifique la secuencia del proyecto colocando las tarjetas del Codificador sobre la mesa. Una vez que esté satisfecho con su plan de proyecto, inserte las tarjetas del Codificador en el Codificador comenzando desde arriba y trabajando hacia abajo.
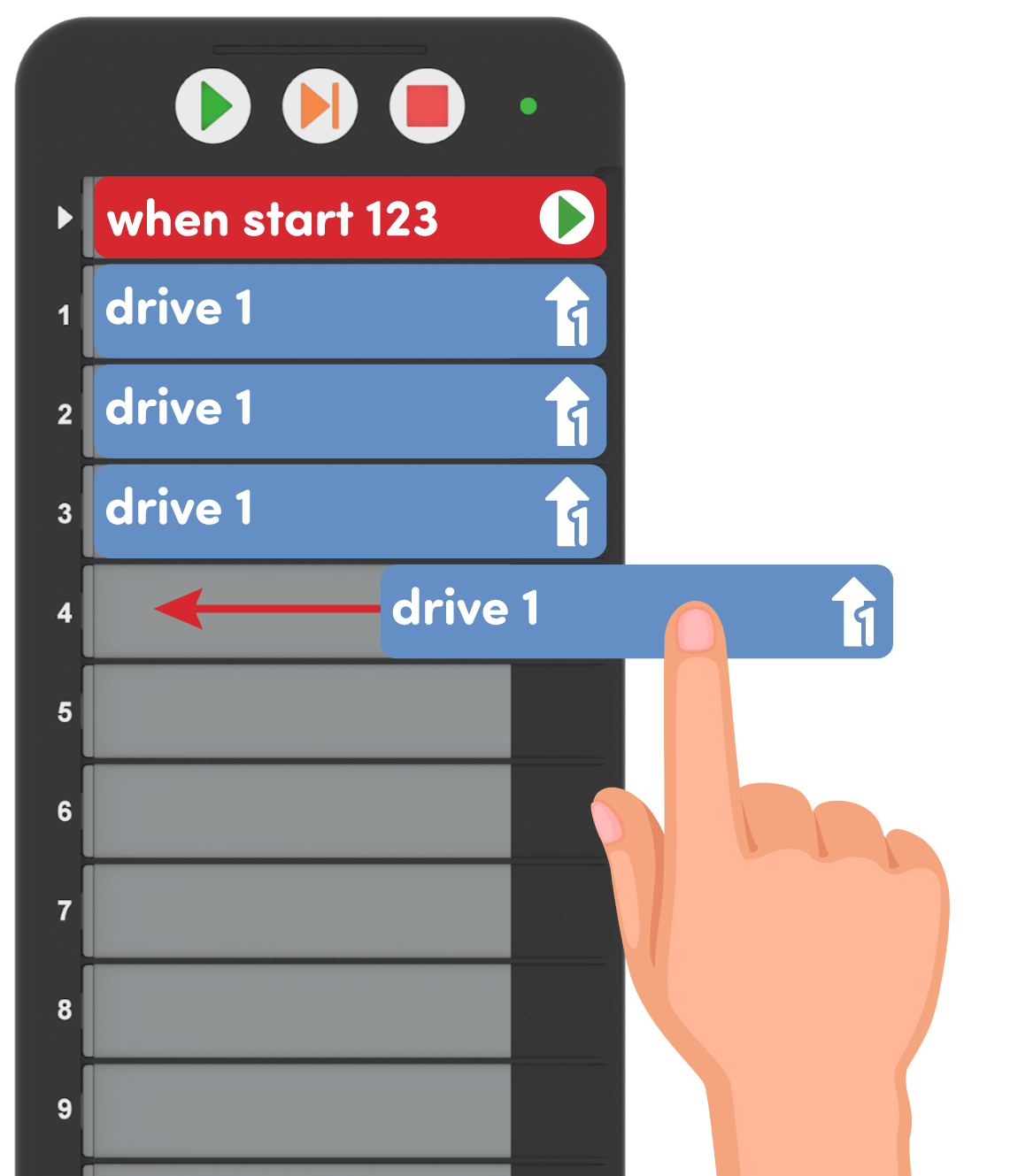
- Seleccione "Iniciar" para probar el proyecto y ver si el Robot 123 logra el objetivo identificado en el primer paso.

Si desea cambiar su proyecto, simplemente elimine las tarjetas del Codificador, reorganice las tarjetas e insértelas de nuevo en el Codificador para actualizar su proyecto.
Selección - ¿Qué es un sensor?
Un sensor es, en esencia, un dispositivo que ayuda a un robot a comprender el mundo que lo rodea. Lo hace recopilando e informando datos sobre su entorno, que luego se pueden usar en un proyecto para que el robot tome decisiones o realice ciertos comportamientos. Esta secuencia puede considerarse como un bucle de decisión de Sense → Think → Act.
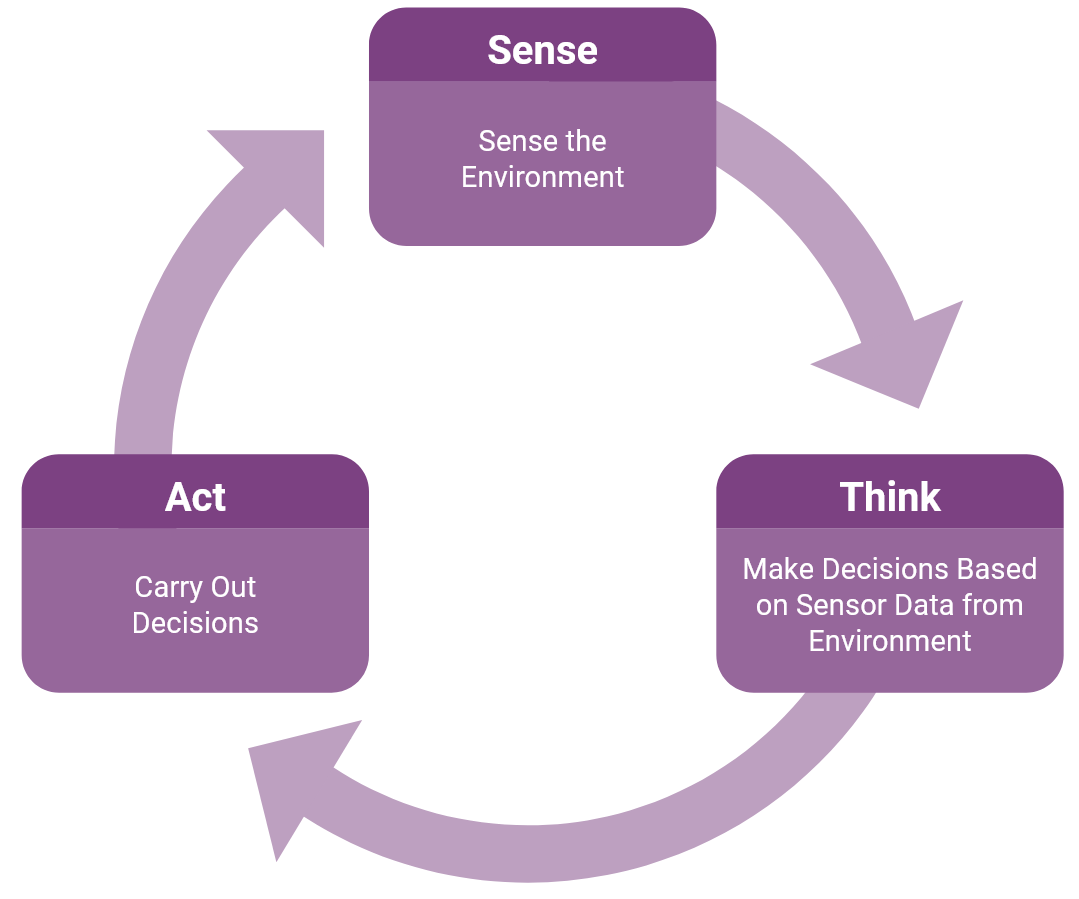
Un Robot 123 utiliza sensores para recopilar datos de su entorno (Sense), tomar decisiones basadas en esta información (Think) y convertir esa información en instrucciones para comportamientos (Act).
En esta Unidad, los estudiantes codificarán el Robot 123 para detectar al Lobo en su camino hacia la casa de la Abuela. El proyecto que crean los estudiantes lleva a cabo el bucle de decisión Sense → Think → Act, ya que el sensor ocular "detectará" la presencia de un objeto (el "lobo"), luego "pensará" o tomará la decisión de dejar de conducir cuando se detecte el objeto, y luego el robot 123 actuará y dejará de avanzar.
¿Qué es el sensor ocular?
El sensor ocular del robot 123 se encuentra en el lado frontal, debajo de la flecha blanca. El sensor ocular se puede utilizar para detectar la presencia o ausencia de un objeto, así como su color o nivel de brillo.

En esta unidad, el sensor ocular se utilizará para detectar cuando un objeto (la casa de la abuela o el lobo) está presente en la trayectoria del robot 123. La posición del sensor ocular en el robot 123 significa que solo puede detectar objetos directamente frente a él. Tenga esto en cuenta cuando coloque sus 123 robots y lobos con sus estudiantes para que los materiales preparen a los estudiantes para el éxito.

Para obtener más información sobre cómo codificar el sensor ocular con el codificador, consulte el artículo Codificación del sensor ocular VEX 123 utilizando la biblioteca VEX del codificador.
¿Cómo funciona la tarjeta codificadora "Conducir hasta el objeto"?
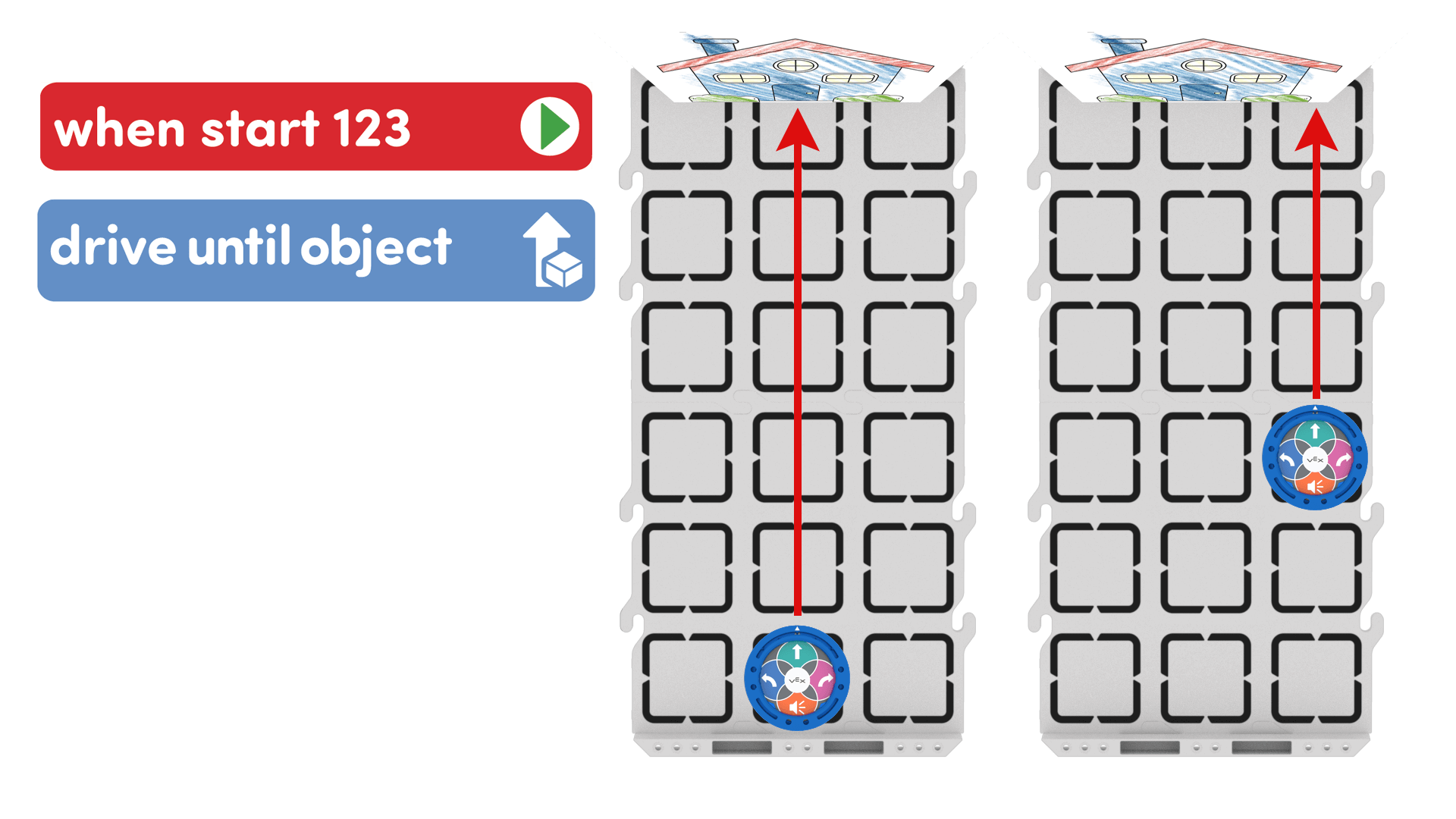
La tarjeta del codificador "Conducir hasta el objeto" utiliza los datos del sensor ocular para hacer que el 123 Robot Drive avance hasta que el sensor ocular informe que se detecta un objeto. Cuando se detecta un objeto, el Robot 123 dejará de conducir.
![]()
Esto es útil en un proyecto cuando se desconoce la ubicación exacta de un objeto u obstáculo, o no se puede planificar. En esta Unidad, los estudiantes primero usarán la tarjeta de Codificador "Conducir hasta el objeto" para ver que el Robot 123 puede conducir a la casa de la Abuela con éxito con el mismo proyecto, sin importar dónde comience su viaje.
¿Cómo funcionan juntas las tarjetas de codificador "If red", "Else" y "End if"?
Estas tarjetas del codificador se pueden utilizar para crear un proyecto en el que el robot utiliza los datos del sensor ocular sobre el color detectado para tomar una decisión y realizar diferentes comportamientos en función del color detectado.
En el Laboratorio 3, los estudiantes usarán el color del objeto detectado para codificar el Robot 123 para ahuyentar al lobo rojo o tocar el timbre de la casa de la abuela. Esto se estructura utilizando las tarjetas de codificador "If red", "Else" y "End if". Estas tarjetas trabajan juntas para formar una declaración condicional. Una instrucción condicional se utiliza para ejecutar una secuencia particular de instrucciones si se cumple la condición (reporting TRUE), y otro conjunto de instrucciones si NO se cumple la condición (reporting FALSE), "ramificando" así el flujo del proyecto. Solo se ejecutará una rama de la instrucción condicional cuando se ejecute el proyecto, lo que hará que el robot tome una decisión. En el Laboratorio 3, la condición que se está verificando es la condición de ser rojo (tarjeta codificadora "Si es rojo"). El objeto detectado se informará como rojo (VERDADERO) o como no rojo (FALSO).

La imagen de arriba muestra el proceso de toma de decisiones y cómo funciona la ramificación con el proyecto. El "Fin si" se utiliza para finalizar la declaración condicional y señalar que la parte de toma de decisiones del proyecto está completa: este es el final del proceso de toma de decisiones si. Cualquier comando añadido después de esta tarjeta se completará después de que se tome la decisión.

Esta animación muestra el proyecto del Laboratorio 3. Mira el resaltado en el codificador para ver cómo se mueve el flujo del proyecto a medida que se toma la decisión.
Iteración - ¿Cómo funciona la tarjeta del codificador "Go to start"?
La tarjeta del codificador "Go to start" crea un bucle para siempre, lo que hace que el proyecto regrese a la tarjeta del codificador "When start 123" y repita los comportamientos en secuencia para siempre, hasta que el proyecto se detenga.
Esto es útil en un proyecto para hacer que el robot repita continuamente los mismos comportamientos o tome la misma decisión una y otra vez. En el laboratorio 3, la tarjeta del codificador "Ir al inicio" se coloca después de que se detecta el objeto y se toma la decisión. Esto repite esa toma de decisiones una y otra vez, haciendo que el proyecto y el algoritmo.
Estrategias para enseñar con el codificador en esta unidad
El Codificador ofrece una oportunidad para que los alumnos y maestros interactúen y compartan el código de manera fácil y tangible a lo largo de las actividades de un Laboratorio.
Apoyo a los prelectores o primeros lectores : las tarjetas de codificación están diseñadas para apoyar a los prelectores, o primeros lectores, utilizando iconos para representar las palabras de la tarjeta en sí, para que los estudiantes puedan leer las imágenes si aún no pueden leer las palabras. Anime a los estudiantes a usar estas imágenes de iconos para ayudarlos mientras trabajan en la construcción de sus proyectos. Refuerza esto refiriéndote a las imágenes de las tarjetas del Codificador cuando las estés nombrando con los estudiantes, como "La tarjeta del Codificador Cuando se inicia 123, la que tiene la flecha verde, siempre va primero".

Compruebe y comparta el código fácilmente : una vez que las tarjetas del codificador se cargan en el codificador, los estudiantes pueden sostener su codificador para mostrar su código, tal como lo harían con una pizarra con una solución matemática. Utilice esta estrategia durante la instrucción en grupo, como un medio para verificar la precisión de los estudiantes antes de comenzar sus proyectos. Puede ver rápida y fácilmente si se utilizan las tarjetas Coder correctas, si se insertan en el orden correcto y asegurarse de que no estén al revés o al revés. Cuando se comunique con los grupos para facilitar la actividad independiente, consulte las tarjetas de Codificadores y Codificadores para verificar el progreso.
¿Qué tarjetas de Codificador necesitas?
Las tarjetas del codificador representan 123 comandos de robot que se insertan en el codificador y se utilizan para codificar el robot 123. A continuación se muestra una lista de las principales tarjetas de Codificador utilizadas durante esta Unidad. Consulte la sección Configuración del entorno del Resumen en cada Laboratorio para obtener información más detallada sobre la organización y distribución de tarjetas Coder a sus estudiantes.
| Tarjeta codificadora | Comportamiento | Ejemplo |
|---|---|---|
 |
Inicia el proyecto cuando se pulsa el botón ‘Start’ en el codificador. | |
 |
123 El robot avanzará 1 longitud de robot. Esto es igual a 1 cuadrado en el campo 123. |  |
 |
123 El robot avanzará 2 longitudes de robot. Esto es igual a 2 cuadrados en el campo 123. | 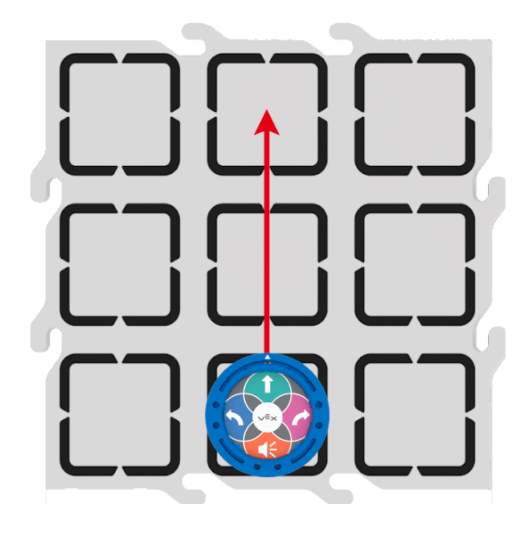 |
 |
123 El robot avanzará 4 longitudes de robot. Esto es igual a 4 cuadrados en el campo 123. |  |
 |
123 El robot avanzará hasta que el sensor ocular detecte un objeto. | 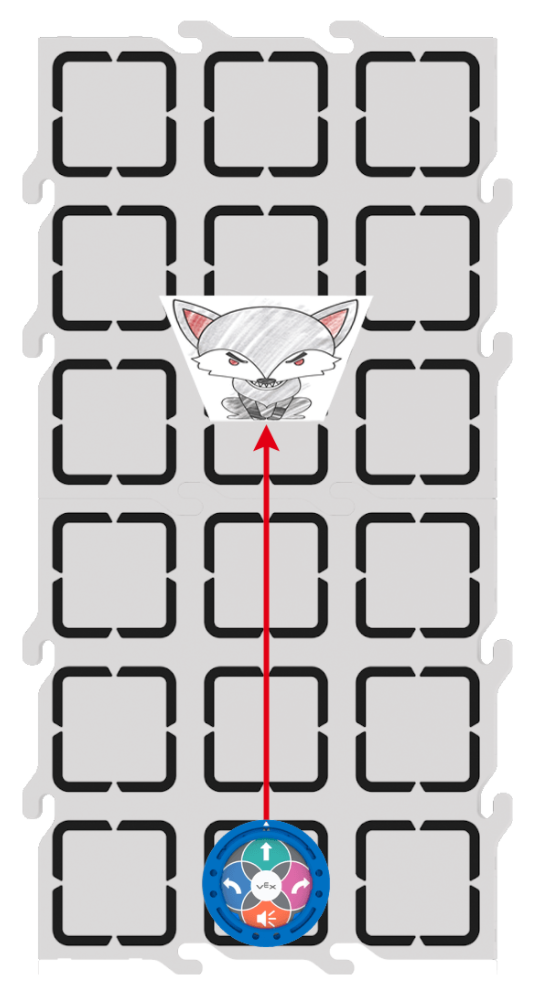 |
 |
Utiliza el sensor ocular para comprobar si se detecta el color rojo. | |
 |
Se utiliza junto con una tarjeta codificadora "If". La tarjeta codificadora 'Else' ejecutará las tarjetas codificadoras bajo el 'Else' si no se cumple la condición de la tarjeta codificadora 'If'. | |
 |
Finaliza una secuencia de tarjetas de codificador 'If' y 'Else' | |
 |
El codificador volverá a la tarjeta del codificador «When start 123» y continuará ejecutando el proyecto. |
Ofrezca a los estudiantes tarjetas de Codificador adicionales de las categorías Looks o Sounds para expandir sus proyectos y ahuyentar al Lobo en el Juego Parte 2 del Laboratorio 2. Para obtener una lista completa de las tarjetas codificadoras y sus comportamientos, consulte el artículo de la Biblioteca VEX de la Guía de referencia de tarjetas codificadoras VEX.
Solución de problemas del sensor ocular en el laboratorio 3
Si su proyecto en el laboratorio 3 no se está ejecutando según lo previsto, el problema puede estar en la forma en que el sensor ocular detecta los objetos y sus colores en su aula. Antes de solucionar el problema del sensor ocular, puede ser útil comprender un poco cómo funciona cuando se trata de la detección de color.
El sensor ocular detecta un "valor de tono" que se alinea con un color, no con un "color" específico. Hay muchos tonos de rojo, azul y verde, y cada uno tiene su propio valor de tono. Los colores que se informan como detectados por el sensor, en realidad son rangos de valor de tono que se correlacionan con 'rojo', 'azul' o 'verde'. El sensor ocular detecta el valor de tono del objeto frente a él, y si ese valor se encuentra dentro del rango alineado con 'rojo', 'azul' o 'verde', entonces el color se informa como tal.
Hay varias estrategias de solución de problemas que también puede intentar para que el proyecto funcione según lo previsto.
- Ajuste la luz ambiental : el sensor ocular del 123 Robot es sensible a la luz. Si la luz ambiental en la habitación es oscura o emite un tono amarillo, como podrían hacerlo las luces fluorescentes, puede afectar las lecturas de color del sensor ocular. Intente mover su configuración a un espacio más brillante en el aula o encienda luces adicionales para ver si eso ayuda al robot a detectar los colores con mayor precisión.
- Pruebe la detección de color usando otro 123 Robot: los valores de 'rojo', 'verde' y 'azul' que detecta el sensor ocular están alineados con los valores de tono rojo, verde y azul de los 123 Robots. Reemplaza el lobo rojo con un robot 123 rojo y ejecuta el proyecto. Si el proyecto ahora se ejecuta según lo previsto, asegúrese de que el color del Lobo sea el mismo o un tono similar al rojo del Robot 123.
- Pruebe la detección de color utilizando la aplicación Classroom: con el 123 Robot activado, abra la aplicación Classroom, seleccione el robot que está probando y seleccione "Mostrar información del dispositivo". Con la información del dispositivo abierta, el primer sensor que muestra datos es el sensor ocular. El sensor ocular informa el color que el sensor está detectando (rojo, azul, verde o N/A) y el valor de tono que se detecta en grados. Coloque el robot 123 frente al lobo rojo y observe qué valor de color y tono se informa en la aplicación Classroom.
- Si el color informado no es 'rojo', primero reemplace el lobo rojo con un robot 123 rojo y vea si el robot informa rojo. Si lo hace, ajusta el color del lobo rojo para que coincida mejor con el robot rojo y usa las lecturas de la aplicación Classroom para ayudarte en este proceso.
- También puedes intentar ajustar la iluminación ambiental en el aula para ver si eso ayuda a que tus lecturas de color también sean más precisas.
- Consulte el artículo Uso de la aplicación Classroom para solucionar problemas de su robot 123 para obtener más información.
- Consulte el artículo Solución de problemas de VEX 123 Sensors para obtener información y pasos adicionales para la solución de problemas.