
Fundamentos DA invenção
A Little Red Robot Unit usa a história da Chapeuzinho Vermelho como um veículo para introduzir os conceitos de codificação de sequência, seleção e iteração – os blocos de construção de um algoritmo. Os alunos explorarão a sequência no Laboratório 1, codificando seu pequeno robô vermelho para dirigir até a casa da avó usando diferentes sequências de cartões Drive Coder. No Laboratório 2, eles explorarão a seleção, usando o cartão do Codificador “Drive until object” e o Sensor de Olhos para fazer o robô dirigir até que um objeto seja detectado. No Laboratório 3, os alunos desenvolverão seus projetos para adicionar uma condicional usando os cartões do Codificador "Se vermelho", "Caso contrário" e "Encerrar se". Em seguida, eles explorarão a iteração, usando o cartão "Ir para o início" para criar um "Algoritmo de Detecção de Lobo".
O que é um algoritmo?
Os algoritmos permitem codificar seu robô para tomar decisões de forma autônoma em resposta aos dados de seu ambiente. Um algoritmo é um conjunto preciso de instruções que usa sequência, seleção e iteração (ou loops) para permitir que seu robô conclua tarefas mais desafiadoras, mesmo que o ambiente mude.
- Sequência é a ordem em que os comandos são executados, um após o outro. Sempre que os alunos codificam o Robô 123, eles sequenciam as cartas do Codificador na ordem correta para atingir seu objetivo.
- Seleção refere-se ao uso de dados de sensores para tomar uma decisão dentro de um projeto. Isso ocorre quando os alunos codificam o Robô 123 para usar dados do Sensor de Olhos, como fazem nos Laboratórios 2 com o cartão Codificador “Dirigir até o objeto”, e no Laboratório 3 quando codificam o robô para executar diferentes comportamentos com base na cor do objeto detectado.
- Iteração é a repetição de comportamentos num projeto. Os alunos criam um ‘loop’ (ou iteração) nos seus projetos quando adicionam o cartão do Codificador "Ir para o início" para repetir o seu projeto, como fazem no Laboratório 3.
Sequência - Como o sequenciamento é usado nesta Unidade?
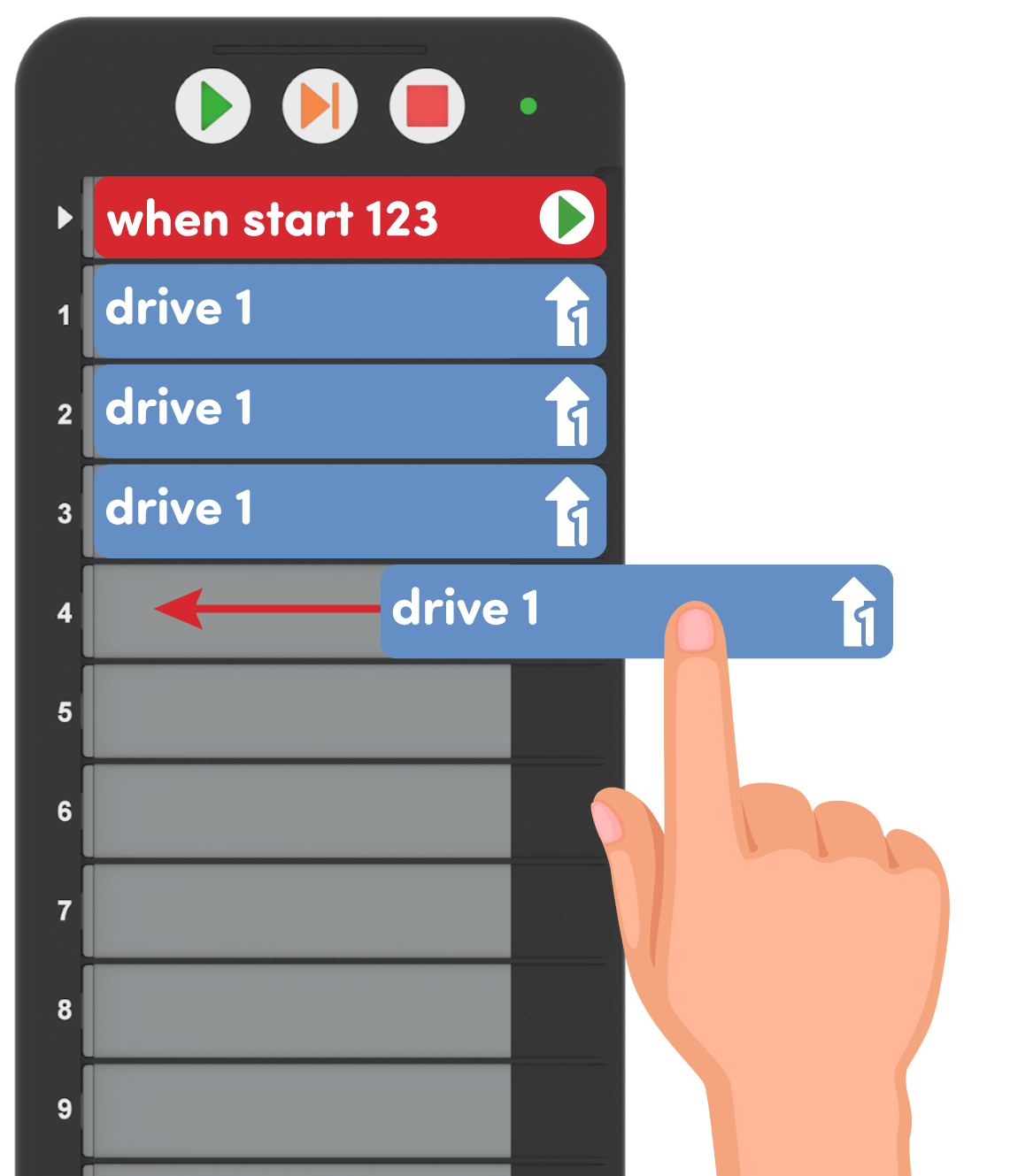
A sequência é a ordem em que as placas codificadoras são executadas em um projeto. As cartas do Codificador são executadas começando com a carta inserida na parte superior do Codificador, depois descendo uma de cada vez.
Nesta animação, você pode ver como o projeto começa com o cartão "Quando iniciar 123" na parte superior do Codificador, então cada cartão do Codificador é executado em ordem de cima para baixo. O Robô 123 avança quatro espaços em um Campo 123. O recurso de realce verde à esquerda do codificador indica qual placa de codificador individual está sendo executada naquele momento. Isso pode fornecer aos alunos um feedback imediato para conectar os comportamentos do Robô 123 com cartões Coder específicos.
Etapas para o planeamento e sequenciação de cartões Coder num projeto
-
Primeiro, identifique o objetivo - o que precisa ser feito? Por exemplo, dirija desde o início até a casa da avó.
- Em seguida, divida as etapas necessárias para atingir a meta e identifique os cartões de Codificador
necessários para realizar essas etapas. Aqui você precisará avançar quatro passos para chegar à casa da
avó. Isso pode ser feito com quatro cartões "Drive 1".
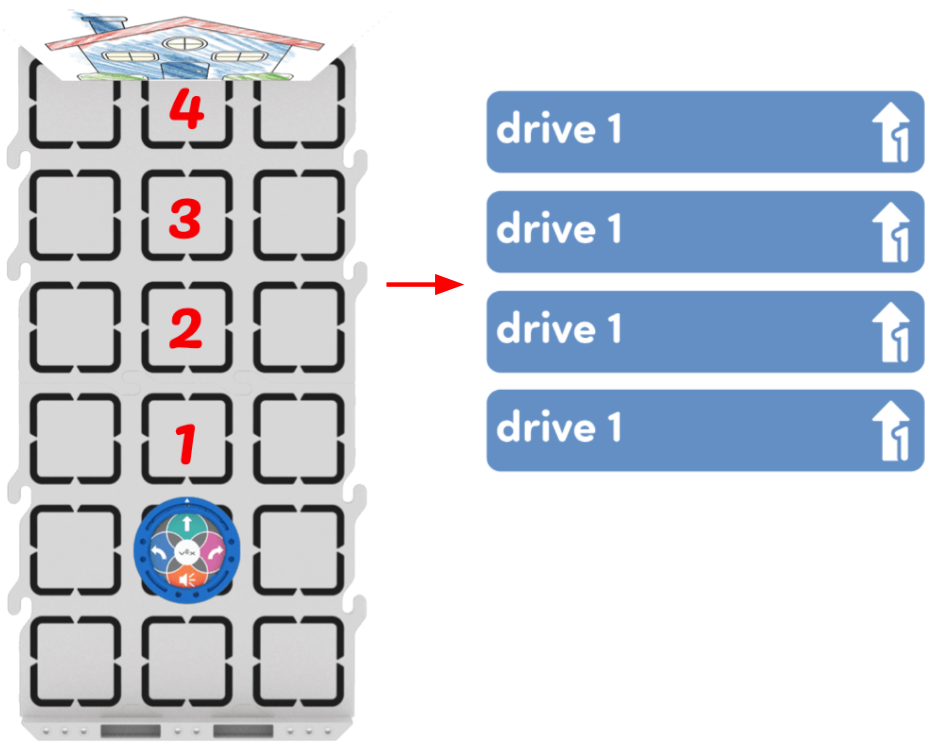
- Em seguida, planeie a sequência do projeto colocando as cartas do Codificador na mesa. Quando estiver
satisfeito com o plano do projeto, insira as placas do Codificador no Codificador começando de cima e
trabalhando para baixo.
- Selecione "Iniciar" para testar o projeto e ver se o robô 123 atinge a meta identificada na primeira
etapa.

Se quiser alterar o seu projeto, basta remover as cartas de Codificador do Codificador, reorganizá-las e inseri-las novamente no Codificador para atualizar o seu projeto.
Seleção - O que é um sensor?
Um sensor é, em essência, um dispositivo que ajuda um robô a entender o mundo ao seu redor. Ele faz isso coletando e relatando dados sobre seu ambiente, que podem ser usados em um projeto para fazer com que o robô tome decisões ou execute determinados comportamentos. Esta sequência pode ser pensada como um loop de decisão do Sense → Think → Act.
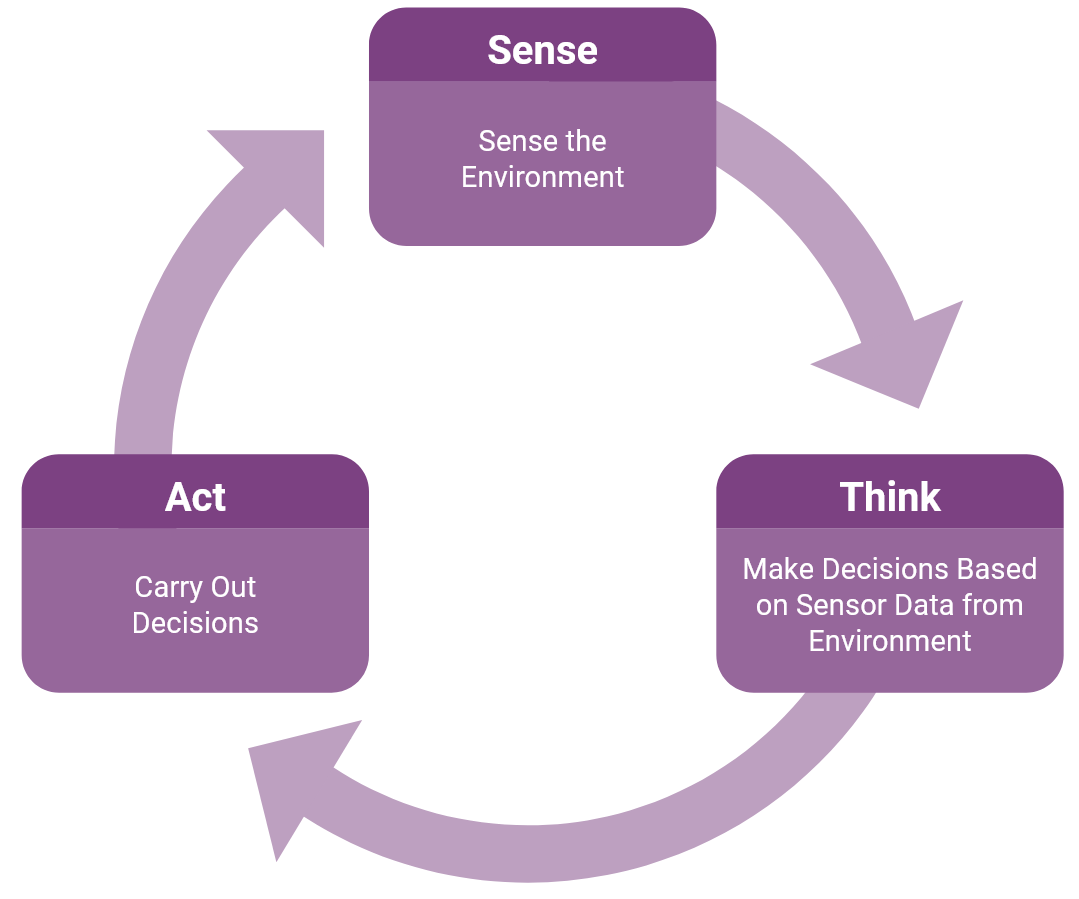
Um robô 123 usa sensores para coletar dados de seu entorno (Sentido), tomar decisões com base nessas informações (Pensar) e transformar essas informações em instruções para comportamentos (Agir).
Nesta Unidade, os alunos codificarão o Robô 123 para detectar o Lobo em seu caminho até a casa da Avó. O projeto que os alunos criam realiza o loop de decisão do Sense → Think → Act, pois o sensor ocular "sentirá" a presença de um objeto (o "Lobo"), então ele "pensará" ou tomará a decisão de parar de dirigir quando o objeto for detectado e, em seguida, o robô 123 agirá e parará de avançar.
O que é o sensor ocular?
O sensor ocular no robô 123 está localizado no lado frontal, abaixo da seta branca. O sensor ocular pode ser usado para detectar a presença ou ausência de um objeto, bem como sua cor ou nível de brilho.

Nesta Unidade, o Sensor de Olhos será usado para detectar quando um objeto (a casa da Avó ou o Lobo) está presente no caminho do Robô 123. A posição do sensor ocular no robô 123 significa que ele só pode detectar objetos diretamente à sua frente. Esteja atento a isso ao colocar seus 123 Robôs e lobos com seus alunos para que os materiais preparem os alunos para o sucesso.

Para obter mais informações sobre como codificar o sensor ocular com o codificador, consulte o artigo Coding the VEX 123 Eye Sensor using the Coder VEX Library.
Como funciona a placa do codificador "Dirija até o objeto"?
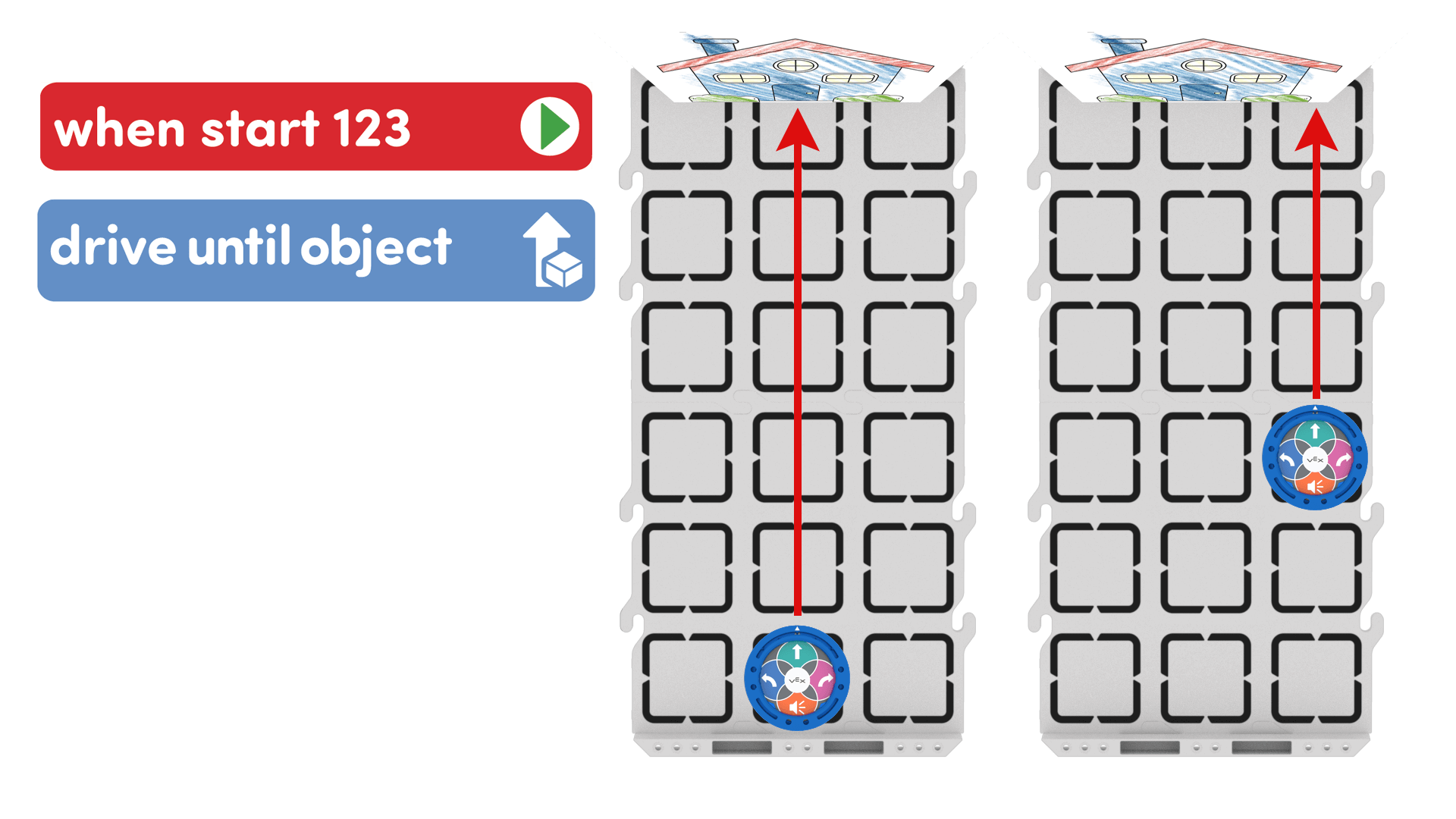
O cartão do Codificador "Dirija até o objeto" usa dados do Sensor de Olho para fazer o 123 Robot Drive avançar até que o Sensor de Olho informe que um objeto foi detectado. Quando um objeto é detectado, o 123 Robot irá parar de conduzir.
![]()
Isto é útil num projeto quando a localização exata de um objeto ou obstáculo é desconhecida ou não pode ser planeada. Nesta Unidade, os alunos usarão primeiro o cartão do Codificador “Dirija até o objeto” para ver se o Robô 123 pode dirigir até a casa da Avó com sucesso com o mesmo projeto, não importa onde ele comece sua jornada.
Como as placas codificadoras "If red", "Else" e "End if" funcionam juntas?
Esses cartões de Codificador podem ser usados para criar um projeto em que o robô usa dados do Sensor de Olho sobre a cor detectada para tomar uma decisão e executar diferentes comportamentos com base na cor detectada.
No Laboratório 3, os alunos usarão a cor do objeto detectado para codificar o robô 123 para assustar o lobo vermelho ou tocar a campainha da casa da avó. Isso é estruturado usando as placas de Codificador "Se vermelho", "Senão" e "Encerrar se". Esses cartões trabalham juntos para formar uma declaração condicional. Uma declaração condicional é usada para executar uma sequência específica de instruções se a condição for atendida (relatório VERDADEIRO) e outro conjunto de instruções se a condição NÃO for atendida (relatório FALSO), "ramificando" assim o fluxo do projeto. Apenas um ramo da instrução condicional será executado quando o projeto for executado, fazendo com que o robô tome uma decisão. No Laboratório 3, a condição que está sendo verificada é a condição de ser vermelha (cartão do Codificador "Se vermelho"). O objeto detectado será relatado como vermelho (VERDADEIRO) ou relatado como não vermelho (FALSO).

A imagem acima mostra o processo de tomada de decisão e como a ramificação funciona com o projeto. O "End if" é usado para terminar a declaração condicional e sinalizar que a tomada de decisão parte do projeto está completa - este é o fim do processo de tomada de decisão if. Quaisquer comandos adicionados após esta carta serão concluídos após a decisão ser tomada.

Esta animação mostra o projeto do Laboratório 3. Veja o destaque no Codificador para ver como o fluxo do projeto se move à medida que a decisão é tomada.
Iteração - Como funciona a placa do Codificador "Ir para iniciar"?
O cartão do Codificador "Ir para iniciar" cria um loop para sempre, fazendo com que o projeto retorne ao cartão do Codificador "Quando iniciar 123" e repita os comportamentos em sequência para sempre, até que o projeto seja interrompido.
Isso é útil em um projeto para fazer com que o robô repita continuamente os mesmos comportamentos ou tome
a mesma decisão repetidas vezes. No Laboratório 3, a placa do Codificador "Ir para iniciar" é colocada
após o objeto ser detectado e a decisão ser tomada. Isso repete essa tomada de decisão repetidamente,
criando o projeto e o algoritmo.
Estratégias para o Ensino com o Codificador nesta Unidade
O Codificador oferece uma oportunidade para alunos e professores se envolverem e compartilharem código de forma fácil e tangível durante as atividades de um Laboratório.
Suporte a leitores pré ou iniciais — Os cartões codificadores são projetados para suportar pré-leitores, ou leitores iniciais, usando ícones para representar as palavras do próprio cartão, para que os alunos possam essencialmente ler as imagens se ainda não conseguirem ler as palavras. Incentive os alunos a usar essas imagens de ícones para ajudá-los enquanto trabalham na construção de seus projetos. Reforce isso referindo-se às imagens nos cartões de Codificador quando você os nomeia com alunos, como "O cartão Quando iniciar 123 Codificador, aquele com a seta verde, sempre vai primeiro."

Verifique e compartilhe o código facilmente — Uma vez que os cartões do Codificador são carregados no Codificador, os alunos podem segurar seu Codificador para mostrar seu código, assim como eles segurariam um quadro branco com uma solução matemática nele. Use essa estratégia durante a instrução em grupo, como um meio de verificar a precisão dos alunos antes de iniciarem seus projetos. Você pode ver de forma rápida e fácil se as placas de Codificador corretas são usadas, se estão inseridas na ordem correta e se certificar de que não estão de cabeça para baixo ou para trás. Ao verificar com grupos para facilitar a atividade independente, procure os cartões Codificadores e Codificador para verificar o progresso.
Quais cartões Coder você precisa?
Os cartões do codificador representam 123 comandos do robô que são inseridos no codificador e usados para codificar o robô 123. Abaixo está uma lista das principais placas de Codificador usadas durante esta Unidade. Consulte a seção Configuração do Ambiente do Resumo em cada Laboratório para obter informações mais detalhadas sobre como organizar e distribuir cartões Coder para seus alunos.
| Cartão do codificador | Comportamento | Exemplo |
|---|---|---|
 |
Inicia o projeto quando o botão ‘Iniciar’ no Codificador é pressionado. | |
 |
123 O robô avançará 1 comprimento do robô. Isso é igual a 1 quadrado no Campo 123. |  |
 |
123 O robô avançará 2 comprimentos de robô. Isso é igual a 2 quadrados no Campo 123. | 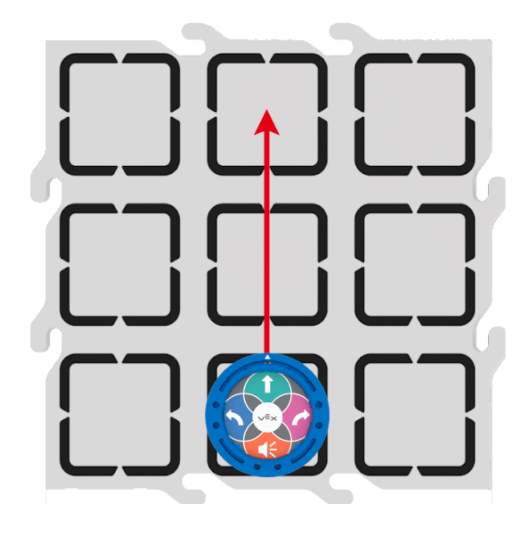 |
 |
123 O robô avançará 4 comprimentos de robô. Isso é igual a 4 quadrados no Campo 123. |  |
 |
123 O robô avançará até que o sensor ocular detecte um objeto. | 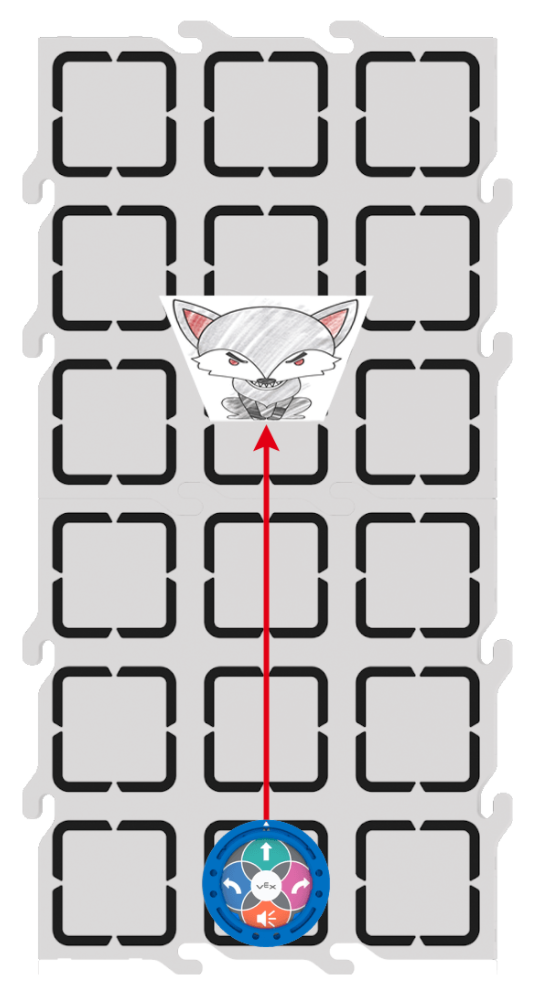 |
 |
Usa o sensor ocular para verificar se a cor vermelha é detectada. | |
 |
Usado em conjunto com um cartão de Codificador 'Se'. A placa do Codificador 'Else' executará as placas do Codificador sob o 'Else' se a condição da placa do Codificador 'If' não for atendida. | |
 |
Termina uma sequência de placas codificadoras 'If' e 'Else' | |
 |
O Codificador retornará ao cartão do Codificador 'Quando iniciar 123' e continuará executando o projeto. |
Ofereça aos alunos cartas de Codificador adicionais das categorias Aparência ou Sons para expandir seus projetos para assustar o Lobo em Jogo Parte 2 do Laboratório 2. Para obter uma lista completa dos cartões Coder e seus comportamentos, consulte o artigo VEX Coder Card Reference Guide VEX Library.
Solução de problemas do sensor ocular no laboratório 3
Se o seu projeto no Laboratório 3 não estiver a funcionar como pretendido, o problema pode estar na forma como o Sensor Ocular está a detetar objetos e as suas cores na sua sala de aula. Antes de solucionar problemas do sensor ocular, pode ser útil entender um pouco sobre como ele funciona quando se trata de detecção de cores.
O sensor ocular detecta um 'valor de matiz' que se alinha a uma cor, não especificamente a uma "cor". Existem muitos tons de vermelho, azul e verde, e cada um tem seu próprio valor de matiz. As cores que são relatadas como detectadas pelo sensor são, na verdade, faixas de valor de matiz que se correlacionam com 'vermelho', 'azul' ou 'verde'. O sensor ocular detecta o valor de matiz do objeto à sua frente e, se esse valor estiver dentro do intervalo alinhado com 'vermelho', 'azul' ou 'verde', a cor será relatada como tal.
Existem várias estratégias de resolução de problemas que também pode tentar fazer com que o projeto funcione como pretendido.
- Ajuste a luz ambiente - O sensor ocular no robô 123 é sensível à luz. Se a luz ambiente na sala estiver escura ou com uma tonalidade amarela, como as luzes fluorescentes, isso pode afetar as leituras de cor do sensor ocular. Tente mover sua configuração para um espaço mais brilhante na sala de aula ou acenda luzes adicionais para ver se isso ajuda o robô a detectar as cores com mais precisão.
- Teste a detecção de cor usando outro robô 123 - Os valores 'vermelho', 'verde' e 'azul' que são detectados pelo sensor ocular estão alinhados com os valores de matiz vermelho, verde e azul dos robôs 123. Substitua o Lobo vermelho por um Robô 123 vermelho e execute o projeto. Se o projeto agora funcionar como pretendido, verifique se a cor do Lobo é a mesma ou uma tonalidade semelhante ao vermelho do Robô 123.
- Teste a deteção de cores utilizando a aplicação Sala de Aula - Com o robô 123
ligado, abra a aplicação Sala de Aula, selecione o robô que está a testar e selecione "Mostrar
informações do dispositivo". Com as informações do dispositivo abertas, o primeiro sensor que mostra
os dados é o sensor ocular. O sensor ocular informa a cor que o sensor está detectando (vermelho, azul,
verde ou N/A) e o valor da tonalidade sendo detectado em graus. Coloque o Robô 123 na frente do Lobo
vermelho e veja que cor e valor de matiz estão sendo relatados no Aplicativo Sala de Aula.
- Se a cor relatada não for 'vermelho', primeiro substitua o Lobo vermelho por um Robô 123 vermelho e veja se o robô relata vermelho. Se isso acontecer, ajuste a cor do Lobo vermelho para combinar melhor com o robô vermelho e use as leituras do Aplicativo Sala de Aula para ajudá-lo nesse processo.
- Você também pode tentar ajustar a iluminação ambiente na sala de aula, para ver se isso ajuda suas leituras de cores a serem mais precisas também.
- Veja o artigo Using the Classroom App to Troubleshoot Your 123 Robot para obter mais informações.
- Consulte o artigo Solução de problemas dos sensores VEX 123 para obter informações e etapas adicionais de solução de problemas.