
Hintergrund
Die Little Red Robot Unit nutzt die Geschichte von Rotkäppchen als Vehikel, um die Codierungskonzepte Sequenz, Auswahl und Iteration – die Bausteine eines Algorithmus - vorzustellen. Die Schüler erkunden die Sequenz in Labor 1, indem sie ihren kleinen roten Roboter codieren, um mit verschiedenen Sequenzen von Drive-Coder-Karten zum Haus der Großmutter zu fahren. In Labor 2 erkunden sie die Auswahl, indem sie die Codierkarte "Fahren bis zum Objekt" und den Augensensor verwenden, um den Roboter so lange fahren zu lassen, bis ein Objekt erkannt wird. In Labor 3 bauen die Schüler auf ihren Projekten auf und fügen eine Bedingung hinzu, indem sie die Codiererkarten „Wenn rot“, „Sonst“ und „Ende wenn“ verwenden. Sie werden dann die Iteration untersuchen, indem sie die Karte "Zum Start" verwenden, um einen "Wolferkennungsalgorithmus" zu erstellen.
Was ist ein Algorithmus?
Algorithmen ermöglichen es Ihnen, Ihren Roboter zu codieren, um autonom Entscheidungen in Reaktion auf Daten aus seiner Umgebung zu treffen. Ein Algorithmus ist ein präziser Satz von Anweisungen, der Sequenz, Auswahl und Iteration (oder Schleifen) verwendet, damit Ihr Roboter anspruchsvollere Aufgaben ausführen kann, auch wenn sich die Umgebung ändert.
- Sequenz ist die Reihenfolge, in der Befehle nacheinander ausgeführt werden. Jedes Mal, wenn Schüler den 123-Roboter codieren, sequenzieren sie Coder-Karten in der richtigen Reihenfolge, um ihr Ziel zu erreichen.
- Auswahl bezieht sich auf die Verwendung von Sensordaten, um eine Entscheidung innerhalb eines Projekts zu treffen. Dies tritt auf, wenn die Schüler den 123-Roboter so programmieren, dass er Daten vom Augensensor verwendet, wie sie es in Labs 2 mit der Codierkarte „Fahren bis zum Objekt“ tun, und in Lab 3, wenn sie den Roboter so programmieren, dass er verschiedene Verhaltensweisen basierend auf der Farbe des erkannten Objekts ausführt.
- Iteration ist die Wiederholung von Verhaltensweisen in einem Projekt. Die Schüler erstellen eine „Schleife“ (oder Iteration) in ihren Projekten, wenn sie die Programmiererkarte „Zum Start“ hinzufügen, um ihr Projekt zu wiederholen, wie sie es in Lab 3 tun.
Sequenz - Wie wird die Sequenzierung in dieser Einheit verwendet?
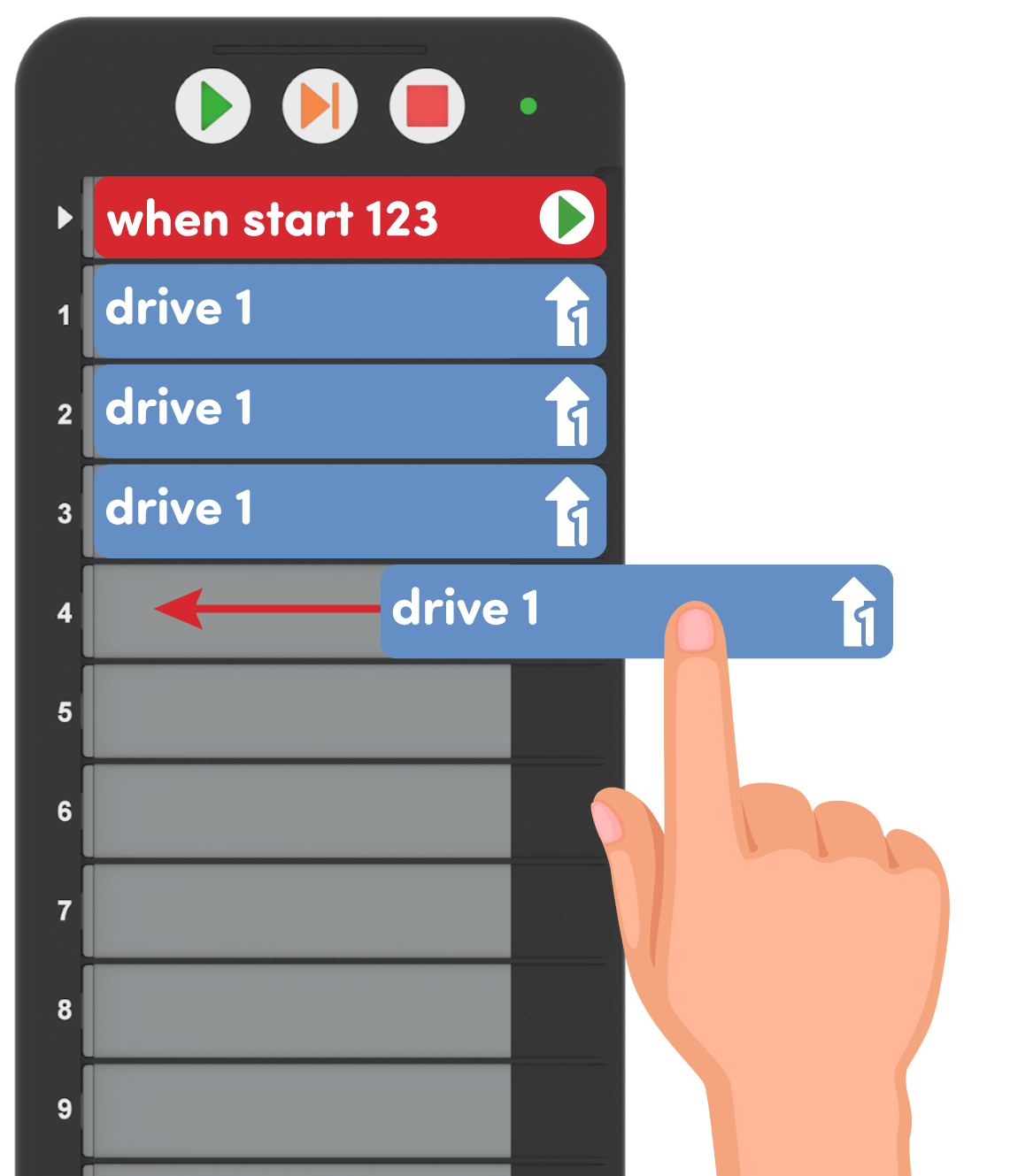
Die Reihenfolge ist die Reihenfolge, in der Coder-Karten in einem Projekt ausgeführt werden. Die Coder-Karten werden beginnend mit der oben in den Coder eingeführten Karte ausgeführt und bewegen sich dann einzeln nach unten.
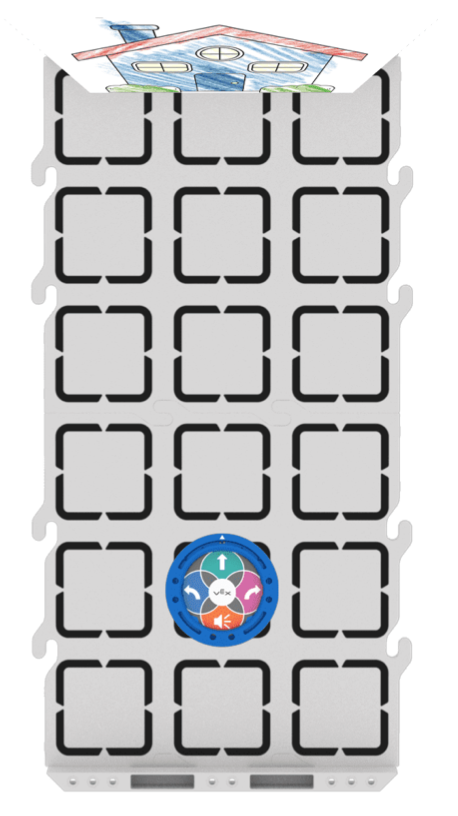
In dieser Animation können Sie sehen, wie das Projekt mit der Karte "When start 123" oben im Coder beginnt, dann wird jede Coder-Karte in der Reihenfolge von oben nach unten ausgeführt. Der 123-Roboter fährt vier Felder auf einem 123-Feld vorwärts. Die grüne Hervorhebungsfunktion auf der linken Seite des Coders zeigt an, welche einzelne Coderkarte gerade läuft. Dies kann den Schülern sofortiges Feedback geben, um das Verhalten des 123 Roboters mit bestimmten Coder-Karten zu verbinden.
Schritte zur Planung und Sequenzierung von Coderkarten in einem Projekt
-
Identifizieren Sie zunächst das Ziel - was muss getan werden? Fahren Sie zum Beispiel von Anfang an zum Haus der Großmutter.
- Unterbrechen Sie dann die Schritte, die zum Erreichen des Ziels erforderlich sind, und identifizieren Sie die Coder-Karten, die zum Erreichen dieser Schritte erforderlich sind. Hier müssen Sie vier Schritte vorwärts gehen, um zum Haus der Großmutter zu gelangen. Dies kann mit vier "Drive 1" -Karten erreicht werden.
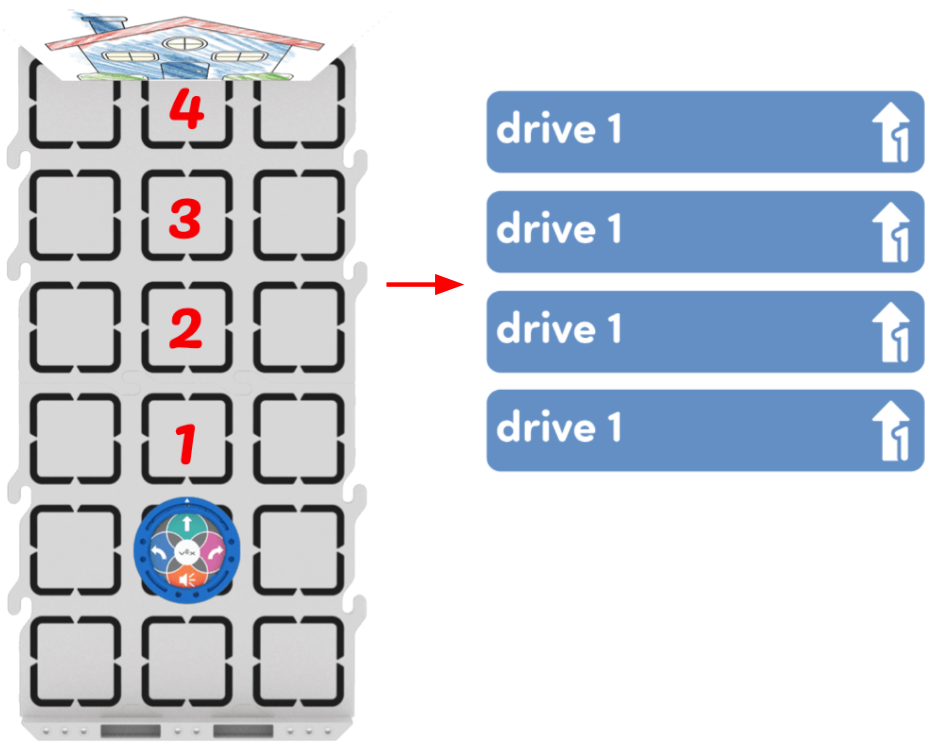
- Als nächstes planen Sie die Reihenfolge des Projekts, indem Sie die Coder-Karten auf den Tisch legen. Sobald Sie mit dem Projektplan zufrieden sind, legen Sie die Coder-Karten von oben nach unten in den Coder ein.
- Wählen Sie "Start", um das Projekt zu testen und zu sehen, ob der 123-Roboter das im ersten Schritt identifizierte Ziel erreicht.

Wenn Sie Ihr Projekt ändern möchten, entfernen Sie einfach die Coder-Karten aus dem Coder, ordnen Sie die Karten neu an und legen Sie sie wieder in den Coder ein, um Ihr Projekt zu aktualisieren.
Auswahl - Was ist ein Sensor?
Ein Sensor ist im Wesentlichen ein Gerät, das einem Roboter hilft, die Welt um ihn herum zu verstehen. Dies geschieht durch das Sammeln und Berichten von Daten über seine Umgebung, die dann in einem Projekt verwendet werden können, um Entscheidungen zu treffen oder bestimmte Verhaltensweisen auszuführen. Diese Sequenz kann als Sense → Think Act-Entscheidungsschleife → betrachtet werden.
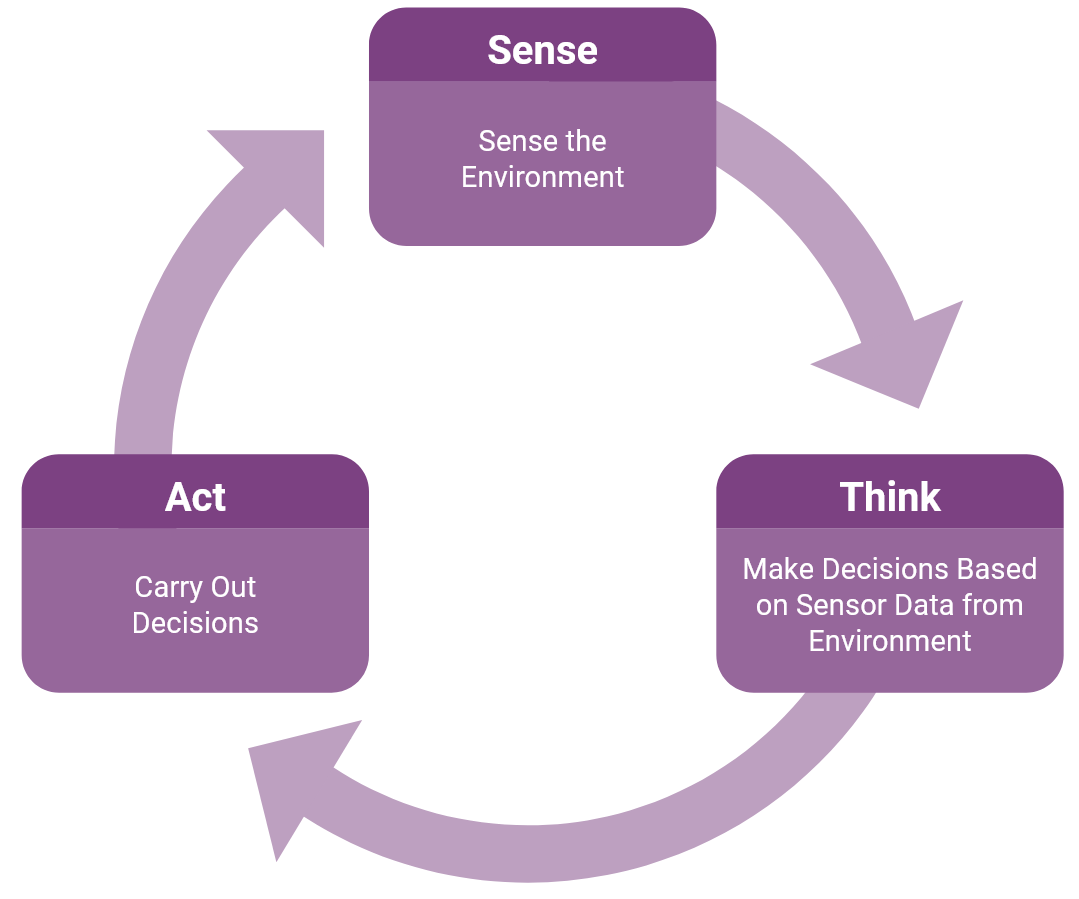
Ein 123-Roboter verwendet Sensoren, um Daten aus seiner Umgebung zu sammeln (Sense), Entscheidungen auf der Grundlage dieser Informationen zu treffen (Think) und diese Informationen in Anweisungen für Verhaltensweisen umzuwandeln (Act).
In dieser Einheit kodieren die Schüler den Roboter 123, um den Wolf auf seinem Weg zum Haus der Großmutter zu erkennen. Das von den Projektstudenten erstellte Projekt führt die Entscheidungsschleife Sense → Think → Act durch, da der Augensensor die Anwesenheit eines Objekts (des „Wolfes“) „erkennt“, dann „denkt“ oder eine Entscheidung trifft, die Fahrt einzustellen , wenn das Objekt erkannt wird, und dann handelt der 123-Roboter und hört auf, sich vorwärts zu bewegen.
Was ist der Augensensor?
Der Augensensor des 123 Roboters befindet sich auf der nach vorne gerichteten Seite unter dem weißen Pfeil. Der Augensensor kann verwendet werden, um die Anwesenheit oder Abwesenheit eines Objekts sowie dessen Farbe oder Helligkeitsstufe zu erkennen.

In dieser Einheit wird der Augensensor verwendet, um zu erkennen, wenn sich ein Objekt (das Haus der Großmutter oder der Wolf) im Weg des Roboters 123 befindet. Die Position des Augensensors am 123 Robot bedeutet, dass er nur Objekte direkt davor erkennen kann. Achten Sie darauf, wenn Sie Ihre 123 Roboter und Wölfe bei Ihren Schülern platzieren, damit die Materialien die Schüler auf den Erfolg vorbereiten.

Weitere Informationen zum Codieren des Augensensors mit dem Coder finden Sie im Artikel Codieren des vex 123 Augensensors mithilfe des Artikels Coder vex Library.
Wie funktioniert die Codiererkarte „Drive until object“?
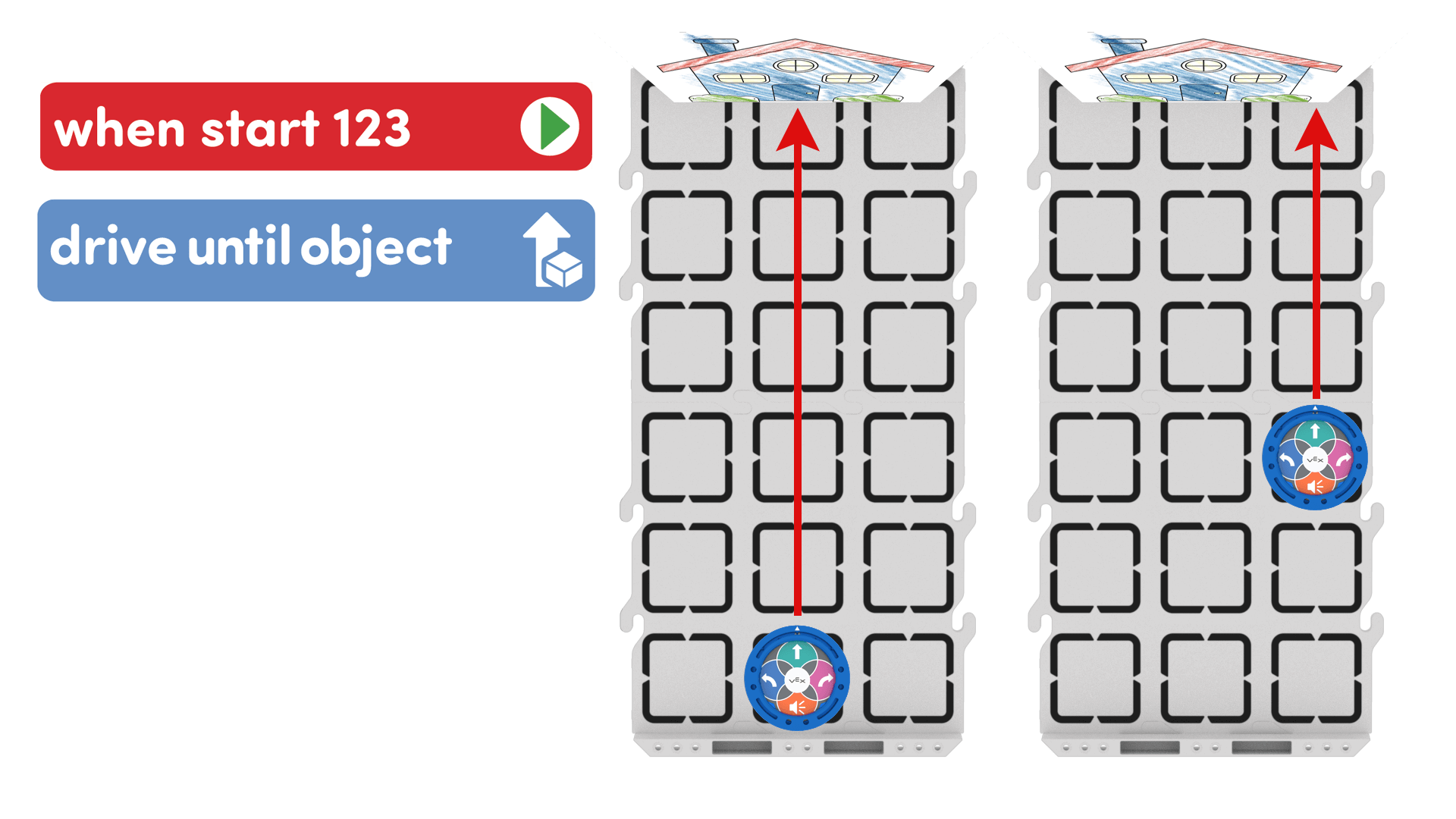
Die Codiererkarte "Fahren bis zum Objekt" verwendet Daten vom Augensensor, um den 123 Roboter vorwärts zu fahren, bis der Augensensor meldet, dass ein Objekt erkannt wurde. Wenn ein Objekt erkannt wird, stoppt der 123 Roboter die Fahrt.
![]()
Dies ist in einem Projekt nützlich, wenn der genaue Standort eines Objekts oder Hindernisses unbekannt ist oder nicht geplant werden kann. In dieser Einheit werden die Schüler zuerst die Programmierkarte "Fahren bis zum Objekt" verwenden, um zu sehen, dass der 123-Roboter mit demselben Projekt erfolgreich zum Haus der Großmutter fahren kann, egal wo er seine Reise beginnt.
Wie funktionieren die Codiererkarten "Wenn rot", "Sonst" und "Ende wenn" zusammen?
Diese Codierkarten können verwendet werden, um ein Projekt zu erstellen, bei dem der Roboter Augensensordaten über die erkannte Farbe verwendet, um eine Entscheidung zu treffen und verschiedene Verhaltensweisen basierend auf der erkannten Farbe durchzuführen.
In Labor 3 verwenden die Schüler die Farbe des erkannten Objekts, um den 123-Roboter zu codieren, um den roten Wolf zu verscheuchen oder an der Tür von Großmutters Haus zu klingeln. Dies wird mit den Codierkarten "Wenn rot", "Sonst" und "Ende wenn" strukturiert. Diese Karten bilden zusammen eine bedingte Anweisung. Eine bedingte Anweisung wird verwendet, um eine bestimmte Sequenz von Anweisungen auszuführen, wenn die Bedingung erfüllt ist (Reporting TRUE), und einen anderen Satz von Anweisungen, wenn die Bedingung NICHT erfüllt ist (Reporting FALSE), wodurch der Projektablauf "verzweigt" wird. Nur ein Zweig der bedingten Anweisung wird ausgeführt, wenn das Projekt ausgeführt wird, wodurch der Roboter eine Entscheidung trifft. In Labor 3 ist die Bedingung, die überprüft wird, die Bedingung, rot zu sein (Codiererkarte "Wenn rot"). Das erkannte Objekt wird entweder als rot (WAHR) oder als nicht rot (FALSCH) gemeldet.

Das Bild oben zeigt den Entscheidungsprozess und wie die Verzweigung mit dem Projekt funktioniert. Das "End if" wird verwendet, um die bedingte Anweisung zu beenden und zu signalisieren, dass die Entscheidungsfindung Teil des Projekts abgeschlossen ist - dies ist das Ende des if-Entscheidungsprozesses. Alle Befehle, die nach dieser Karte hinzugefügt werden, werden nach der Entscheidung abgeschlossen.

Diese Animation zeigt das Projekt aus Lab 3. Sehen Sie sich die Hervorhebung auf dem Coder an, um zu sehen, wie sich der Projektablauf bei der Entscheidung bewegt.
Iteration - Wie funktioniert die "Go to start" Coder-Karte?
Die Codiererkarte "Go to start" erstellt eine Endlosschleife, wodurch das Projekt zur Codiererkarte "When start 123" zurückkehrt und die Verhaltensweisen der Reihe nach für immer wiederholt, bis das Projekt gestoppt wird.
Dies ist in einem Projekt nützlich, um den Roboter dazu zu bringen, ständig die gleichen Verhaltensweisen zu wiederholen oder die gleiche Entscheidung immer und immer wieder zu treffen. In Labor 3 wird die Codiererkarte „Go to start“ platziert, nachdem das Objekt erkannt und die Entscheidung getroffen wurde. Dies wiederholt diese Entscheidungsfindung immer wieder und macht das Projekt und den Algorithmus aus.
Strategien für den Unterricht mit dem Coder in dieser Einheit
Der Coder bietet Schülern und Lehrern die Möglichkeit, sich während der gesamten Aktivitäten eines Labors einfach und greifbar mit Code auseinanderzusetzen und ihn auszutauschen.
Unterstützung von Vorlesern oder frühen Lesern — Programmierkarten sind so konzipiert, dass sie Vorleser oder frühe Leser unterstützen, indem sie Symbole verwenden, um die Wörter der Karte selbst darzustellen, sodass die Schüler die Bilder im Wesentlichen lesen können, wenn sie die Wörter noch nicht lesen können. Ermutigen Sie die Schüler, diese Symbolbilder zu verwenden, um ihnen bei der Erstellung ihrer Projekte zu helfen. Verstärken Sie dies, indem Sie sich auf die Bilder auf den Coder-Karten beziehen, wenn Sie sie mit Schülern benennen, wie z. B. „Die Beim Starten 123 Coder-Karte, die mit dem grünen Pfeil, geht immer zuerst.“

Code einfach prüfen und freigeben — Sobald die Coder-Karten in den Coder geladen sind, können die Schüler ihren Coder hochhalten, um ihren Code anzuzeigen, so wie sie ein Whiteboard mit einer mathematischen Lösung darauf hochhalten würden. Verwenden Sie diese Strategie während des Gruppenunterrichts, um die Genauigkeit der Schüler zu überprüfen, bevor sie mit ihren Projekten beginnen. Sie können schnell und einfach sehen, ob die richtigen Codiererkarten verwendet werden, ob sie in der richtigen Reihenfolge eingelegt sind, und sicherstellen, dass sie nicht auf dem Kopf stehen oder nach hinten zeigen. Wenn Sie sich mit Gruppen einchecken, um die unabhängige Aktivität zu erleichtern, schauen Sie sich die Coder und Coder-Karten an, um den Fortschritt zu überprüfen.
Welche Coderkarten benötigen Sie?
Codierkarten repräsentieren 123 Roboterbefehle, die in den Codierer eingefügt und zum Codieren des 123 Roboters verwendet werden. Nachfolgend finden Sie eine Liste der wichtigsten Coderkarten, die während dieser Einheit verwendet werden. Weitere Informationen zum Organisieren und Verteilen von Coder-Karten an Ihre Schüler finden Sie im Abschnitt Umgebungseinrichtung der Zusammenfassung in jedem Labor.
| Coderkarte | Verhalten | Beispiel |
|---|---|---|
 |
Startet das Projekt, wenn die Schaltfläche "Start" am Coder gedrückt wird. | |
 |
123 Der Roboter fährt 1 Roboterlänge vorwärts. Dies entspricht 1 Feld auf dem 123-Feld. |  |
 |
123 Der Roboter fährt 2 Roboterlängen vorwärts. Dies entspricht 2 Feldern auf dem 123-Feld. | 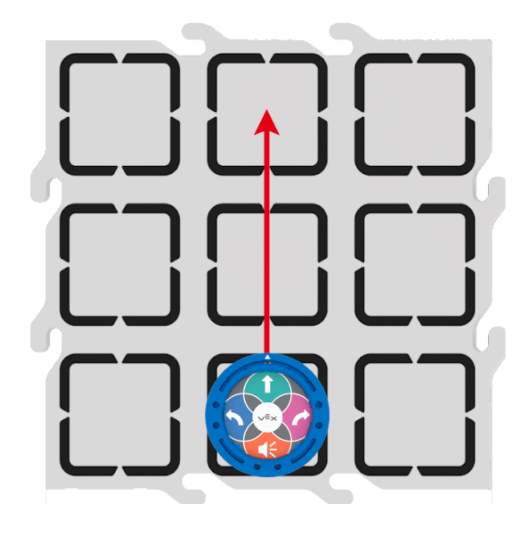 |
 |
123 Der Roboter fährt 4 Roboterlängen vorwärts. Dies entspricht 4 Feldern auf dem 123-Feld. |  |
 |
123 Der Roboter fährt vorwärts, bis der Augensensor ein Objekt erkennt. | 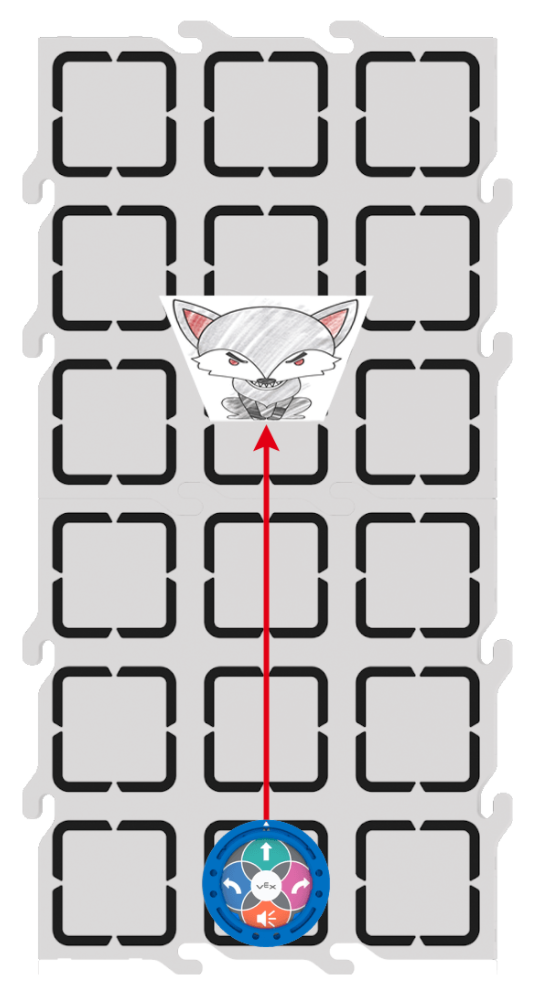 |
 |
Verwendet den Augensensor, um zu überprüfen, ob die Farbe Rot erkannt wird. | |
 |
Wird zusammen mit einer "If" -Codiererkarte verwendet. Die 'Else' -Codiererkarte führt Codiererkarten unter der 'Else' aus, wenn die Bedingung der 'If' -Codiererkarte nicht erfüllt ist. | |
 |
Beendet eine Sequenz von 'If' - und 'Else' -Codiererkarten | |
 |
Der Coder kehrt zur Coderkarte "When start 123" zurück und führt das Projekt weiter aus. |
Bieten Sie den Schülern zusätzliche Programmiererkarten aus den Kategorien Looks oder Sounds an, um ihre Projekte zu erweitern und den Wolf im Spiel, Teil 2 von Labor 2, zu verscheuchen. Eine vollständige Liste der Coder-Karten und ihrer Verhaltensweisen finden Sie im Artikel vex Coder Card Reference Guide vex Library.
Fehlerbehebung des Augensensors im Labor 3
Wenn Ihr Projekt in Labor 3 nicht wie beabsichtigt läuft, liegt das Problem möglicherweise an der Art und Weise, wie der Augensensor Objekte und deren Farben in Ihrem Klassenzimmer erkennt. Vor der Fehlerbehebung des Augensensors kann es hilfreich sein, ein wenig darüber zu verstehen, wie er bei der Farberkennung funktioniert.
Der Augensensor erkennt einen 'Farbtonwert', der sich an einer Farbe ausrichtet, nicht speziell an einer "Farbe". Es gibt viele Schattierungen von Rot, Blau und Grün, und jede hat ihren eigenen Farbtonwert. Die Farben, die als vom Sensor erkannt gemeldet werden, sind tatsächlich Farbtonwertebereiche, die mit "Rot", "Blau" oder "Grün" korrelieren. Der Augensensor erkennt den Farbtonwert des Objekts vor ihm, und wenn dieser Wert in den Bereich fällt, der auf "rot", "blau" oder "grün" ausgerichtet ist, wird die Farbe als solche gemeldet.
Es gibt mehrere Strategien zur Fehlerbehebung, mit denen Sie auch versuchen können, das Projekt wie beabsichtigt zum Laufen zu bringen.
- Stellen Sie das Umgebungslicht ein - Der Augensensor des 123 Roboters ist lichtempfindlich. Wenn das Umgebungslicht im Raum dunkel ist oder einen gelben Farbton erzeugt, wie es bei Leuchtstofflampen der Fall sein könnte, kann dies die Farbwerte des Augensensors beeinflussen. Versuchen Sie, Ihr Setup in einen helleren Raum im Klassenzimmer zu verschieben, oder schalten Sie zusätzliche Lichter ein, um zu sehen, ob dies dem Roboter hilft, die Farben genauer zu erkennen.
- Testen Sie die Farberkennung mit einem anderen 123-Roboter - Die vom Augensensor erfassten Werte für "Rot", "Grün" und "Blau" sind an den Farbtonwerten für Rot, Grün und Blau der 123-Roboter ausgerichtet. Ersetzen Sie den roten Wolf durch einen roten 123-Roboter und führen Sie das Projekt aus. Wenn das Projekt jetzt wie beabsichtigt läuft, stellen Sie sicher, dass die Farbe des Wolfes die gleiche oder eine ähnliche Farbe wie das Rot des 123 Roboters ist.
- Testen Sie die Farberkennung mit der Classroom-App - Öffnen Sie bei eingeschaltetem 123-Roboter die Classroom-App, wählen Sie den Roboter aus, den Sie testen, und wählen Sie „Geräteinformationen anzeigen“. Wenn die Geräte-Info geöffnet ist, ist der erste Sensor, der Daten anzeigt, der Augensensor. Der Augensensor meldet die Farbe, die der Sensor erkennt (Rot, Blau, Grün oder N/A), und den Farbtonwert, der in Grad erkannt wird. Platzieren Sie den 123 Robot vor dem roten Wolf und schauen Sie sich an, welche Farbe und welcher Farbtonwert in der Classroom App gemeldet werden.
- Wenn die gemeldete Farbe nicht "rot" ist, ersetzen Sie zuerst den roten Wolf durch einen roten 123-Roboter und prüfen Sie, ob der Roboter rot meldet. Wenn dies der Fall ist, passen Sie die Farbe des roten Wolfes an, um sie besser an den roten Roboter anzupassen, und verwenden Sie die Classroom App-Lesungen, um Ihnen bei diesem Vorgang zu helfen.
- Sie können auch versuchen, die Umgebungsbeleuchtung im Klassenzimmer anzupassen, um zu sehen, ob dies auch dazu beiträgt, dass Ihre Farbwerte genauer sind.
- Weitere Informationen finden Sie im Artikel Verwenden der Klassenzimmer-App zur Fehlerbehebung für Ihren 123 Robot.
- Weitere Schritte und Informationen zur Fehlerbehebung finden Sie im Artikel Fehlerbehebung vex 123 Sensoren.