
Nền
Đơn vị Robot nhỏ màu đỏ sử dụng câu chuyện về Cô bé quàng khăn đỏ như một phương tiện để giới thiệu các khái niệm mã hóa về trình tự, lựa chọn và lặp lại – các khối xây dựng của một thuật toán. Học sinh sẽ khám phá trình tự trong Phòng thí nghiệm 1, bằng cách mã hóa Robot nhỏ màu đỏ của mình để lái xe đến nhà bà bằng cách sử dụng các trình tự khác nhau của thẻ Drive Coder. Trong Phòng thí nghiệm 2, họ sẽ khám phá lựa chọn, bằng cách sử dụng thẻ Coder “Lái xe cho đến khi đối tượng” và Cảm biến mắt để làm cho robot lái xe cho đến khi phát hiện đối tượng. Trong Phòng thí nghiệm 3, học sinh sẽ xây dựng các dự án của mình để thêm một điều kiện bằng cách sử dụng các thẻ Mã hóa “Nếu đỏ”, “Khác” và “Kết thúc nếu”. Sau đó, họ sẽ khám phá sự lặp lại, sử dụng thẻ “Go to start” để tạo ra một ‘Thuật toán phát hiện sói’.
Thuật toán là gì?
Các thuật toán cho phép bạn mã hóa robot của mình để tự động đưa ra quyết định dựa trên dữ liệu từ môi trường của nó. Thuật toán là một tập hợp chính xác các hướng dẫn sử dụng trình tự, lựa chọn và lặp lại (hoặc vòng lặp) để cho phép robot của bạn hoàn thành các nhiệm vụ khó khăn hơn, ngay cả khi môi trường thay đổi.
- Trình tự là thứ tự mà các lệnh được thực thi, từng lệnh một. Bất cứ khi nào học sinh mã hóa 123 Robot, họ sắp xếp các thẻ Coder theo đúng thứ tự để hoàn thành mục tiêu của mình.
- Lựa chọn đề cập đến việc sử dụng dữ liệu cảm biến để đưa ra quyết định trong một dự án. Điều này xảy ra khi học sinh mã hóa Robot 123 để sử dụng dữ liệu từ Cảm biến Mắt, như họ làm trong Phòng thí nghiệm 2 với thẻ Coder “Drive until object” và trong Phòng thí nghiệm 3 khi họ mã hóa robot để thực hiện các hành vi khác nhau dựa trên màu sắc của đối tượng được phát hiện.
- Lặp lại là sự lặp lại các hành vi trong một dự án. Học sinh tạo ra một ‘vòng lặp’ (hoặc lặp lại) trong các dự án của họ khi họ thêm thẻ Coder “Go to start” để lặp lại dự án của họ, như họ làm trong Lab 3.
Trình tự - Trình tự được sử dụng như thế nào trong Bài học này?
Trình tự là thứ tự mà các thẻ Coder được thực thi trong một dự án. Các thẻ Mã hóa chạy bắt đầu với thẻ được lắp ở đầu Bộ mã hóa, sau đó di chuyển xuống từng thẻ một.
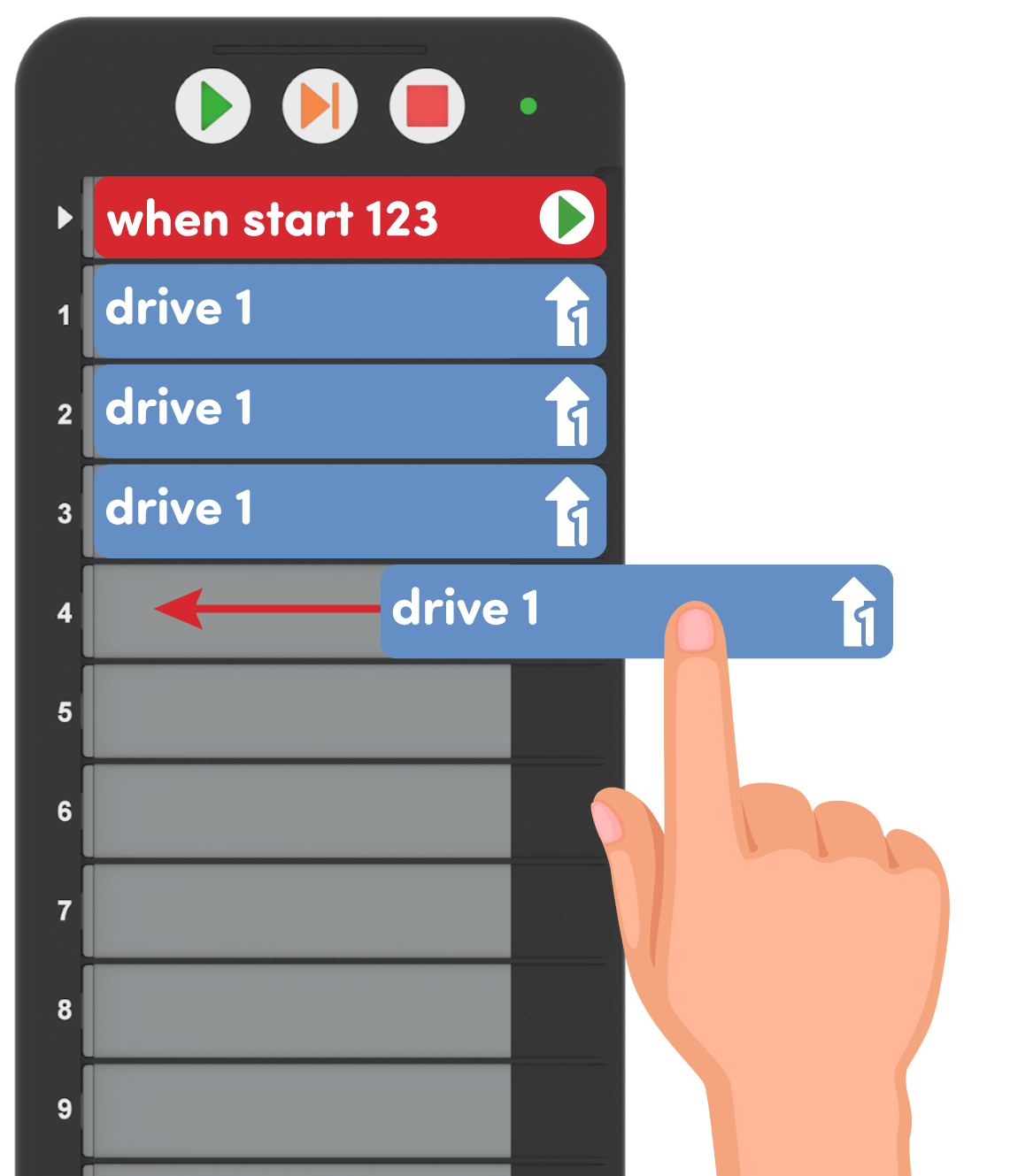
Trong hình ảnh động này, bạn có thể thấy dự án bắt đầu như thế nào với thẻ “Khi bắt đầu 123” ở đầu Bộ mã hóa, sau đó mỗi thẻ Bộ mã hóa được thực thi theo thứ tự từ trên xuống dưới. Robot 123 di chuyển về phía trước bốn khoảng trống trên Sân 123. Tính năng Đánh dấu màu xanh lá cây ở bên trái của Bộ mã hóa cho biết thẻ Bộ mã hóa riêng lẻ nào đang chạy tại thời điểm đó. Điều này có thể cung cấp cho học sinh phản hồi ngay lập tức để kết nối các hành vi của 123 Robot với các thẻ Coder cụ thể.
Các bước lập kế hoạch và sắp xếp các thẻ Coder trong một dự án
-
Đầu tiên, xác định mục tiêu - cần phải làm gì? Ví dụ, lái xe từ đầu đến nhà bà.

- Sau đó, chia nhỏ các bước cần thiết để hoàn thành mục tiêu và xác định các thẻ Coder cần thiết để hoàn thành các bước này. Ở đây bạn sẽ cần phải di chuyển về phía trước bốn bước để đến nhà của bà. Điều này có thể được thực hiện với bốn thẻ "Lái xe 1".
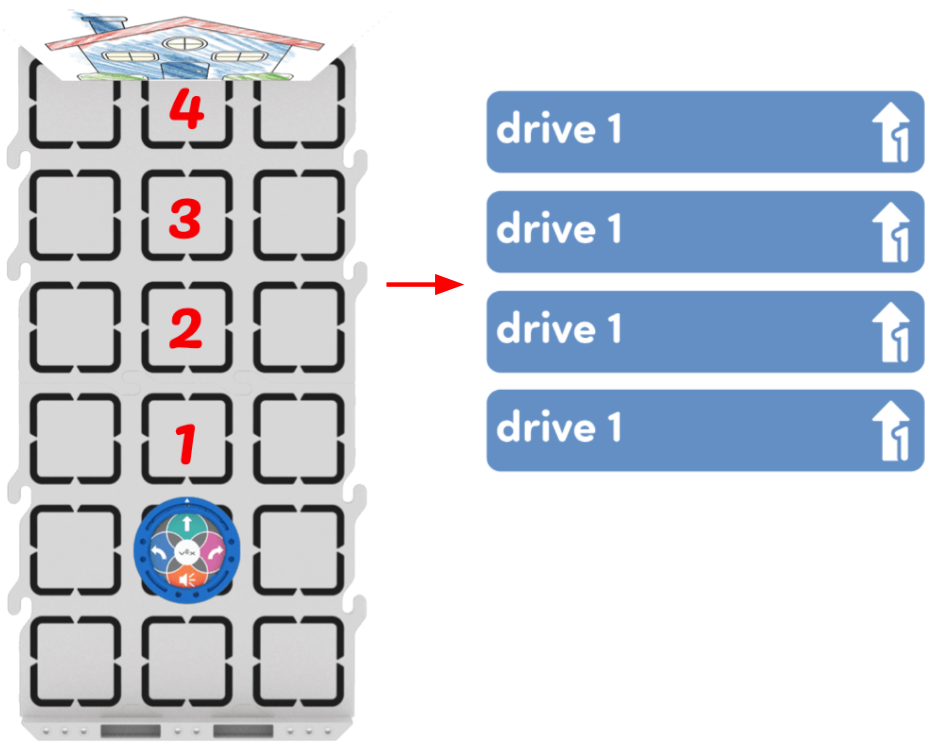
- Tiếp theo, lập kế hoạch trình tự của dự án bằng cách đặt các thẻ Coder lên bàn. Khi bạn đã hài lòng với kế hoạch dự án của họ, hãy lắp các thẻ Coder vào Coder bắt đầu từ trên xuống dưới.
- Chọn “Bắt đầu” để kiểm tra dự án và xem liệu 123 Robot có hoàn thành mục tiêu được xác định trong bước đầu tiên hay không.

Nếu bạn muốn thay đổi dự án của mình, chỉ cần xóa các thẻ Coder khỏi Coder, sắp xếp lại các thẻ và chèn chúng trở lại Coder để cập nhật dự án của bạn.
Lựa chọn - Cảm biến là gì?
Về bản chất, cảm biến là một thiết bị giúp robot hiểu được thế giới xung quanh. Nó thực hiện điều này bằng cách thu thập và báo cáo dữ liệu về môi trường của nó, sau đó có thể được sử dụng trong một dự án để đưa ra quyết định hoặc thực hiện một số hành vi nhất định. Trình tự này có thể được coi là một vòng lặp quyết định của Sense → Think → Act.
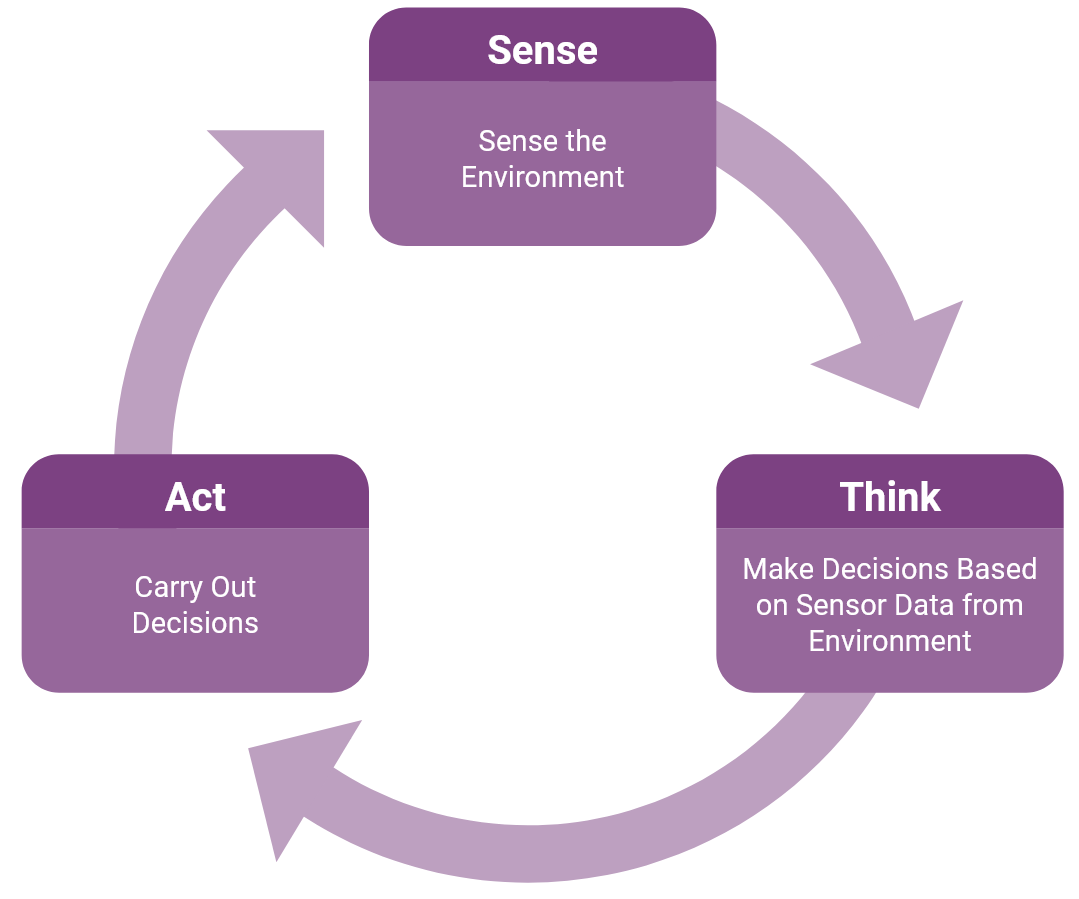
Robot 123 sử dụng các cảm biến để thu thập dữ liệu từ môi trường xung quanh (Sense), đưa ra quyết định dựa trên thông tin này (Think) và biến thông tin đó thành hướng dẫn cho các hành vi (Act).
Trong Bài học này, học sinh sẽ mã hóa 123 Robot để phát hiện Sói trên đường đến nhà của Bà. Các sinh viên dự án tạo ra thực hiện vòng quyết định Sense → Think → Act vì Cảm biến Mắt sẽ "Cảm nhận" sự hiện diện của một vật thể ("Sói"), sau đó nó sẽ "Suy nghĩ" hoặc đưa ra quyết định ngừng lái xe khi phát hiện vật thể, và sau đó Robot 123 sẽ Hành động và ngừng di chuyển về phía trước.
Cảm biến mắt là gì?
Cảm biến mắt trên Robot 123 nằm ở mặt trước, bên dưới mũi tên màu trắng. Cảm biến mắt có thể được sử dụng để phát hiện sự hiện diện hoặc vắng mặt của một vật thể, cũng như màu sắc hoặc mức độ sáng của nó.

Trong Đơn vị này, Cảm biến Mắt sẽ được sử dụng để phát hiện khi một vật thể (nhà của Bà hoặc Sói) có mặt trên đường đi của Robot 123. Vị trí của Cảm biến Mắt trên Robot 123 có nghĩa là nó chỉ có thể phát hiện các vật thể trực tiếp ở phía trước nó. Hãy lưu ý điều này khi bạn đặt 123 Robot và chó sói của mình với học sinh để các tài liệu giúp học sinh thành công.

Để biết thêm thông tin về cách mã hóa Cảm biến mắt với Bộ mã hóa, hãy xem bài viết Mã hóa Cảm biến mắt VEX 123 bằng cách sử dụng Thư viện Coder VEX.
Thẻ Coder “Drive until object” hoạt động như thế nào?
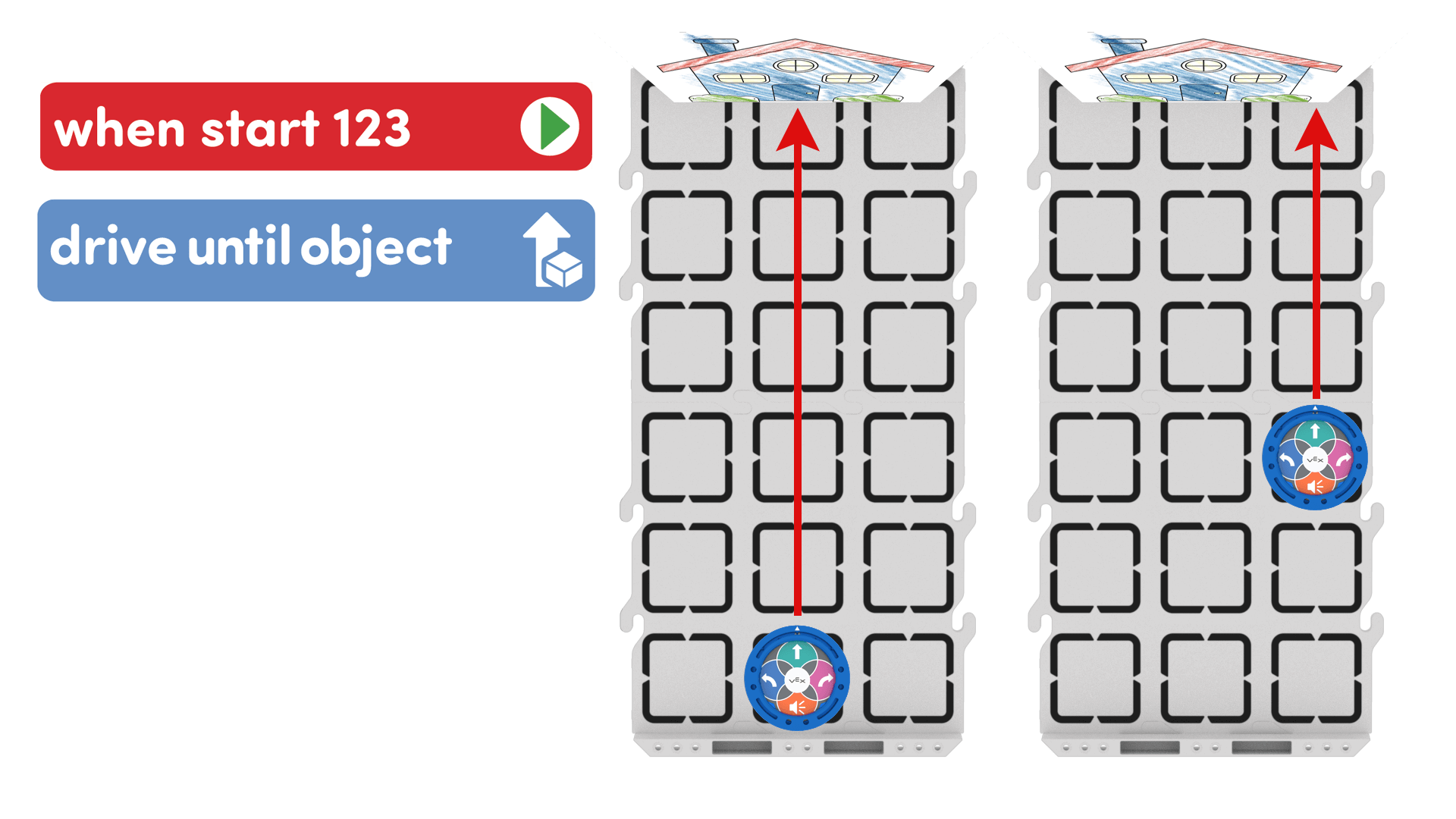
Thẻ Coder “Drive until object” sử dụng dữ liệu từ Cảm biến Mắt để làm cho 123 Robot Drive chuyển tiếp cho đến khi Cảm biến Mắt báo cáo rằng một vật thể được phát hiện. Khi phát hiện vật thể, Robot 123 sẽ ngừng lái xe.
![]()
Điều này rất hữu ích trong một dự án khi vị trí chính xác của một đối tượng hoặc chướng ngại vật không xác định hoặc không thể được lên kế hoạch. Trong Bài học này, trước tiên, học sinh sẽ sử dụng thẻ Coder “Lái xe đến đối tượng” để thấy rằng Robot 123 có thể lái xe đến nhà bà ngoại thành công với cùng một dự án, bất kể nó bắt đầu hành trình từ đâu.
Các thẻ "If red", "Else" và "End if" hoạt động cùng nhau như thế nào?
Các thẻ Coder này có thể được sử dụng để tạo một dự án trong đó robot sử dụng dữ liệu Cảm biến Mắt về màu sắc được phát hiện để đưa ra quyết định và thực hiện các hành vi khác nhau dựa trên màu sắc được phát hiện.
Trong Lab 3, học sinh sẽ sử dụng màu sắc của vật thể được phát hiện để mã hóa Robot 123 để xua đuổi Sói đỏ hoặc rung chuông cửa nhà Bà. Điều này được cấu trúc bằng cách sử dụng các thẻ Mã hóa “Nếu đỏ”, “Khác” và “Kết thúc nếu”. Các thẻ này kết hợp với nhau để tạo thành một câu lệnh có điều kiện. Một câu lệnh có điều kiện được sử dụng để thực hiện một chuỗi các hướng dẫn cụ thể nếu điều kiện được đáp ứng (báo cáo ĐÚNG) và một bộ hướng dẫn khác nếu điều kiện KHÔNG được đáp ứng (báo cáo SAI), do đó ‘phân nhánh’ luồng dự án. Chỉ có một nhánh của câu lệnh điều kiện sẽ được thực thi khi dự án được chạy, khiến robot đưa ra quyết định. Trong Phòng thí nghiệm 3, tình trạng được kiểm tra là tình trạng bị đỏ (thẻ Coder “Nếu đỏ”). Đối tượng được phát hiện sẽ được báo cáo là màu đỏ (ĐÚNG) hoặc được báo cáo là không phải màu đỏ (SAI).
 Luồng
Luồng Hình ảnh trên cho thấy quá trình ra quyết định và cách phân nhánh hoạt động với dự án. "Kết thúc nếu" được sử dụng để kết thúc câu lệnh có điều kiện và báo hiệu rằng phần ra quyết định của dự án đã hoàn thành - đây là kết thúc của quá trình ra quyết định nếu. Bất kỳ lệnh nào được thêm vào sau thẻ này sẽ được hoàn thành sau khi quyết định được đưa ra.

Hình động này cho thấy dự án từ Phòng thí nghiệm 3. Nhìn vào phần tô sáng trên Bộ mã hóa để xem luồng dự án di chuyển như thế nào khi quyết định được đưa ra.
Lặp lại - Thẻ Coder "Bắt đầu" hoạt động như thế nào?
Thẻ Coder “Go to start” tạo ra một vòng lặp mãi mãi, khiến dự án quay trở lại thẻ Coder “When start 123” và lặp lại các hành vi theo trình tự mãi mãi, cho đến khi dự án dừng lại.
Điều này rất hữu ích trong một dự án để khiến robot liên tục lặp lại các hành vi tương tự hoặc đưa ra quyết định tương tự hết lần này đến lần khác. Trong Lab 3, thẻ Coder "Go to start" được đặt sau khi đối tượng được phát hiện và đưa ra quyết định. Điều này lặp đi lặp lại việc ra quyết định nhiều lần, tạo ra dự án và thuật toán.
Chiến lược giảng dạy với Coder trong Đơn vị này
Bộ giải mã tạo cơ hội cho học sinh và giáo viên tham gia và chia sẻ mã dễ dàng và hữu hình trong các hoạt động của Phòng thí nghiệm.
Hỗ trợ người đọc trước hoặc đầu — Thẻ mã hóa được thiết kế để hỗ trợ người đọc trước hoặc người đọc sớm, sử dụng các biểu tượng để thể hiện các từ của chính thẻ, vì vậy học sinh về cơ bản có thể đọc hình ảnh nếu chưa thể đọc các từ. Khuyến khích học viên sử dụng những hình ảnh biểu tượng này để giúp các em khi các em làm việc để xây dựng các dự án của mình. Củng cố điều này bằng cách tham khảo các hình ảnh trên thẻ Mã hóa khi bạn đặt tên cho chúng với học sinh, như "Thẻ Mã hóa Khi bắt đầu 123 , thẻ có mũi tên màu xanh lá cây, luôn đi trước."

Kiểm tra và chia sẻ mã dễ dàng — Khi thẻ Coder được nạp vào Coder, học sinh có thể giơ Coder của mình lên để hiển thị mã của họ, giống như họ sẽ giơ lên một bảng trắng với một giải pháp toán học trên đó. Sử dụng chiến lược này trong quá trình hướng dẫn nhóm, như một phương tiện để kiểm tra tính chính xác của học viên trước khi các em bắt đầu các dự án của mình. Bạn có thể nhanh chóng và dễ dàng xem liệu các thẻ Mã hóa có được sử dụng đúng hay không, nếu chúng được lắp đúng thứ tự và đảm bảo rằng chúng không bị lộn ngược hoặc lộn ngược. Khi đăng ký với các nhóm để tạo điều kiện thuận lợi cho hoạt động độc lập, hãy tìm đến các thẻ Coders và Coder để kiểm tra tiến độ.
Bạn cần những thẻ Coder nào?
Thẻ mã hóa đại diện cho 123 lệnh Robot được chèn vào Bộ mã hóa và được sử dụng để mã hóa 123 Robot. Dưới đây là danh sách các thẻ Coder chính được sử dụng trong Bài học này. Xem phần Thiết lập môi trường của Tóm tắt trong mỗi Phòng thí nghiệm để biết thêm thông tin chi tiết về việc tổ chức và phân phát thẻ Coder cho học sinh của bạn.
| Thẻ mã hóa | Hành vi | Ví dụ |
|---|---|---|
 |
Bắt đầu dự án khi nhấn nút ‘Bắt đầu’ trên Bộ mã hóa. | |
 |
123 Robot sẽ lái xe về phía trước 1 chiều dài robot. Điều này tương đương với 1 ô vuông trên Trường 123. |  |
 |
123 Robot sẽ lái xe về phía trước 2 chiều dài robot. Điều này tương đương với 2 ô vuông trên 123 Field. | 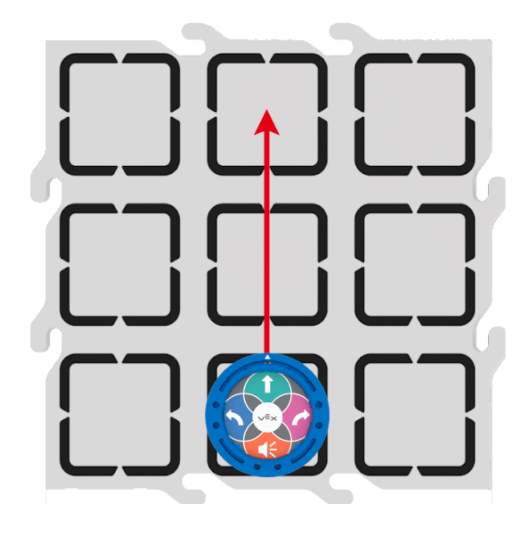 |
 |
123 Robot sẽ lái xe về phía trước 4 chiều dài robot. Điều này tương đương với 4 ô vuông trên 123 Field. |  |
 |
123 Robot sẽ lái xe về phía trước cho đến khi Cảm biến Mắt phát hiện một vật thể. | 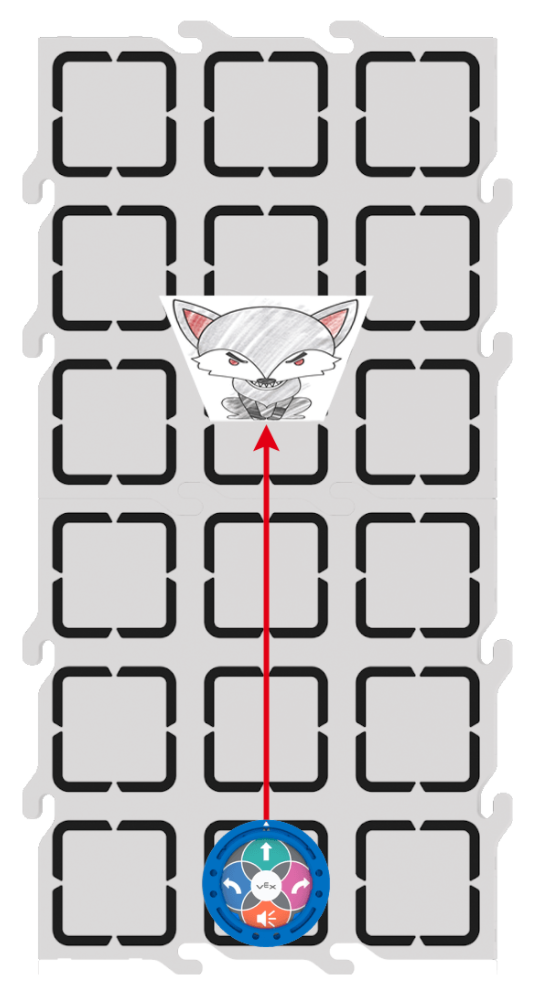 |
 |
Sử dụng Cảm biến Mắt để kiểm tra xem màu đỏ có được phát hiện hay không. | |
 |
Được sử dụng cùng với thẻ Mã hóa 'Nếu'. Thẻ Coder 'Khác' sẽ chạy thẻ Coder dưới thẻ 'Khác' nếu điều kiện của thẻ Coder 'Nếu' không được đáp ứng. | |
 |
Kết thúc một chuỗi các thẻ Coder 'Nếu' và 'Khác' | |
 |
Bộ mã hóa sẽ lặp lại thẻ Bộ mã hóa 'Khi bắt đầu 123' và tiếp tục chạy dự án. |
Cung cấp cho học viên các thẻ Mã hóa bổ sung từ các danh mục Ngoại hình hoặc Âm thanh để mở rộng các dự án của các em nhằm xua đuổi Sói trong Trò chơi Phần 2 của Phòng thí nghiệm 2. Để biết danh sách đầy đủ các thẻ Mã hóa và hành vi của chúng, hãy xem bài viết trong Thư viện VEX Hướng dẫn Tham khảo Thẻ Mã hóa VEX.
Khắc phục sự cố cảm biến mắt trong phòng thí nghiệm 3
Nếu dự án của bạn trong Phòng thí nghiệm 3 không hoạt động như dự định, vấn đề có thể nằm ở cách Cảm biến mắt phát hiện đồ vật và màu sắc của chúng trong lớp học của bạn. Trước khi khắc phục sự cố Cảm biến mắt, bạn nên tìm hiểu một chút về cách thức hoạt động của nó khi phát hiện màu sắc.
Cảm biến mắt phát hiện một 'giá trị màu sắc' phù hợp với một màu sắc, không phải là một "màu sắc" cụ thể. Có nhiều sắc thái của màu đỏ, xanh dương và xanh lá cây, và mỗi sắc thái đều có giá trị màu sắc riêng. Các màu được báo cáo là được phát hiện bởi cảm biến, thực sự là các phạm vi giá trị màu sắc tương quan với 'đỏ', 'xanh dương' hoặc 'xanh lá cây'. Cảm biến mắt phát hiện giá trị màu sắc của vật thể ở phía trước nó và nếu giá trị đó nằm trong phạm vi được căn chỉnh thành 'đỏ', 'xanh dương' hoặc 'xanh lá cây', thì màu đó sẽ được báo cáo như vậy.
Có một số chiến lược khắc phục sự cố mà bạn cũng có thể thử để làm cho dự án hoạt động như dự định.
- Điều chỉnh ánh sáng xung quanh - Cảm biến mắt trên 123 Robot nhạy sáng. Nếu ánh sáng xung quanh trong phòng tối hoặc tạo ra màu vàng, như ánh sáng huỳnh quang, nó có thể ảnh hưởng đến việc đọc màu của Cảm biến mắt. Hãy thử di chuyển thiết lập của bạn đến một không gian sáng hơn trong lớp học hoặc bật đèn bổ sung để xem điều đó có giúp robot phát hiện màu sắc chính xác hơn không.
- Kiểm tra phát hiện màu bằng cách sử dụng 123 Robot khác - Các giá trị 'đỏ', 'xanh lá cây' và 'xanh dương' được phát hiện bởi Cảm biến mắt được căn chỉnh theo các giá trị màu đỏ, xanh lá cây và xanh dương của 123 Robot. Thay thế Sói đỏ bằng Robot 123 màu đỏ và chạy dự án. Nếu dự án hiện đang chạy như dự định, hãy đảm bảo màu sắc của Sói giống nhau, hoặc màu sắc tương tự như màu đỏ của 123 Robot.
- Kiểm tra phát hiện màu bằng Ứng dụng Lớp học - Khi bật Robot 123, mở Ứng dụng Lớp học, chọn robot bạn đang kiểm tra và chọn 'Hiển thị thông tin thiết bị'. Khi Thông tin thiết bị mở, cảm biến đầu tiên hiển thị dữ liệu là Cảm biến mắt. Cảm biến mắt báo cáo màu sắc mà cảm biến đang phát hiện (đỏ, xanh dương, xanh lá cây hoặc N/A) và giá trị màu sắc được phát hiện theo độ. Đặt Robot 123 trước mặt Sói đỏ và xem màu sắc và giá trị màu sắc nào đang được báo cáo trong Ứng dụng Lớp học.
- Nếu màu được báo cáo không phải là 'đỏ', trước tiên hãy thay thế Sói đỏ bằng Robot 123 màu đỏ và xem robot có báo cáo màu đỏ hay không. Nếu có, hãy điều chỉnh màu của Sói đỏ để phù hợp hơn với robot đỏ và sử dụng các bài đọc Ứng dụng lớp học để giúp bạn trong quá trình này.
- Bạn cũng có thể thử điều chỉnh ánh sáng xung quanh trong lớp học, để xem điều đó có giúp việc đọc màu của bạn chính xác hơn không.
- Xem bài viết Sử dụng ứng dụng Lớp học để khắc phục sự cố 123 Robot của bạn để biết thêm thông tin.
- Xem bài viết Xử lý sự cố VEX 123 Cảm biến để biết thêm các bước và thông tin xử lý sự cố.