
ภูมิหลัง
หน่วยหุ่นยนต์สีแดงน้อยใช้เรื่องราวของหนูน้อยหมวกแดงเป็นพาหนะเพื่อแนะนำแนวคิดการเข้ารหัสของลำดับการเลือกและการทำซ้ำซึ่งเป็นส่วนประกอบหลักของอัลกอริทึม นักเรียนจะสำรวจลำดับในห้องปฏิบัติการที่ 1 โดยการเข้ารหัสหุ่นยนต์สีแดงตัวน้อยของพวกเขาเพื่อขับรถไปที่บ้านของคุณยายโดยใช้ลำดับที่แตกต่างกันของบัตร Drive Coder ในห้องปฏิบัติการ 2 พวกเขาจะสำรวจการเลือกโดยใช้การ์ดตัวเข้ารหัส "Drive until object" และเซ็นเซอร์ตรวจจับดวงตาเพื่อให้หุ่นยนต์ขับเคลื่อนจนกว่าจะตรวจพบวัตถุ ในห้องปฏิบัติการ 3 นักเรียนจะสร้างโปรเจกต์เพื่อเพิ่มเงื่อนไขโดยใช้การ์ดรหัส “If red ”,“ Else ”และ“ End if ” จากนั้นพวกเขาจะสำรวจการทำซ้ำโดยใช้การ์ด “ไปที่จุดเริ่มต้น” เพื่อสร้าง ‘อัลกอริทึมการตรวจจับหมาป่า’
อัลกอริทึมคืออะไร?
อัลกอริทึมช่วยให้คุณสามารถเขียนโค้ดหุ่นยนต์ของคุณเพื่อตัดสินใจโดยอัตโนมัติในการตอบสนองต่อข้อมูลจากสภาพแวดล้อม อัลกอริทึมคือชุดคำสั่งที่แม่นยำซึ่งใช้ลำดับการเลือกและการทำซ้ำ (หรือลูป) เพื่อให้หุ่นยนต์ของคุณทำงานที่ท้าทายได้มากขึ้นแม้ว่าสภาพแวดล้อมจะเปลี่ยนไปก็ตาม
- ลำดับ คือลำดับที่คำสั่งถูกดำเนินการทีละคำสั่ง เมื่อใดก็ตามที่นักเรียนเขียนรหัสหุ่นยนต์ 123 พวกเขาจะเรียงลำดับบัตร Coder ตามลำดับที่ถูกต้องเพื่อให้บรรลุเป้าหมาย
- การเลือก หมายถึงการใช้ข้อมูลเซ็นเซอร์ในการตัดสินใจภายในโครงการ สิ่งนี้เกิดขึ้นเมื่อนักเรียนเข้ารหัสหุ่นยนต์ 123 ตัวเพื่อใช้ข้อมูลจากเซ็นเซอร์ตรวจจับดวงตาเช่นเดียวกับที่พวกเขาทำใน Labs 2 ด้วยการ์ดตัวเข้ารหัส "Drive until object" และใน Lab 3 เมื่อพวกเขาเข้ารหัสหุ่นยนต์เพื่อทำพฤติกรรมที่แตกต่างกันตามสีของวัตถุที่ตรวจพบ
- การทำซ้ำ คือการทำซ้ำของพฤติกรรมในโครงการ นักเรียนสร้าง ‘ลูป‘ (หรือการทำซ้ำ) ในโครงการของพวกเขาเมื่อพวกเขาเพิ่มบัตรตัวเข้ารหัส “ไปที่จุดเริ่มต้น” เพื่อทำซ้ำโครงการของพวกเขาเช่นเดียวกับที่พวกเขาทำในห้องปฏิบัติการ 3
ลำดับ - การหาลำดับถูกใช้ในหน่วยนี้อย่างไร?
ลำดับคือลำดับที่บัตร Coder ถูกดำเนินการในโปรเจกต์ การ์ด Coder เริ่มต้นด้วยการ์ดที่ใส่ไว้ที่ด้านบนของ Coder จากนั้นเลื่อนลงทีละใบ
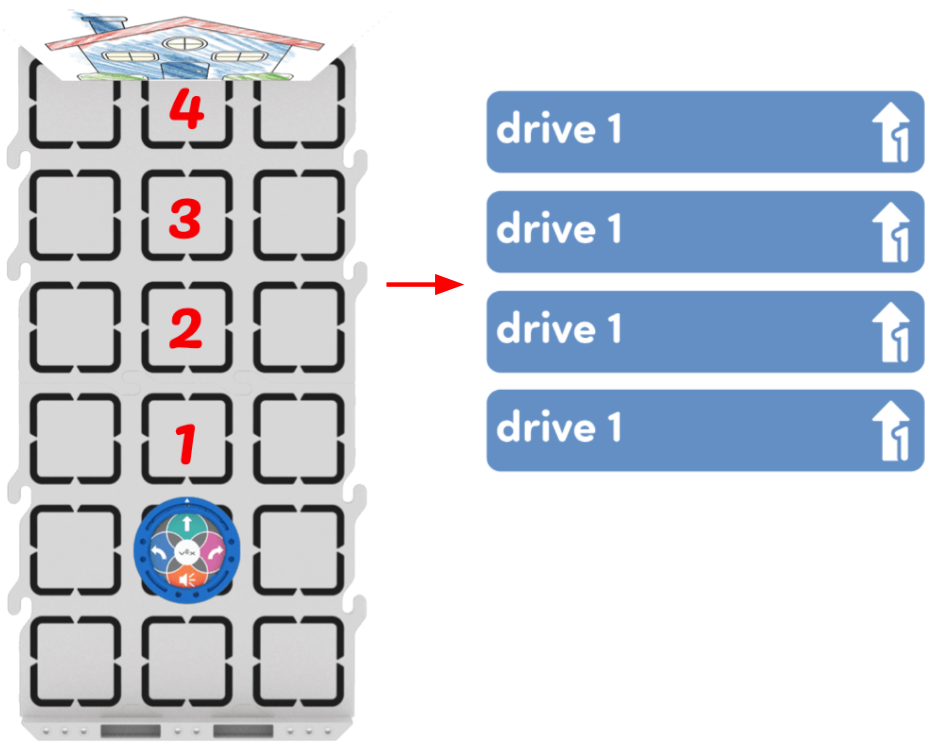
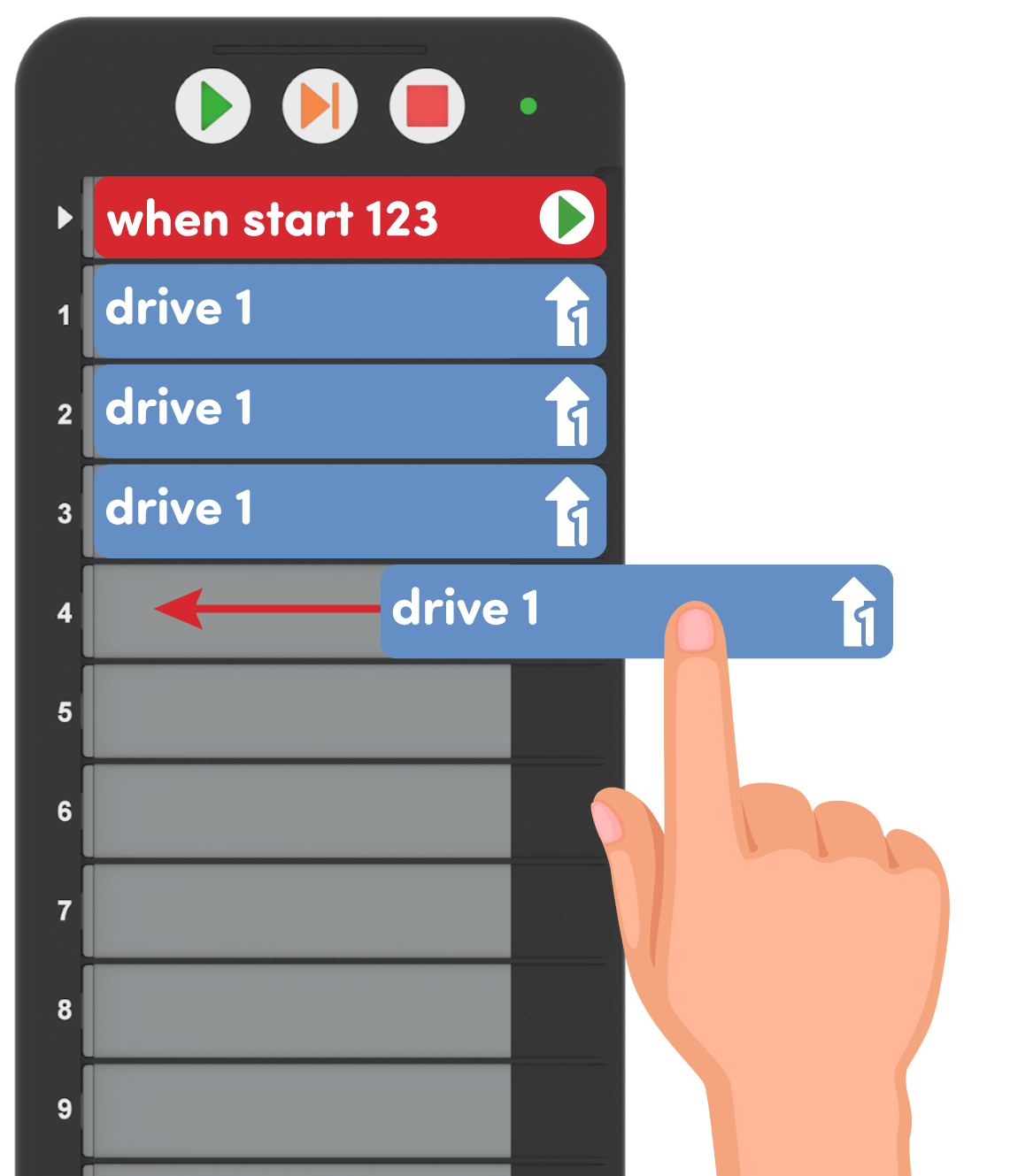
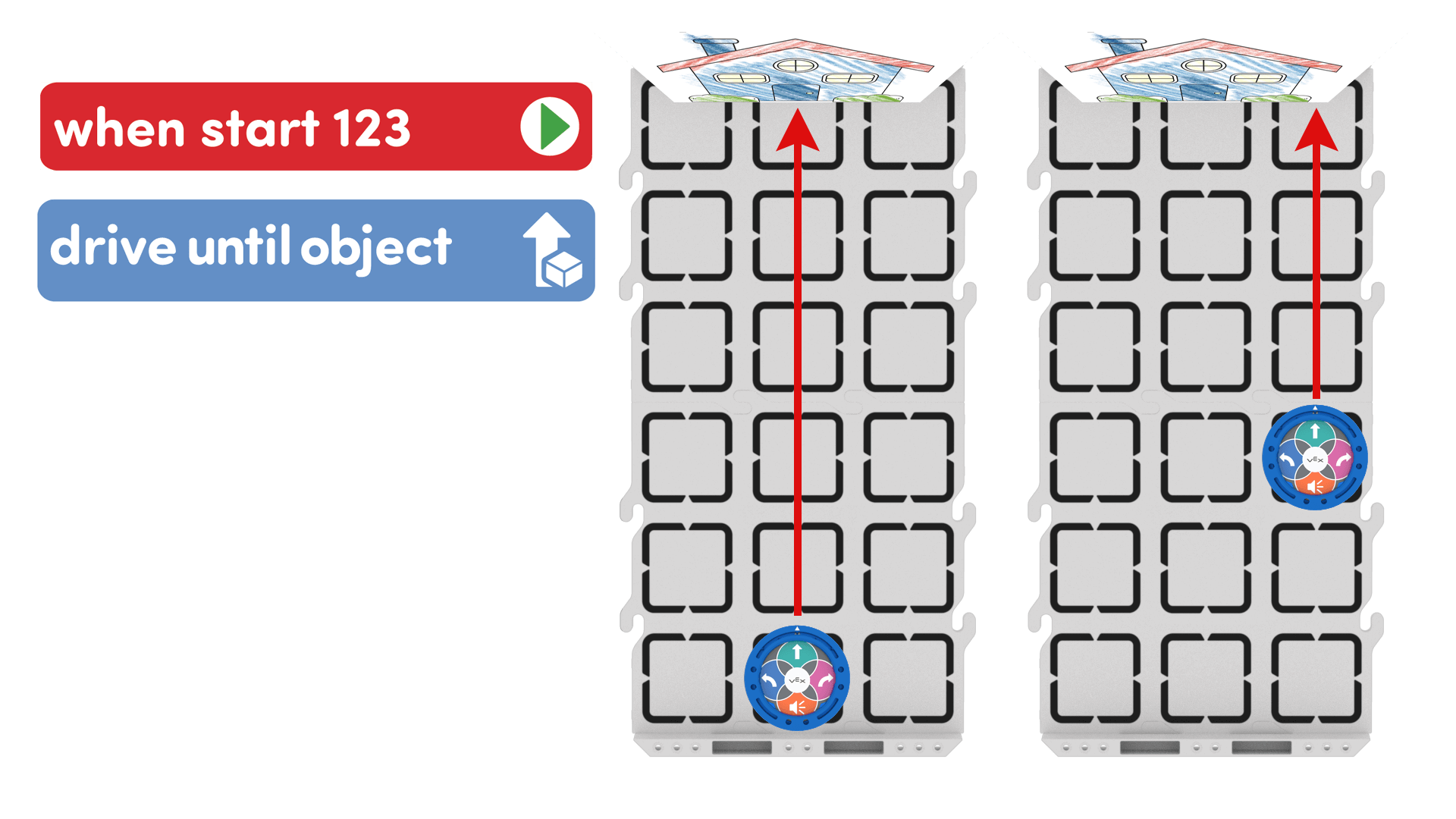
ในแอนิเมชันนี้คุณจะเห็นว่าโปรเจกต์เริ่มต้นด้วยการ์ด “เมื่อเริ่มต้น 123” ที่ด้านบนของตัวเข้ารหัสจากนั้นการ์ดตัวเข้ารหัสแต่ละใบจะถูกดำเนินการตามลำดับจากบนลงล่าง หุ่นยนต์ 123 ขับเคลื่อนไปข้างหน้าสี่ช่องบนสนาม 123 ฟีเจอร์ไฮไลต์สีเขียวที่ด้านซ้ายของ Coder จะระบุว่าบัตร Coder ใดกำลังทำงานอยู่ในขณะนั้น สิ่งนี้สามารถให้ข้อเสนอแนะแก่นักเรียนได้ทันทีเพื่อเชื่อมโยงพฤติกรรมของหุ่นยนต์ 123 กับบัตร Coder เฉพาะ
ขั้นตอนในการวางแผนและจัดลำดับบัตร Coder ในโครงการ
-
ขั้นแรกระบุเป้าหมาย - ต้องทำอะไรบ้าง? ตัวอย่างเช่นขับรถจากจุดเริ่มต้นไปที่บ้านของคุณยาย
- จากนั้นแจกแจงขั้นตอนที่จำเป็นในการบรรลุเป้าหมายและระบุบัตร Coder ที่จำเป็นในการบรรลุขั้นตอนเหล่านี้
ที่นี่คุณจะต้องก้าวไปข้างหน้าสี่ขั้นตอนเพื่อไปที่บ้านของคุณยาย สิ่งนี้สามารถทำได้ด้วยการ์ด “ไดรฟ์ 1”
สี่ใบ
- จากนั้นวางแผนลำดับของโครงการโดยวางการ์ด Coder บนโต๊ะ เมื่อคุณพอใจกับแผนโครงการของพวกเขาแล้วให้ใส่การ์ด
Coder ลงใน Coder เริ่มต้นจากด้านบนและทำงานลง
- เลือก "เริ่ม" เพื่อทดสอบโครงการและดูว่าหุ่นยนต์ 123 ตัวบรรลุเป้าหมายที่ระบุไว้ในขั้นตอนแรกหรือไม่

หากคุณต้องการเปลี่ยนโปรเจกต์ของคุณ เพียงแค่ถอดการ์ด Coder ออกจาก Coder จัดเรียงการ์ดใหม่และใส่กลับเข้าไปใน Coder เพื่ออัปเดตโปรเจกต์ของคุณ
การเลือก - เซ็นเซอร์คืออะไร?
โดยพื้นฐานแล้วเซ็นเซอร์เป็นอุปกรณ์ที่ช่วยให้หุ่นยนต์เข้าใจโลกรอบตัว โดยทำเช่นนี้โดยการรวบรวมและรายงานข้อมูลเกี่ยวกับสภาพแวดล้อมซึ่งสามารถใช้ในโครงการเพื่อตัดสินใจหรือทำพฤติกรรมบางอย่าง ลำดับนี้สามารถคิดได้ว่าเป็นวังวนการตัดสินใจของ Sense → Think → Act
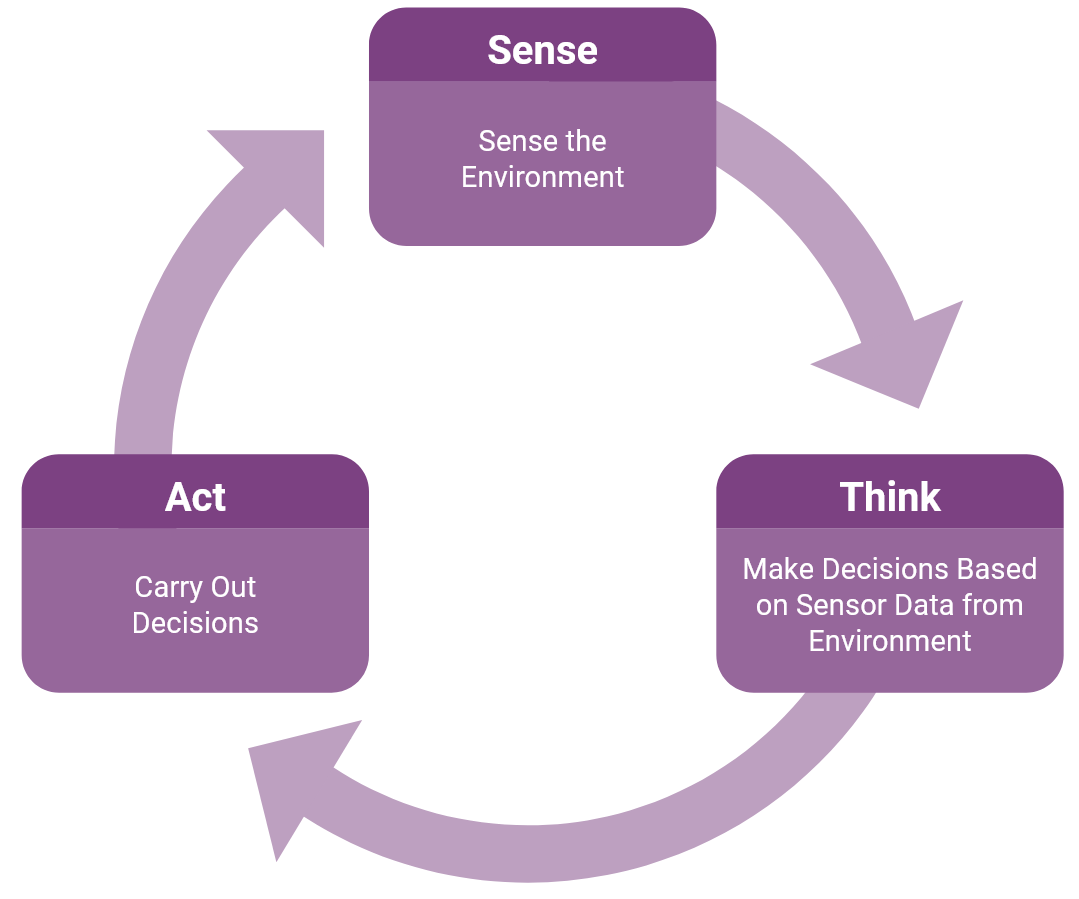
หุ่นยนต์ 123 ใช้เซ็นเซอร์เพื่อรวบรวมข้อมูลจากสภาพแวดล้อม (Sense) ตัดสินใจตามข้อมูลนี้ (Think) และเปลี่ยนข้อมูลนั้นให้เป็นคำแนะนำสำหรับพฤติกรรม (Act)
ในหน่วยนี้นักเรียนจะใส่รหัสหุ่นยนต์ 123 ตัวเพื่อ ตรวจจับหมาป่าในเส้นทางไปยังบ้านของคุณยาย โครงการที่นักเรียนสร้างจะดำเนินการตามวงจรการตัดสินใจ Sense → Think → Act เนื่องจาก Eye Sensor จะ "รับรู้" การปรากฏตัวของวัตถุ (" หมาป่า ") จากนั้นจะ "คิด" หรือ ตัดสินใจที่ จะหยุดขับรถเมื่อตรวจพบวัตถุจากนั้นหุ่นยนต์ 123 จะทำหน้าที่และ หยุดก้าว ไปข้างหน้า
เซ็นเซอร์ตรวจจับดวงตาคืออะไร?
เซ็นเซอร์ตรวจจับดวงตาบนหุ่นยนต์ 123 ตั้งอยู่ที่ด้านหน้าใต้ลูกศรสีขาว เซ็นเซอร์ตรวจจับดวงตาสามารถใช้เพื่อตรวจจับการมีอยู่หรือไม่มีอยู่ของวัตถุเช่นเดียวกับสีหรือระดับความสว่าง

ในหน่วยนี้เซ็นเซอร์ตาจะถูกใช้เพื่อตรวจจับเมื่อมีวัตถุ (บ้านของคุณยายหรือหมาป่า) อยู่ในเส้นทางของหุ่นยนต์ 123 ตำแหน่งของเซ็นเซอร์ตรวจจับดวงตาบนหุ่นยนต์ 123 หมายความว่ามันสามารถตรวจจับวัตถุที่อยู่ด้านหน้าได้โดยตรงเท่านั้น โปรดคำนึงถึงสิ่งนี้เมื่อคุณวางหุ่นยนต์และหมาป่า 123 ตัวไว้กับนักเรียนของคุณเพื่อให้สื่อการเรียนการสอนสร้างความสำเร็จให้กับนักเรียน

สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการเขียนโค้ดเซนเซอร์ตรวจจับดวงตาด้วย Coder โปรดดูที่ การเขียนโค้ดเซนเซอร์ตรวจจับดวงตา vex 123 โดยใช้บทความ Coder vexLibrary
บัตรตัวเข้ารหัส “Drive until object” ทำงานอย่างไร
การ์ดโค๊ดเดอร์ “Drive until object” ใช้ข้อมูลจากเซนเซอร์ตรวจจับดวงตาเพื่อทำให้หุ่นยนต์ 123 ขับไปข้างหน้า จนกว่า เซนเซอร์ตรวจจับดวงตาจะรายงานว่าตรวจพบวัตถุ เมื่อตรวจพบวัตถุหุ่นยนต์ 123 ตัวจะหยุดการขับขี่
![]()
สิ่งนี้มีประโยชน์ในโครงการเมื่อไม่ทราบตำแหน่งที่แน่นอนของวัตถุหรือสิ่งกีดขวางหรือไม่สามารถวางแผนได้ ในหน่วยนี้นักเรียนจะใช้บัตรตัวแปลงรหัส “Drive until object” ก่อนเพื่อดูว่าหุ่นยนต์ 123 ตัวสามารถขับไปที่บ้านของคุณยายได้สำเร็จด้วยโครงการเดียวกันไม่ว่าจะเริ่มต้นการเดินทางจากที่ใด
บัตร Coder "If red "," Else "และ" End if "ทำงานร่วมกันได้อย่างไร?
การ์ด Coder เหล่านี้สามารถใช้เพื่อสร้างโครงการที่หุ่นยนต์ใช้ข้อมูลเซ็นเซอร์ตาเกี่ยวกับสีที่ตรวจพบเพื่อตัดสินใจและทำพฤติกรรมที่แตกต่างกันตามสีที่ตรวจพบ
ในห้องปฏิบัติการที่ 3 นักเรียนจะใช้สีของวัตถุที่ตรวจพบเพื่อเข้ารหัสหุ่นยนต์ 123 ตัวเพื่อทำให้หมาป่าสีแดงตกใจหรือกดกริ่งประตูบ้านของคุณยาย สิ่งนี้มีโครงสร้างโดยใช้บัตร Coder "If red "," Else "และ" End if " การ์ดเหล่านี้ทำงานร่วมกันเพื่อสร้างข้อความที่มีเงื่อนไข คำสั่งแบบมีเงื่อนไขจะใช้เพื่อดำเนินการตามลำดับคำสั่งเฉพาะหากตรงตามเงื่อนไข (การรายงานเป็นจริง) และชุดคำสั่งอื่นหากไม่ตรงตามเงื่อนไข (การรายงานเป็นเท็จ) ซึ่งจะเป็นการ ‘แตกแขนง’ ลำดับขั้นตอนของโครงการ จะมีการดำเนินการตามเงื่อนไขเพียงสาขาเดียวเมื่อโครงการดำเนินการทำให้หุ่นยนต์ตัดสินใจ ในห้องปฏิบัติการ 3 เงื่อนไขที่กำลังตรวจสอบคือเงื่อนไขของการเป็นสีแดง (“ ถ้าเป็นสีแดง ”บัตรโคเดอร์) วัตถุที่ตรวจพบจะถูกรายงานเป็นสีแดง (จริง) หรือรายงานว่าไม่ใช่สีแดง (เท็จ)

ภาพด้านบนแสดงขั้นตอนการตัดสินใจและวิธีการแยกสาขากับโครงการ "สิ้นสุดหาก" ใช้เพื่อสิ้นสุดคำแถลงเงื่อนไขและส่งสัญญาณว่าการตัดสินใจเป็นส่วนหนึ่งของโครงการเสร็จสมบูรณ์ - นี่คือจุดสิ้นสุดของกระบวนการตัดสินใจหาก คำสั่งใดๆที่เพิ่มเข้ามาหลังจากการ์ดใบนี้จะเสร็จสมบูรณ์หลังจากการตัดสินใจเสร็จสิ้น

ภาพเคลื่อนไหวนี้แสดงโครงการจากห้องปฏิบัติการ 3 ดูไฮไลต์บน Coder เพื่อดูว่าโปรเจกต์โฟลว์เคลื่อนที่อย่างไรเมื่อมีการตัดสินใจ
การทำซ้ำ - บัตร Coder "ไปที่จุดเริ่มต้น" ทำงานอย่างไร
การ์ดรหัส "ไปที่จุดเริ่มต้น" จะสร้างลูปตลอดไปทำให้โครงการกลับไปที่การ์ดรหัส "เมื่อเริ่มต้น 123" และทำซ้ำพฤติกรรมตามลำดับตลอดไปจนกว่าโครงการจะหยุดลง
สิ่งนี้มีประโยชน์ในโครงการที่จะทำให้หุ่นยนต์ทำซ้ำพฤติกรรมเดิมอย่างต่อเนื่องหรือตัดสินใจแบบเดิมซ้ำแล้วซ้ำอีก
ในห้องปฏิบัติการ 3 บัตร "ไปที่จุดเริ่มต้น" จะถูกวางไว้หลังจากตรวจพบวัตถุและมีการตัดสินใจ
นี่เป็นการทำซ้ำการตัดสินใจครั้งแล้วครั้งเล่าทำให้โครงการและอัลกอริทึม
กลยุทธ์สำหรับการสอนด้วย Coder ในหน่วยนี้
Coder เปิดโอกาสให้นักเรียนและครูมีส่วนร่วมและแบ่งปันรหัสได้อย่างง่ายดายและเป็นรูปธรรมตลอดกิจกรรมของห้องปฏิบัติการ
การสนับสนุนผู้อ่านก่อนหรือก่อนหน้า — การ์ด Coder ได้รับการออกแบบมาเพื่อสนับสนุนผู้อ่านก่อนหน้าหรือผู้อ่านก่อนหน้าโดยใช้ไอคอนเพื่อแสดงคำพูดของการ์ดเพื่อให้นักเรียนสามารถอ่านภาพได้หากยังไม่สามารถอ่านคำพูดได้ กระตุ้นให้นักเรียนใช้ภาพไอคอนเหล่านี้เพื่อช่วยพวกเขาขณะทำงานเพื่อสร้างโปรเจกต์ เสริมสิ่งนี้ด้วยการอ้างถึงภาพบนบัตร Coder เมื่อคุณตั้งชื่อให้กับนักเรียนเช่น “บัตร Coder เมื่อเริ่มต้น 123 ซึ่งเป็นบัตร ที่มีลูกศรสีเขียวจะไปก่อนเสมอ”

ตรวจสอบและแชร์รหัสได้อย่างง่ายดาย — เมื่อบัตร Coder ถูกโหลดลงใน Coder แล้วนักเรียนสามารถถือ Coder ของพวกเขาเพื่อแสดงรหัสของพวกเขาได้เช่นเดียวกับที่พวกเขาถือกระดานไวท์บอร์ดที่มีคำตอบทางคณิตศาสตร์อยู่ ใช้กลยุทธ์นี้ในระหว่างการสอนเป็นกลุ่มเพื่อตรวจสอบความถูกต้องของนักเรียนก่อนเริ่มโครงการ คุณสามารถดูได้อย่างรวดเร็วและง่ายดายว่ามีการใช้บัตร Coder ที่ถูกต้องหรือไม่มีการสอดเข้าไปในลำดับที่ถูกต้องหรือไม่และตรวจสอบให้แน่ใจว่าไม่มีการกลับหัวหรือถอยหลัง เมื่อเช็คอินกับกลุ่มเพื่ออำนวยความสะดวกในกิจกรรมอิสระให้ดูที่บัตร Coders และ Coder เพื่อตรวจสอบความคืบหน้า
หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับการใช้ Coder เป็นเครื่องมือการสอนโปรดดูบทความนี้ในไลบรารี vex
คุณต้องการบัตร Coder อะไรบ้าง?
การ์ด Coder แสดงถึงคำสั่งหุ่นยนต์ 123 ตัวที่ถูกแทรกลงใน Coder และใช้ในการเข้ารหัสหุ่นยนต์ 123 ตัว ด้านล่างนี้เป็นรายการการ์ดหลักของ Coder ที่ใช้ในระหว่างหน่วยนี้ ดูส่วนการตั้งค่าสภาพแวดล้อมของบทสรุปในแต่ละห้องปฏิบัติการสำหรับข้อมูลเพิ่มเติมเกี่ยวกับการจัดระเบียบและการแจกจ่ายบัตร Coder ให้กับนักเรียนของคุณ
| บัตร Coder | พฤติกรรม | ตัวอย่าง |
|---|---|---|
 |
เริ่มโปรเจกต์เมื่อกดปุ่ม ‘เริ่ม’ บน Coder | |
 |
123 หุ่นยนต์จะขับเคลื่อนไปข้างหน้า 1 ความยาวของหุ่นยนต์ นี่เท่ากับ 1 กำลังสองบนฟิลด์ 123 |  |
 |
123 หุ่นยนต์จะขับเคลื่อนไปข้างหน้า 2 ความยาวของหุ่นยนต์ นี่เท่ากับ 2 สี่เหลี่ยมจัตุรัสในฟิลด์ 123 | 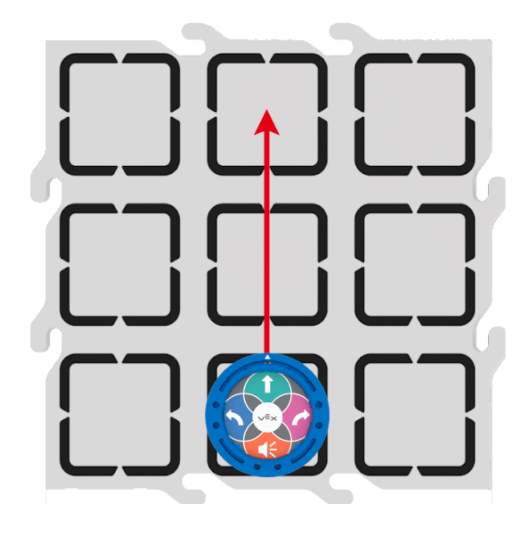 |
 |
123 หุ่นยนต์จะขับเคลื่อนไปข้างหน้า 4 ความยาวของหุ่นยนต์ นี่เท่ากับ 4 สี่เหลี่ยมจัตุรัสในฟิลด์ 123 |  |
 |
123 หุ่นยนต์จะขับไปข้างหน้าจนกว่าเซ็นเซอร์ตรวจจับดวงตาจะตรวจพบวัตถุ | 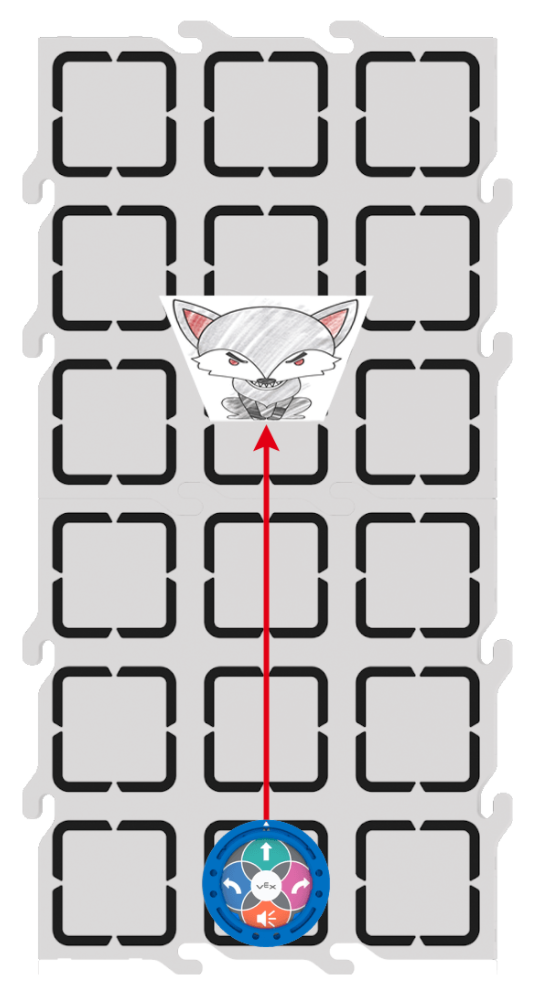 |
 |
ใช้เซ็นเซอร์ตรวจจับดวงตาเพื่อตรวจสอบว่าตรวจพบสีแดงหรือไม่ | |
 |
ใช้ร่วมกับการ์ดรหัส 'If' บัตร Coder 'Else' จะเรียกใช้บัตร Coder ภายใต้ 'Else' หากไม่ตรงตามเงื่อนไขของบัตร Coder 'If' | |
 |
สิ้นสุดลำดับของการ์ดรหัส 'If' และ 'Else' | |
 |
Coder จะวนกลับไปที่บัตร Coder 'When start 123' และดำเนินโครงการต่อไป |
เสนอการ์ดโคเดอร์เพิ่มเติมจากหมวดหมู่ Look or Sounds ให้นักเรียนเพื่อขยายโปรเจกต์ของพวกเขาเพื่อทำให้หมาป่ากลัวใน Play Part 2 ของ Lab 2 สำหรับรายการบัตร Coder ทั้งหมดและพฤติกรรมของพวกเขาโปรดดูที่บทความ ในไลบรารี vex คู่มืออ้างอิงบัตร Codervex
การแก้ไขปัญหาเซ็นเซอร์ตรวจจับดวงตาในห้องปฏิบัติการ 3
หากโครงการของคุณในห้องปฏิบัติการ 3 ไม่ทำงานตามที่ตั้งใจไว้ปัญหาอาจอยู่ที่วิธีที่เซ็นเซอร์ตรวจจับดวงตากำลังตรวจจับวัตถุและสีในห้องเรียนของคุณ ก่อนที่จะแก้ไขปัญหาเซ็นเซอร์ตรวจจับดวงตาอาจเป็นประโยชน์ที่จะเข้าใจเล็กน้อยเกี่ยวกับวิธีการทำงานของมันเมื่อพูดถึงการตรวจจับสี
เซ็นเซอร์ตรวจจับดวงตาจะตรวจจับ 'ค่าความเข้มสี' ซึ่งสอดคล้องกับสีไม่ใช่ "สี" โดยเฉพาะ มีหลายเฉดสีได้แก่สีแดงสีน้ำเงินและสีเขียวและแต่ละเฉดมีค่าความเข้มสีของตัวเอง สีที่ถูกรายงานว่าตรวจพบโดยเซ็นเซอร์เป็นช่วงของค่าความเข้มสีที่สัมพันธ์กับ 'สีแดง' 'สีน้ำเงิน' หรือ 'สีเขียว' เซ็นเซอร์ตรวจจับดวงตาจะตรวจจับค่าความเข้มสีของวัตถุที่อยู่ด้านหน้าและหากค่านั้นอยู่ในช่วงที่อยู่ในแนวเดียวกันกับ 'สีแดง' 'สีน้ำเงิน' หรือ 'สีเขียว' สีจะถูกรายงานเช่นนั้น
มีกลยุทธ์การแก้ไขปัญหาหลายอย่างที่คุณสามารถพยายามทำให้โครงการทำงานได้ตามที่ตั้งใจไว้
- ปรับแสงโดยรอบ - เซ็นเซอร์ตรวจจับดวงตาบนหุ่นยนต์ 123 มีความไวต่อ แสง หากแสงโดยรอบในห้องมืดหรือส่องแสงสีเหลืองเนื่องจากไฟเรืองแสงอาจส่งผลต่อการอ่านค่าสีของเซ็นเซอร์ตรวจจับดวงตา ลองย้ายการตั้งค่าไปยังพื้นที่ที่สว่างกว่าในห้องเรียนหรือเปิดไฟเพิ่มเติมเพื่อดูว่าจะช่วยให้หุ่นยนต์ตรวจจับสีได้แม่นยำขึ้นหรือไม่
- ทดสอบการตรวจจับสีโดยใช้หุ่นยนต์ 123 ตัวอื่น - ค่า 'สีแดง ',' สีเขียว 'และ' สีน้ำเงิน 'ที่ตรวจพบโดยเซ็นเซอร์ตรวจจับดวงตาจะอยู่ในแนว เดียวกัน กับค่าความเข้มสีแดงสีเขียวและสีน้ำเงินของหุ่นยนต์ 123 ตัว แทนที่หมาป่าสีแดงด้วยหุ่นยนต์ 123 สีแดงและดำเนินโครงการ หากตอนนี้โครงการดำเนินไปตามที่ตั้งใจไว้ตรวจสอบให้แน่ใจว่าสีของหมาป่าเหมือนกันหรือมีสีใกล้เคียงกับสีแดงของหุ่นยนต์ 123 ตัว
- ทดสอบการตรวจจับสีโดยใช้แอป ห้องเรียน - เมื่อเปิดหุ่นยนต์ 123
เปิดแอปห้องเรียน เลือกหุ่นยนต์ที่คุณกำลังทดสอบและเลือก
'แสดงข้อมูลอุปกรณ์' เมื่อเปิดข้อมูลอุปกรณ์เซ็นเซอร์แรกที่แสดงข้อมูลคือเซ็นเซอร์ตรวจจับดวงตา
เซ็นเซอร์ตรวจจับดวงตาจะรายงานสีที่เซ็นเซอร์ตรวจจับ (สีแดงสีน้ำเงินสีเขียวหรือ N/A)
และตรวจจับค่าความเข้มสีในหน่วยองศา วางหุ่นยนต์ 123
ตัวไว้ด้านหน้าหมาป่าสีแดงและดูว่ามีการรายงานสีและค่าความเข้มสีใดในแอปห้องเรียน
- หากสีที่รายงานไม่ใช่ 'สีแดง' ให้แทนที่หมาป่าสีแดงด้วยหุ่นยนต์ 123 สีแดงก่อนแล้วดูว่าหุ่นยนต์รายงานเป็นสีแดงหรือไม่ หากเป็นเช่นนั้นให้ปรับสีของหมาป่าสีแดงให้ตรงกับหุ่นยนต์สีแดงมากขึ้นและใช้การอ่านแอปในชั้นเรียนเพื่อช่วยคุณในกระบวนการนี้
- นอกจากนี้คุณยังสามารถลองปรับแสงโดยรอบในห้องเรียนเพื่อดูว่าจะช่วยให้การอ่านสีของคุณมีความแม่นยำมากขึ้นหรือไม่
- ดูการใช้แอปห้องเรียนเพื่อแก้ไขปัญหาบทความหุ่นยนต์ 123 ของคุณสำหรับข้อมูลเพิ่มเติม
- ดูบทความ การแก้ไขปัญหา เซ็นเซอร์ vex 123 สำหรับขั้นตอนและข้อมูลการแก้ไขปัญหาเพิ่มเติม