
Contexte
La Little Red Robot Unit utilise l'histoire du Petit Chaperon Rouge comme un véhicule pour introduire les concepts de codage de séquence, de sélection et d'itération – les éléments constitutifs d'un algorithme. Les élèves exploreront la séquence dans le laboratoire 1, en codant leur petit robot rouge pour se rendre chez grand-mère en utilisant différentes séquences de cartes Drive Coder. Dans le laboratoire 2, ils exploreront la sélection, en utilisant la carte du codeur « Conduire jusqu'à l'objet » et le capteur oculaire pour faire fonctionner le robot jusqu'à ce qu'un objet soit détecté. Dans le laboratoire 3, les élèves s'appuieront sur leurs projets pour ajouter un conditionnel à l'aide des cartes de codeur « Si rouge », « Sinon » et « Fin si ». Ils exploreront ensuite l'itération, en utilisant la carte « Aller au début » pour créer un « algorithme de détection de loup ».
Qu'est-ce qu'un algorithme ?
Les algorithmes vous permettent de coder votre robot pour prendre des décisions de manière autonome en réponse aux données de son environnement. Un algorithme est un ensemble précis d'instructions qui utilise la séquence, la sélection et l'itération (ou boucles) pour permettre à votre robot d'effectuer des tâches plus difficiles, même si l'environnement change.
- La séquence est l'ordre dans lequel les commandes sont exécutées, l'une après l'autre. Chaque fois que les élèves codent le robot 123, ils séquencent les cartes du codeur dans le bon ordre pour atteindre leur objectif.
- La sélection fait référence à l'utilisation des données des capteurs pour prendre une décision dans le cadre d'un projet. Cela se produit lorsque les élèves codent le robot 123 pour utiliser les données du capteur oculaire, comme ils le font dans les laboratoires 2 avec la carte de codeur « Drive until object », et dans le laboratoire 3 lorsqu'ils codent le robot pour effectuer différents comportements en fonction de la couleur de l'objet détecté.
- L'itération est la répétition des comportements dans un projet. Les élèves créent une « boucle » (ou itération) dans leurs projets lorsqu'ils ajoutent la carte de codeur « Aller au début » pour répéter leur projet, comme ils le font dans le laboratoire 3.
Séquence - Comment le séquençage est-il utilisé dans cette unité ?
La séquence est l'ordre dans lequel les cartes de codeur sont exécutées dans un projet. Les cartes du codeur s'exécutent en commençant par la carte insérée en haut du codeur, puis en descendant une à la fois.
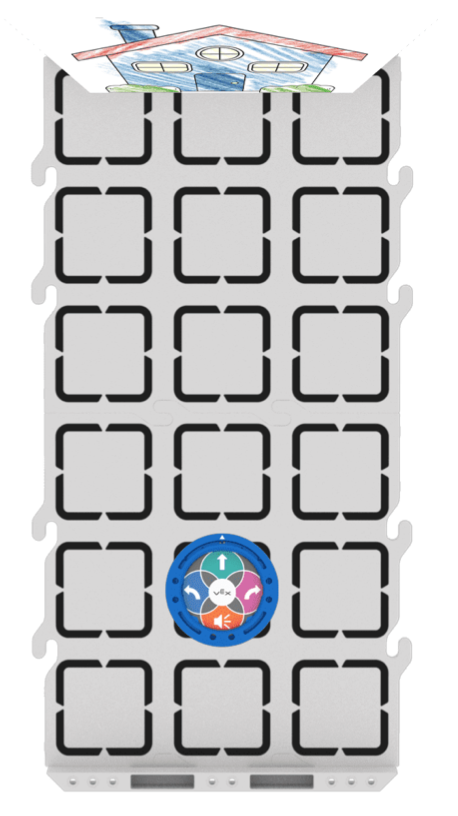
Dans cette animation, vous pouvez voir comment le projet commence avec la carte « Quand commencer 123 » en haut du codeur, puis chaque carte de codeur est exécutée dans l'ordre de haut en bas. Le robot 123 fait avancer quatre espaces sur un champ 123. La fonction de surbrillance verte à gauche du codeur indique quelle carte de codeur individuelle est en cours d'exécution à ce moment-là. Cela peut fournir aux élèves des commentaires immédiats pour relier les comportements du robot 123 à des cartes de codeur spécifiques.
Étapes de planification et de séquençage des cartes de codeur dans un projet
-
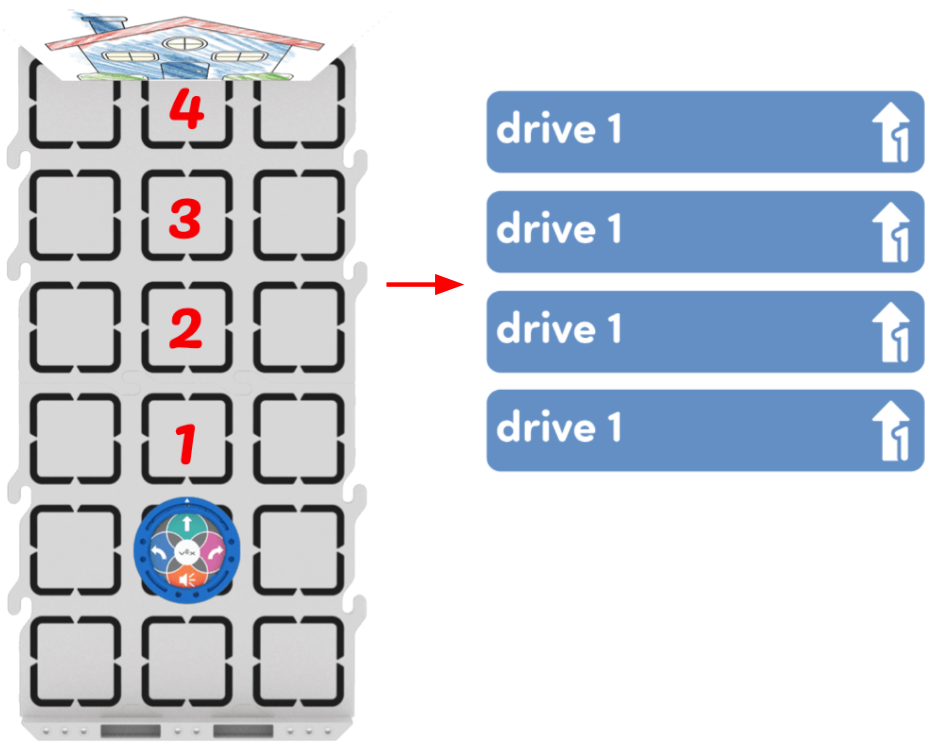
Tout d'abord, identifiez l'objectif - que faut-il faire ? Par exemple, conduisez du début jusqu'à la maison de grand-mère.
- Ensuite, décomposez les étapes nécessaires pour atteindre l'objectif et identifiez les cartes de codeur
nécessaires pour accomplir ces étapes. Ici, vous devrez avancer de quatre pas pour atteindre la maison de
grand-mère. Cela peut être accompli avec quatre cartes « Drive 1 ».
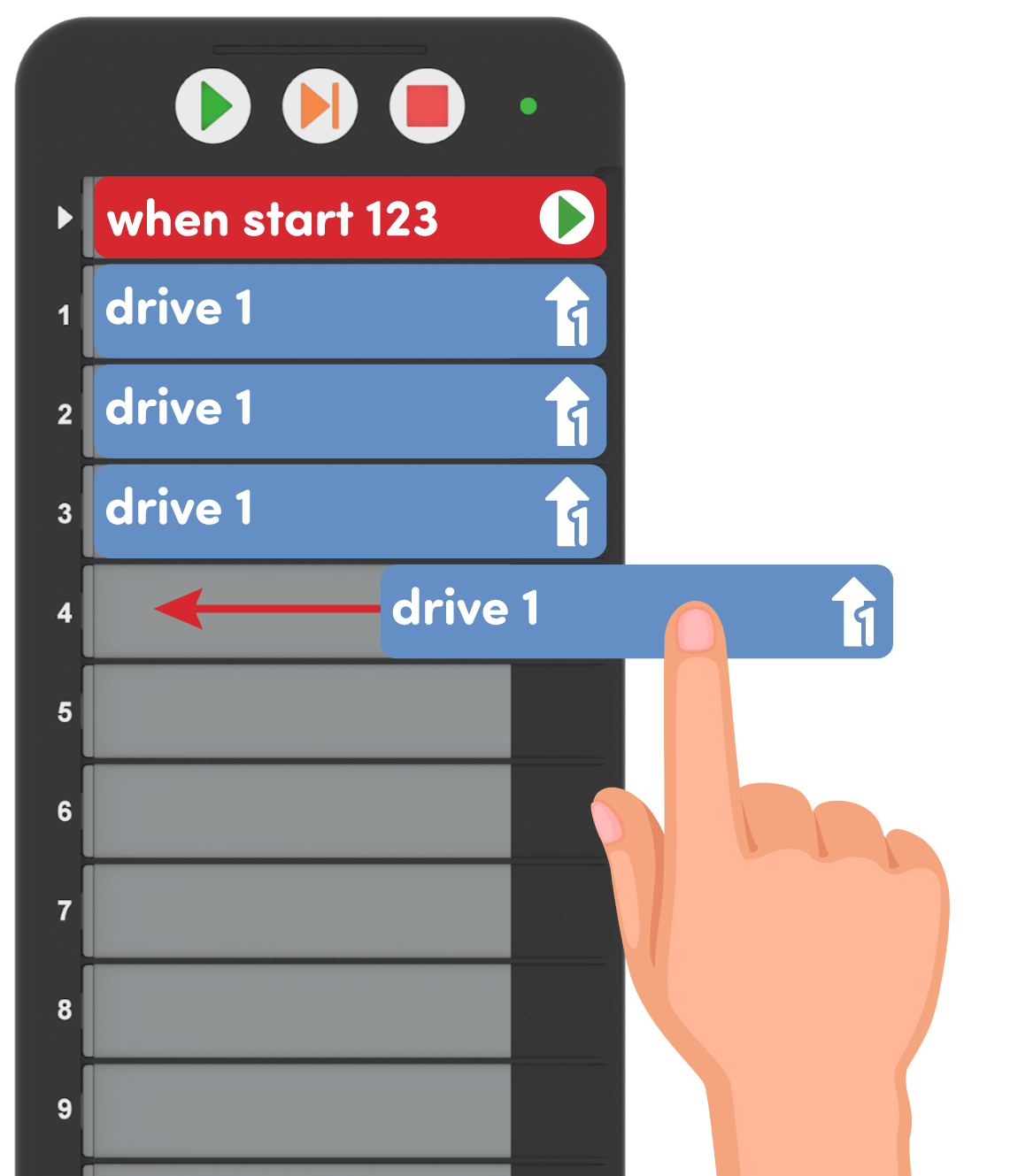
- Ensuite, planifiez la séquence du projet en disposant les cartes Coder sur la table. Une fois que vous
êtes satisfait de leur plan de projet, insérez les cartes du codeur dans le codeur en commençant par le
haut et en descendant.
- Sélectionnez « Démarrer » pour tester le projet et voir si le robot 123 atteint l'objectif identifié à
la première étape.

Si vous souhaitez modifier votre projet, il vous suffit de retirer les cartes Coder du Coder, de réorganiser les cartes et de les réinsérer dans le Coder pour mettre à jour votre projet.
Sélection - Qu'est-ce qu'un capteur ?
Un capteur est, par essence, un dispositif qui aide un robot à comprendre le monde qui l'entoure. Il le fait en collectant et en rapportant des données sur son environnement, qui peuvent ensuite être utilisées dans un projet pour que le robot prenne des décisions ou adopte certains comportements. Cette séquence peut être considérée comme une boucle de décision Sense → Think → Act.
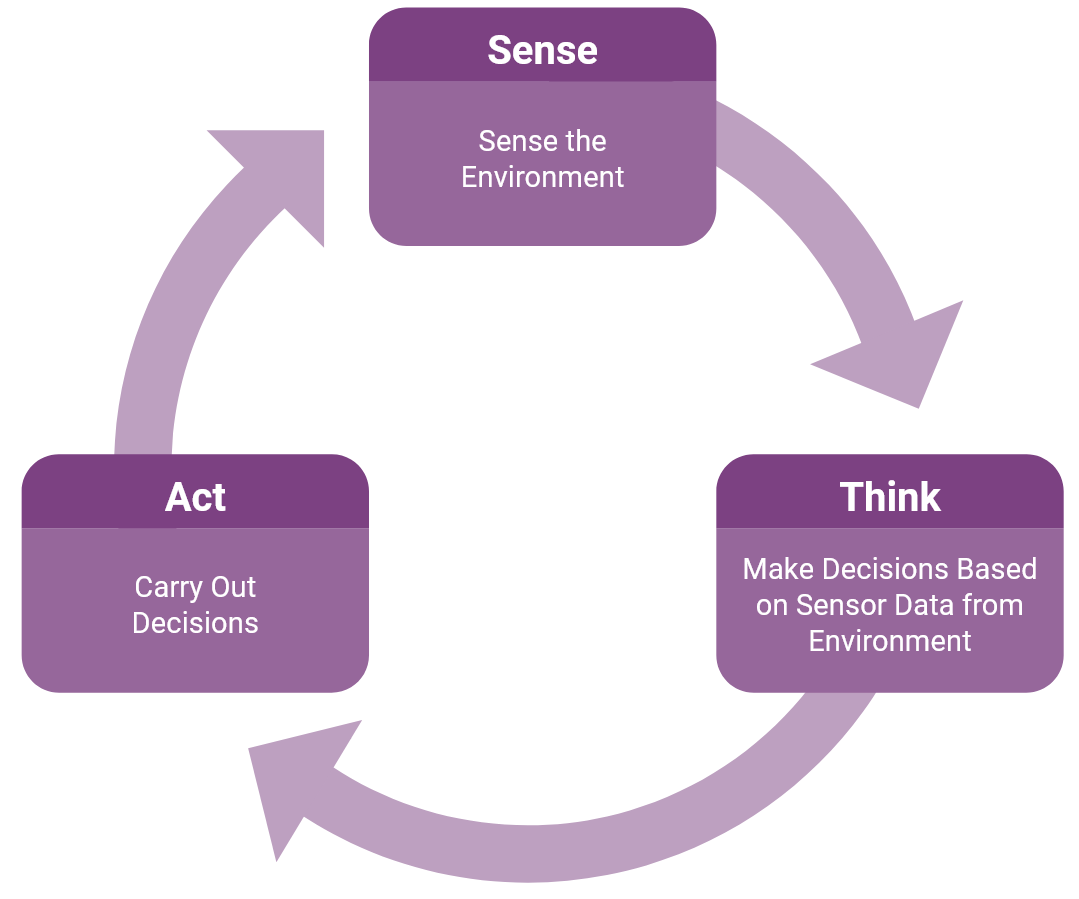
Un robot 123 utilise des capteurs pour collecter des données de son environnement (Sense), prendre des décisions en fonction de ces informations (Think) et transformer ces informations en instructions de comportement (Act).
Dans cette unité, les élèves coderont le robot 123 pour détecter le loup sur son chemin vers la maison de grand-mère. Le projet que les étudiants créent exécute la boucle de décision Sense → Think → Act car le capteur oculaire « détecte » la présence d'un objet (le « loup »), puis il « pense » ou prend la décision d' arrêter de conduire lorsque l'objet est détecté, puis le robot 123 agit et arrête d' avancer.
Qu'est-ce que le capteur oculaire ?
Le capteur oculaire du robot 123 est situé sur le côté avant, sous la flèche blanche. Le capteur oculaire peut être utilisé pour détecter la présence ou l'absence d'un objet, ainsi que sa couleur ou son niveau de luminosité.

Dans cette unité, le capteur oculaire sera utilisé pour détecter lorsqu'un objet (la maison de la grand-mère ou le loup) est présent sur le trajet du robot 123. La position du capteur oculaire sur le robot 123 signifie qu'il ne peut détecter que les objets directement devant lui. Gardez cela à l'esprit lorsque vous placez vos 123 robots et loups avec vos élèves afin que le matériel prépare les élèves à la réussite.

Pour plus d'informations sur la façon de coder le capteur oculaire avec le codeur, consultez l'article Codage du capteur oculaire VEX 123 à l'aide de la bibliothèque VEX du codeur.
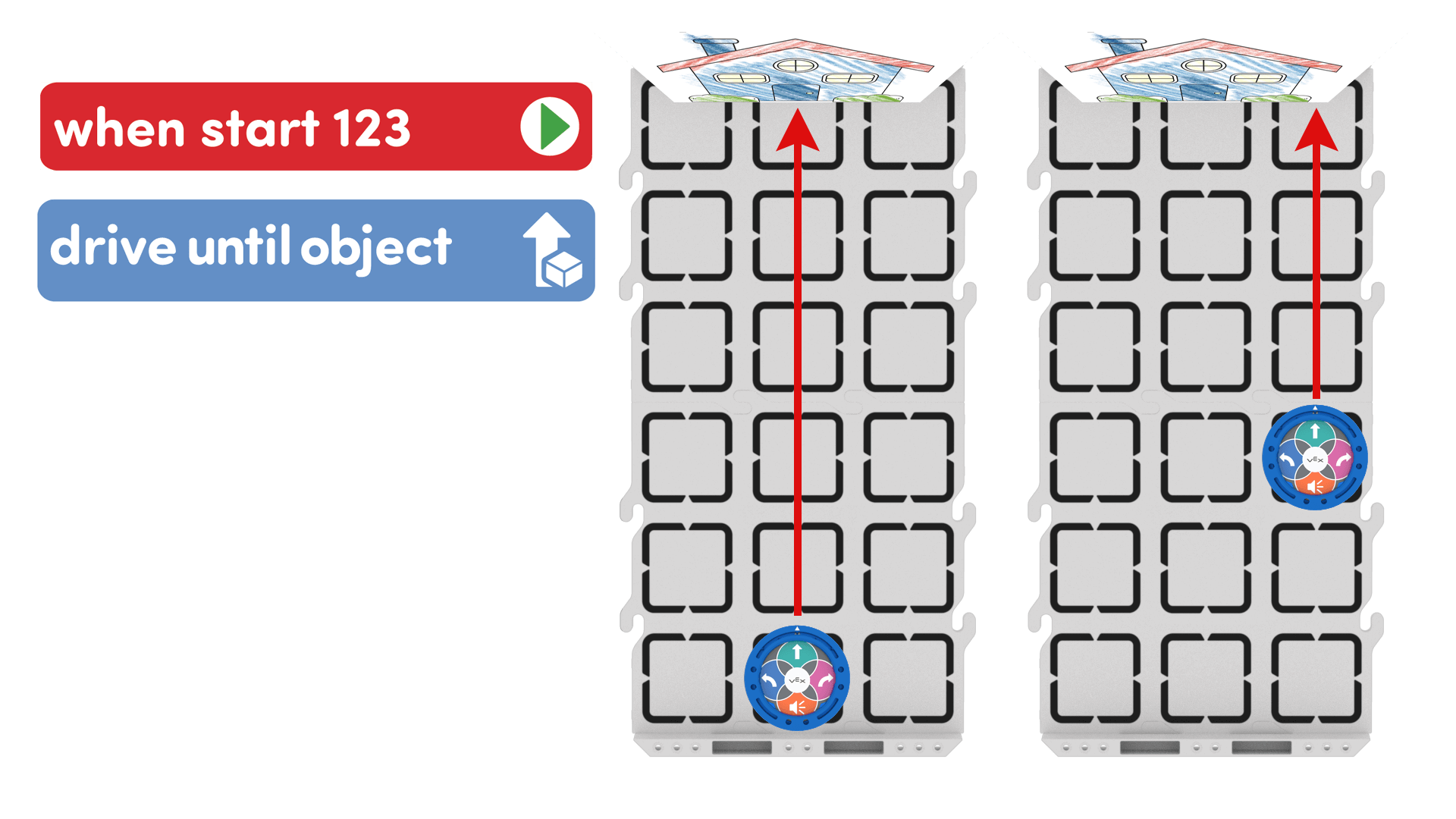
Comment fonctionne la carte codeur « Drive until object » ?
La carte du codeur « Drive until object » utilise les données du capteur oculaire pour faire avancer le robot 123 jusqu'à ce que le capteur oculaire signale qu'un objet est détecté. Lorsqu'un objet est détecté, le robot 123 arrête de conduire.
![]()
Ceci est utile dans un projet lorsque l'emplacement exact d'un objet ou d'un obstacle est inconnu ou ne peut pas être planifié. Dans cette unité, les élèves utiliseront d'abord la carte de codeur « Conduire jusqu'à l'objet » pour voir que le robot 123 peut se rendre à la maison de grand-mère avec succès avec le même projet, peu importe où il commence son voyage.
Comment les cartes de codeur « Si rouge », « Sinon » et « Fin si » fonctionnent-elles ensemble ?
Ces cartes de codeur peuvent être utilisées pour créer un projet dans lequel le robot utilise les données du capteur oculaire sur la couleur détectée pour prendre une décision et effectuer différents comportements en fonction de la couleur détectée.
Dans le laboratoire 3, les élèves utiliseront la couleur de l'objet détecté pour coder le robot 123 afin d'effrayer le loup rouge ou de sonner à la porte de la maison de grand-mère. Ceci est structuré à l'aide des cartes de codeur « Si rouge », « Sinon » et « Fin si ». Ces cartes fonctionnent ensemble pour former une déclaration conditionnelle. Une instruction conditionnelle est utilisée pour exécuter une séquence particulière d'instructions si la condition est remplie (déclaration VRAIE), et un autre ensemble d'instructions si la condition N'EST PAS remplie (déclaration FAUSSE), « ramifiant » ainsi le flux de projet. Une seule branche de l'instruction conditionnelle sera exécutée lorsque le projet sera exécuté, ce qui amènera le robot à prendre une décision. Dans le laboratoire 3, la condition vérifiée est la condition d'être rouge (carte de codeur « Si rouge »). L'objet détecté sera soit signalé comme rouge (VRAI), soit signalé comme non rouge (FAUX).

L'image ci-dessus montre le processus de prise de décision et comment le branchement fonctionne avec le projet. Le « End if » est utilisé pour mettre fin à l'énoncé conditionnel et signaler que la partie prise de décision du projet est terminée - c'est la fin du processus de prise de décision if. Toutes les commandes ajoutées après cette carte seront terminées une fois la décision prise.

Cette animation montre le projet du laboratoire 3. Regardez la mise en surbrillance sur le codeur pour voir comment le flux de projet évolue au fur et à mesure que la décision est prise.
Itération - Comment fonctionne la carte de codeur « Aller au démarrage » ?
La carte de codeur « Aller au démarrage » crée une boucle éternelle, ce qui provoque le retour du projet à la carte de codeur « Quand démarrer 123 » et la répétition des comportements en séquence pour toujours, jusqu'à ce que le projet soit arrêté.
Ceci est utile dans un projet pour amener le robot à répéter continuellement les mêmes comportements ou à
prendre la même décision encore et encore. Dans le laboratoire 3, la carte du codeur « Aller au
démarrage » est placée après la détection de l'objet et la prise de décision. Cela répète cette prise de
décision encore et encore, ce qui rend le projet et l'algorithme.
Stratégies d'enseignement avec le codeur de cette unité
Le codeur offre aux étudiants et aux enseignants la possibilité de s'engager et de partager du code facilement et concrètement tout au long des activités d'un laboratoire.
Prise en charge des pré-lecteurs ou des premiers lecteurs — Les cartes de codage sont conçues pour prendre en charge les pré-lecteurs, ou les premiers lecteurs, en utilisant des icônes pour représenter les mots de la carte elle-même, afin que les élèves puissent essentiellement lire les images s'ils ne peuvent pas encore lire les mots. Encouragez les élèves à utiliser ces images d'icônes pour les aider à construire leurs projets. Renforcez cela en vous référant aux images sur les cartes Coder lorsque vous les nommez avec les élèves, comme « La carte When start 123 Coder, celle avec la flèche verte, passe toujours en premier. »

Vérifier et partager le code facilement — Une fois que les cartes Coder sont chargées dans le Coder, les élèves peuvent tenir leur Coder pour afficher leur code, tout comme ils tiendraient un tableau blanc avec une solution mathématique dessus. Utilisez cette stratégie pendant l'enseignement en groupe, comme un moyen de vérifier l'exactitude des élèves avant qu'ils ne commencent leurs projets. Vous pouvez rapidement et facilement voir si les bonnes cartes Coder sont utilisées, si elles sont insérées dans le bon ordre, et assurez-vous qu'elles ne sont pas à l'envers ou à l'envers. Lorsque vous vous enregistrez avec des groupes pour faciliter l'activité indépendante, regardez les cartes Coders et Coder pour vérifier la progression.
De quelles cartes de codeur avez-vous besoin ?
Les cartes de codeur représentent 123 commandes de robot qui sont insérées dans le codeur et utilisées pour coder le robot 123. Vous trouverez ci-dessous une liste des principales cartes de codeur utilisées au cours de cette unité. Voir la section Configuration de l'environnement du résumé dans chaque laboratoire pour plus d'informations sur l'organisation et la distribution des cartes Coder à vos élèves.
| Carte de codeur | Comportement | Exemple |
|---|---|---|
 |
Démarre le projet lorsque le bouton « Démarrer » du codeur est enfoncé. | |
 |
123 Le robot fera avancer 1 longueur de robot. Ceci est égal à 1 carré sur le champ 123. |  |
 |
123 Le robot fera avancer 2 longueurs de robot. Cela équivaut à 2 carrés sur le champ 123. | 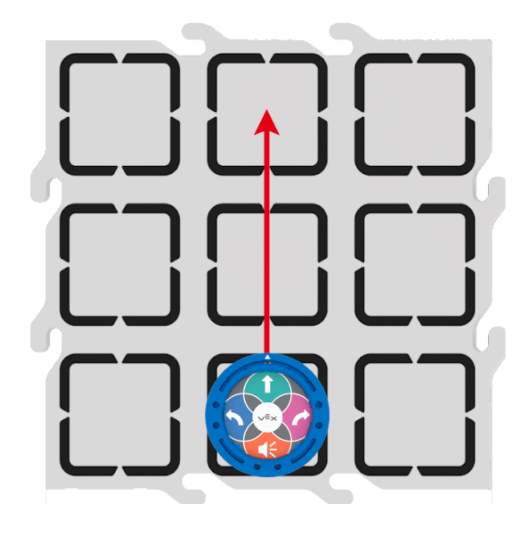 |
 |
123 Le robot entraînera vers l'avant 4 longueurs de robot. Cela équivaut à 4 carrés sur le terrain 123. |  |
 |
123 Le robot avance jusqu'à ce que le capteur oculaire détecte un objet. | 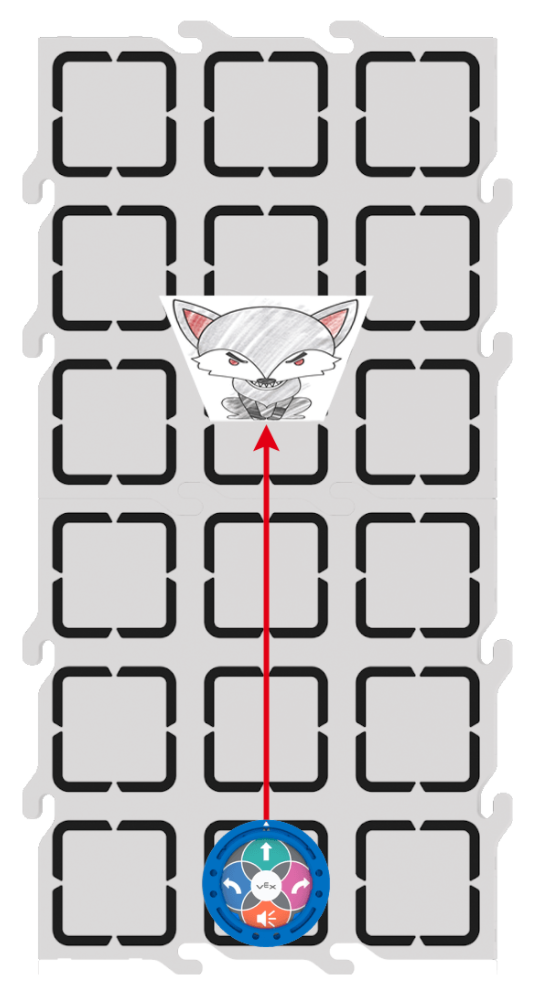 |
 |
Utilise le capteur oculaire pour vérifier si la couleur rouge est détectée. | |
 |
Utilisé avec une carte de codeur « If ». La carte de codeur 'Else' exécutera les cartes de codeur sous le 'Else' si la condition de la carte de codeur 'If' n'est pas remplie. | |
 |
Termine une séquence de cartes de codeur « If » et « Else » | |
 |
Le codeur reboucle sur la carte de codeur « When start 123 » et continue à exécuter le projet. |
Offrez aux élèves des cartes Coder supplémentaires des catégories Apparences ou Sons pour développer leurs projets afin d'effrayer le Loup en jeu Partie 2 du Labo 2. Pour une liste complète des cartes Coder et de leurs comportements, consultez l'article VEX Coder Card Reference Guide VEX Library.
Dépannage du capteur oculaire dans le laboratoire 3
Si votre projet dans le laboratoire 3 ne fonctionne pas comme prévu, le problème peut provenir de la façon dont le capteur oculaire détecte les objets et leurs couleurs dans votre salle de classe. Avant de dépanner le capteur oculaire, il peut être utile de comprendre un peu son fonctionnement en matière de détection des couleurs.
Le capteur oculaire détecte une « valeur de teinte » qui s'aligne sur une couleur, et non sur une « couleur » en particulier. Il existe de nombreuses nuances de rouge, de bleu et de vert, et chacune a sa propre valeur de teinte. Les couleurs qui sont signalées comme détectées par le capteur sont en fait des plages de valeurs de teinte qui correspondent à « rouge », « bleu » ou « vert ». Le capteur oculaire détecte la valeur de teinte de l'objet devant lui, et si cette valeur se situe dans la plage alignée sur « rouge », « bleu » ou « vert », la couleur est signalée comme telle.
Il existe plusieurs stratégies de dépannage que vous pouvez également essayer de faire fonctionner le projet comme prévu.
- Réglez la lumière ambiante - Le capteur oculaire du robot 123 est sensible à la lumière. Si la lumière ambiante dans la pièce est sombre ou jette une teinte jaune, comme les lumières fluorescentes peuvent le faire, cela peut affecter les lectures de couleur du capteur oculaire. Essayez de déplacer votre configuration vers un espace plus lumineux dans la salle de classe ou d'allumer des lumières supplémentaires pour voir si cela aide le robot à détecter les couleurs plus précisément.
- Testez la détection de couleur à l'aide d'un autre robot 123 - Les valeurs « rouge », « vert » et « bleu » détectées par le capteur oculaire sont alignées sur les valeurs de teinte rouge, verte et bleue des robots 123. Remplacez le loup rouge par un robot rouge 123 et exécutez le projet. Si le projet fonctionne maintenant comme prévu, assurez-vous que la couleur du loup est la même ou une teinte similaire au rouge du robot 123.
- Testez la détection de couleur à l'aide de l'application Classroom - Avec le robot
123 activé, ouvrez l'application Classroom, sélectionnez le robot que vous testez et sélectionnez
« Afficher les informations de l'appareil ». Lorsque les informations sur l'appareil sont ouvertes,
le premier capteur affichant des données est le capteur oculaire. Le capteur oculaire signale la couleur
que le capteur détecte (rouge, bleu, vert ou N/A) et la valeur de teinte détectée en degrés. Placez le
robot 123 devant le loup rouge et regardez quelle couleur et quelle valeur de teinte sont signalées dans
l'application Classroom.
- Si la couleur signalée n'est pas « rouge », remplacez d'abord le loup rouge par un robot rouge 123 et voyez si le robot signale rouge. Si c'est le cas, ajustez la couleur du loup rouge pour qu'elle corresponde mieux au robot rouge et utilisez les lectures de l'application Classroom pour vous aider dans ce processus.
- Vous pouvez également essayer d'ajuster l'éclairage ambiant dans la salle de classe, pour voir si cela aide vos lectures de couleurs à être plus précises.
- Consultez l'article Utilisation de l'application Classroom pour dépanner votre robot 123 pour plus d'informations.
- Consultez l'article Dépannage des capteurs VEX 123 pour obtenir des étapes et des informations de dépannage supplémentaires.