
Contesto
L'Unità Little Red Robot utilizza la storia di Little Red Riding Hood come veicolo per introdurre i concetti di codifica di sequenza, selezione e iterazione, gli elementi costitutivi di un algoritmo. Gli studenti esploreranno la sequenza nel Laboratorio 1, codificando il loro piccolo robot rosso per guidare fino a casa della nonna utilizzando diverse sequenze di schede Drive Coder. Nel Laboratorio 2, esploreranno la selezione, utilizzando la scheda Codificatore "Guida fino all'oggetto" e il Sensore Oculare per far guidare il robot fino a quando non viene rilevato un oggetto. Nel Laboratorio 3, gli studenti costruiranno sui loro progetti per aggiungere un condizionale utilizzando le schede Coder "If red", "Else" e "End if". Esploreranno quindi l'iterazione, utilizzando la carta "Vai all'inizio" per creare un "Algoritmo di rilevamento del lupo".
Cos'è un algoritmo?
Gli algoritmi ti consentono di codificare il tuo robot per prendere decisioni in modo autonomo in risposta ai dati del suo ambiente. Un algoritmo è un insieme preciso di istruzioni che utilizza sequenza, selezione e iterazione (o loop) per consentire al robot di completare attività più impegnative, anche se l'ambiente cambia.
- La sequenza è l'ordine in cui i comandi vengono eseguiti, uno dopo l'altro. Ogni volta che gli studenti codificano il Robot 123, mettono in sequenza le schede Coder nell'ordine corretto per raggiungere il loro obiettivo.
- La selezione si riferisce all'utilizzo dei dati del sensore per prendere una decisione all'interno di un progetto. Ciò si verifica quando gli studenti codificano il robot 123 per utilizzare i dati del sensore oculare, come fanno nei laboratori 2 con la scheda codificatore "Drive until object" e nel laboratorio 3 quando codificano il robot per eseguire comportamenti diversi in base al colore dell'oggetto rilevato.
- L'iterazione è la ripetizione di comportamenti in un progetto. Gli studenti creano un "loop" (o iterazione) nei loro progetti quando aggiungono la scheda Coder "Vai all'inizio" per ripetere il loro progetto, come fanno nel Laboratorio 3.
Sequenza - Come viene utilizzato il sequenziamento in questa unità?
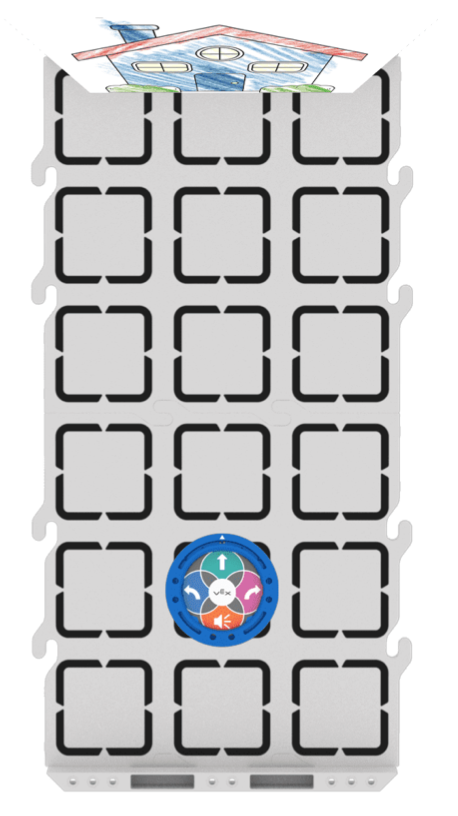
La sequenza è l'ordine in cui le schede Coder vengono eseguite in un progetto. Le schede del codificatore iniziano con la scheda inserita nella parte superiore del codificatore, per poi spostarsi una alla volta verso il basso.
In questa animazione, puoi vedere come inizia il progetto con la scheda "Quando inizia 123" nella parte superiore del codificatore, quindi ogni scheda codificatore viene eseguita in ordine dall'alto verso il basso. Il Robot 123 avanza di quattro spazi su un Campo 123. La funzione di evidenziazione verde sulla sinistra del codificatore indica quale singola scheda del codificatore è in esecuzione in quel momento. Questo può fornire agli studenti un feedback immediato per collegare i comportamenti del Robot 123 con specifiche schede Coder.
Passaggi per la pianificazione e la sequenza delle schede Coder in un progetto
-
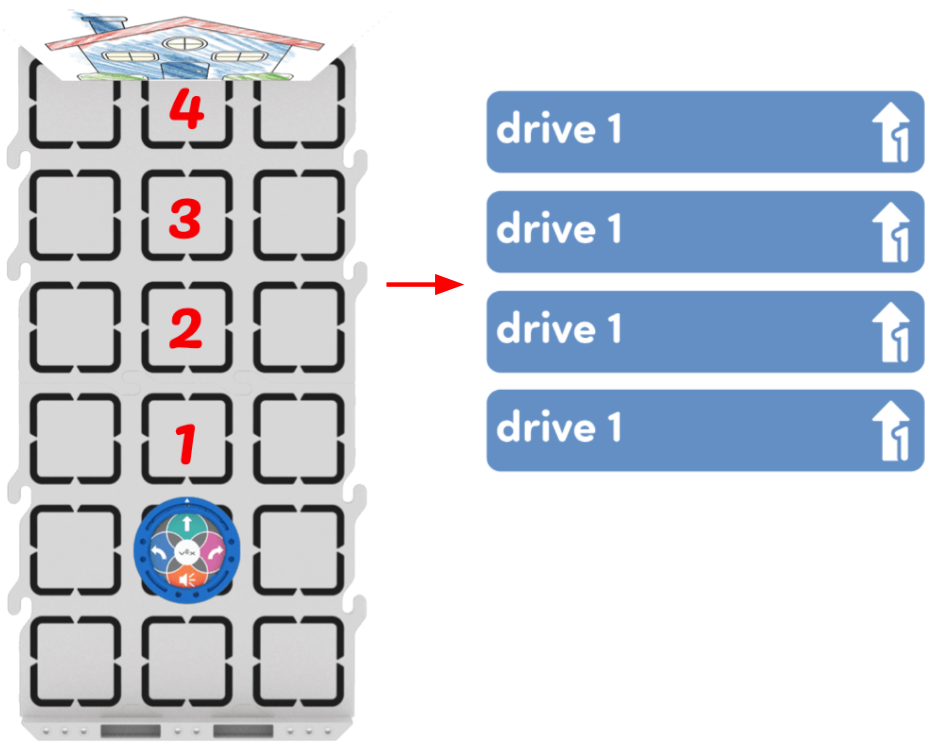
Innanzitutto, identifica l'obiettivo: cosa deve essere fatto? Ad esempio, guida dall'inizio a casa della nonna.
- Quindi, suddividi i passaggi necessari per raggiungere l'obiettivo e identifica le schede di codifica
necessarie per completare questi passaggi. Qui dovrai avanzare di quattro passi per raggiungere la casa
della nonna. Questo può essere ottenuto con quattro carte "Drive 1".
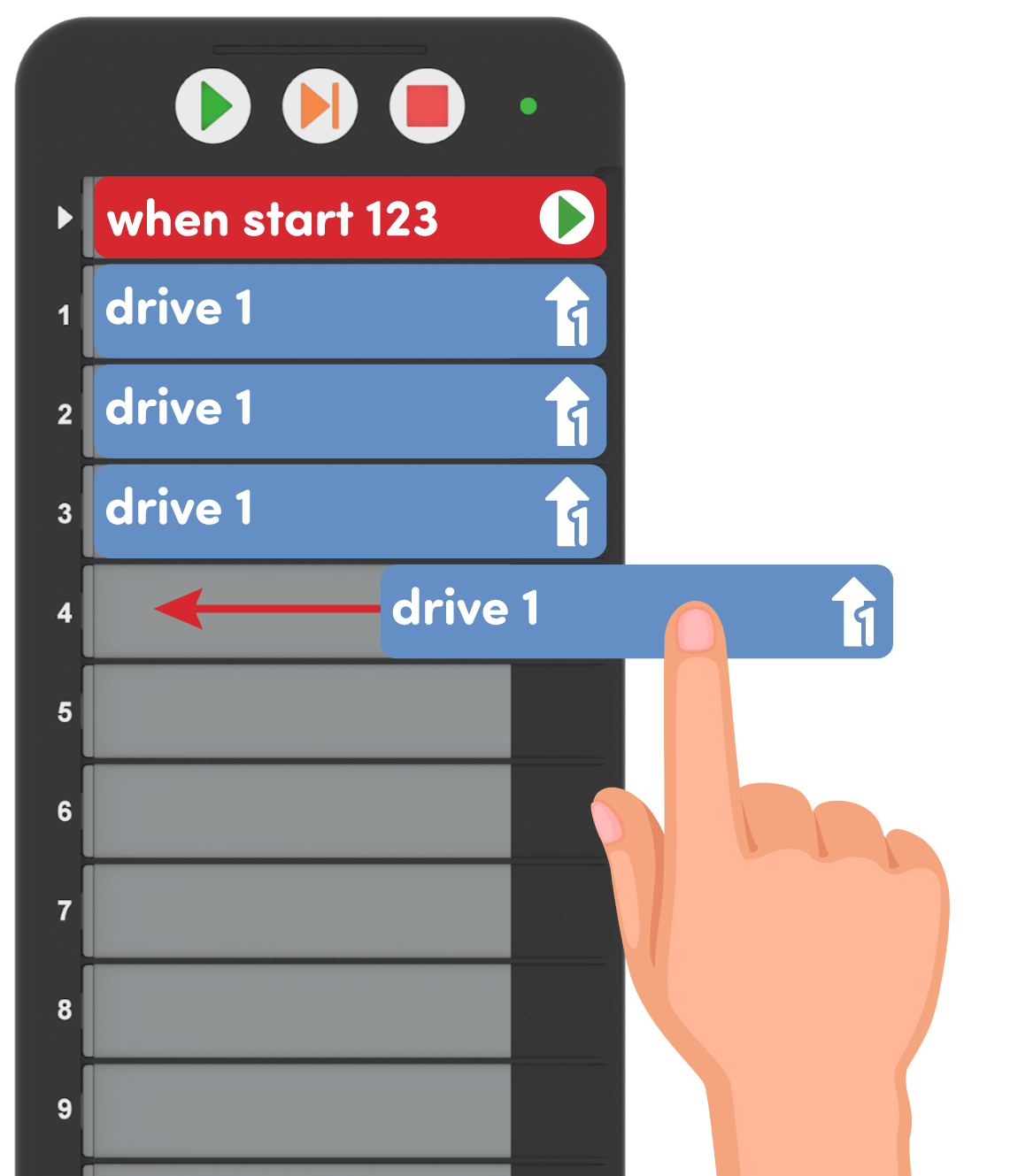
- Successivamente, pianifica la sequenza del progetto disponendo le schede Coder sul tavolo. Una volta che
sei soddisfatto del loro piano di progetto, inserisci le schede Coder nel Coder partendo dall'alto e
procedendo verso il basso.
- Selezionare "Start" per testare il progetto e vedere se il Robot 123 raggiunge l'obiettivo identificato
nel primo passaggio.

Se si desidera modificare il progetto, è sufficiente rimuovere le schede Coder dal codificatore, riorganizzare le schede e inserirle nuovamente nel codificatore per aggiornare il progetto.
Selezione - Cos'è un sensore?
Un sensore è, in sostanza, un dispositivo che aiuta un robot a comprendere il mondo che lo circonda. Lo fa raccogliendo e riportando dati sul suo ambiente, che possono quindi essere utilizzati in un progetto per prendere decisioni o eseguire determinati comportamenti. Questa sequenza può essere pensata come un ciclo decisionale Sense → Think → Act.
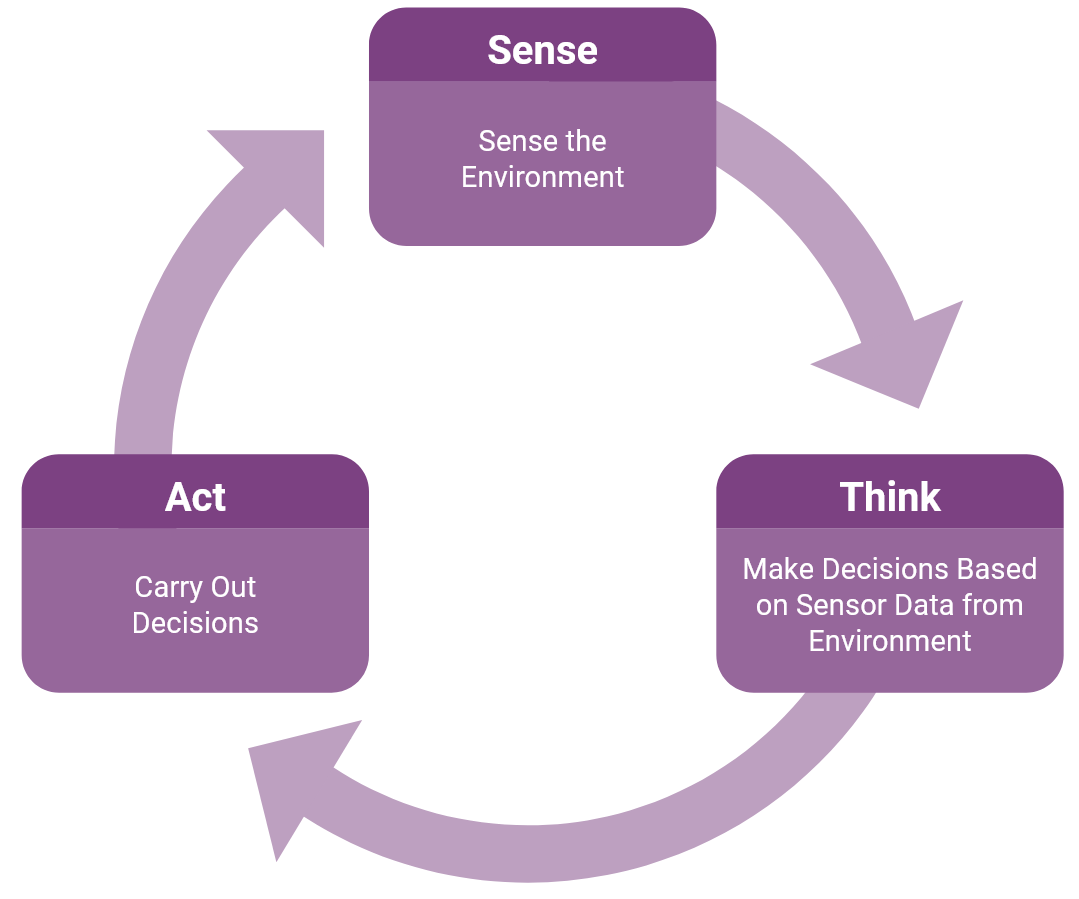
Un robot 123 utilizza sensori per raccogliere dati dall'ambiente circostante (Sense), prendere decisioni basate su queste informazioni (Think) e trasformare tali informazioni in istruzioni per i comportamenti (Act).
In questa Unità, gli studenti codificheranno il Robot 123 per rilevare il Lupo nel suo percorso verso la casa della Nonna. Il progetto che gli studenti creano esegue il ciclo decisionale Sense → Think → Act in quanto il sensore oculare "percepirà" la presenza di un oggetto (il "lupo"), quindi "penserà" o prenderà la decisione di smettere di guidare quando l'oggetto viene rilevato, quindi il robot 123 agirà e smetterà di andare avanti.
Cos'è il sensore oculare?
Il sensore oculare sul robot 123 si trova sul lato frontale, sotto la freccia bianca. Il sensore oculare può essere utilizzato per rilevare la presenza o l'assenza di un oggetto, nonché il suo livello di colore o luminosità.

In questa Unità, il Sensore Oculare verrà utilizzato per rilevare quando un oggetto (la casa della Nonna o il Lupo) è presente nel percorso del Robot 123. La posizione del sensore oculare sul robot 123 significa che può rilevare solo oggetti direttamente di fronte ad esso. Sii consapevole di questo quando metti i tuoi 123 robot e lupi con i tuoi studenti in modo che i materiali stiano preparando gli studenti al successo.

Per ulteriori informazioni su come codificare il sensore oculare con il codificatore, vedere la codifica del sensore oculare VEX 123 utilizzando l'articolo Coder VEX Library.
Come funziona la scheda Codificatore "Drive until object"?
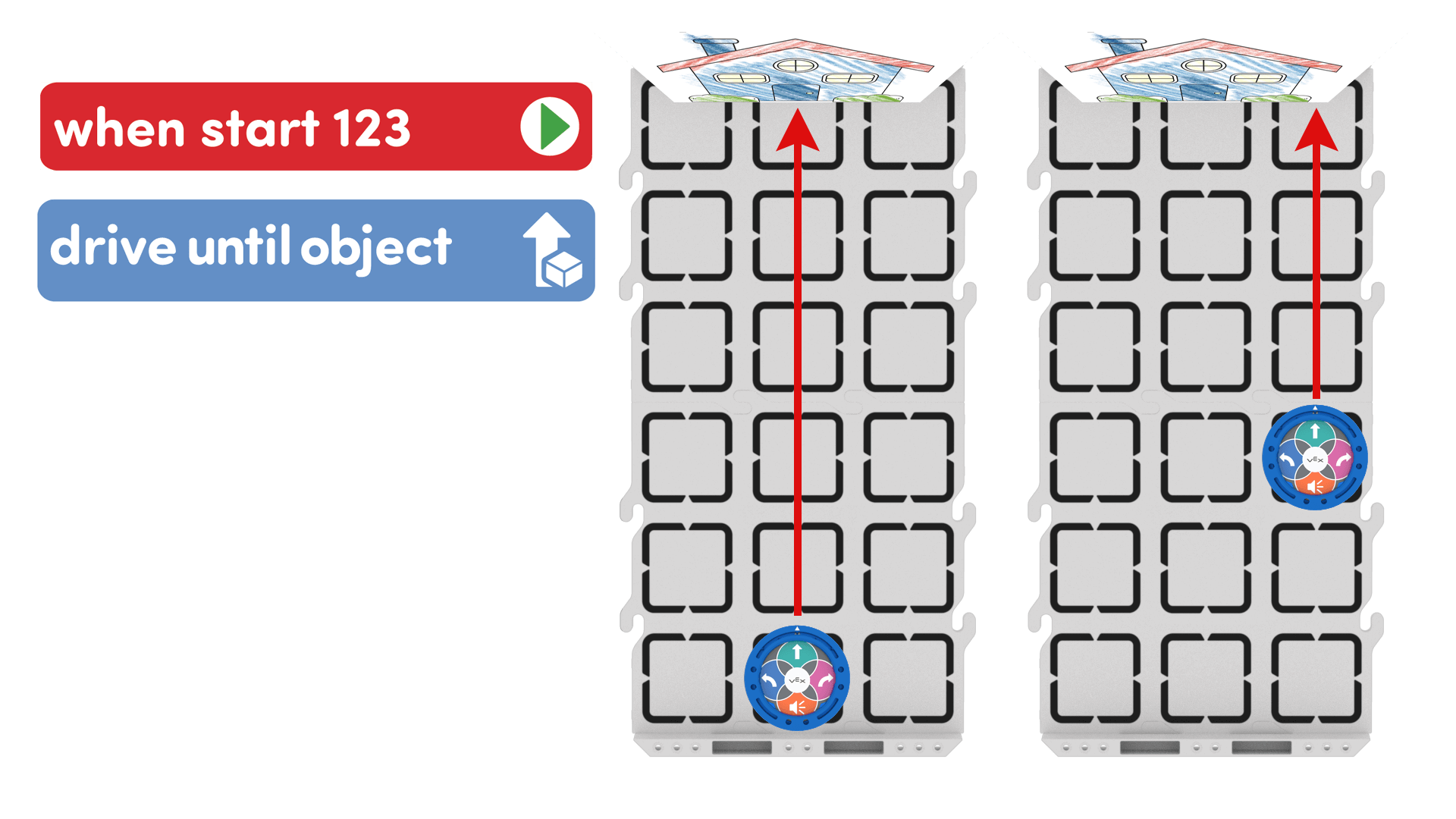
La scheda codificatore "Guida fino all'oggetto" utilizza i dati del sensore oculare per far avanzare il robot 123 fino a quando il sensore oculare segnala che viene rilevato un oggetto. Quando viene rilevato un oggetto, il Robot 123 smetterà di guidare.
![]()
Ciò è utile in un progetto quando la posizione esatta di un oggetto o di un ostacolo è sconosciuta o non può essere pianificata. In questa Unità, gli studenti utilizzeranno prima la scheda Codificatore "Guida fino all'oggetto" per vedere che il Robot 123 può guidare con successo a casa della Nonna con lo stesso progetto, indipendentemente da dove inizia il suo viaggio.
Come funzionano insieme le schede Coder "If red", "Else" e "End if"?
Queste schede Coder possono essere utilizzate per creare un progetto in cui il robot utilizza i dati del sensore oculare sul colore rilevato per prendere una decisione ed eseguire comportamenti diversi in base al colore rilevato.
Nel Laboratorio 3, gli studenti useranno il colore dell'oggetto rilevato per codificare il Robot 123 per spaventare il Lupo rosso o suonare il campanello della casa della nonna. Questo è strutturato utilizzando le schede Coder "If red", "Else" e "End if". Queste carte lavorano insieme per formare una dichiarazione condizionale. Un'istruzione condizionale viene utilizzata per eseguire una particolare sequenza di istruzioni se la condizione è soddisfatta (reporting TRUE) e un'altra serie di istruzioni se la condizione NON è soddisfatta (reporting FALSE), "ramificando" così il flusso del progetto. Solo un ramo della dichiarazione condizionale verrà eseguito quando il progetto viene eseguito, inducendo il robot a prendere una decisione. Nel Laboratorio 3, la condizione da controllare è la condizione di essere rosso (scheda Codificatore "Se rosso"). L'oggetto rilevato sarà segnalato come rosso (VERO) o segnalato come non rosso (FALSO).

L'immagine sopra mostra il processo decisionale e il modo in cui la diramazione funziona con il progetto. Il "End if" viene utilizzato per terminare la dichiarazione condizionale e segnalare che la parte decisionale del progetto è completa: questa è la fine del processo decisionale if. Eventuali comandi aggiunti dopo questa scheda verranno completati dopo che la decisione è stata presa.

Questa animazione mostra il progetto del Laboratorio 3. Guarda l'evidenziazione sul codificatore per vedere come si muove il flusso del progetto mentre viene presa la decisione.
Iterazione - Come funziona la scheda Coder “Go to start”?
La scheda Codificatore "Go to start" crea un ciclo infinito, facendo sì che il progetto ritorni alla scheda Codificatore "When start 123" e ripeta i comportamenti in sequenza per sempre, fino a quando il progetto non viene interrotto.
Questo è utile in un progetto per far sì che il robot ripeta continuamente gli stessi comportamenti o
prenda la stessa decisione più e più volte. Nel Laboratorio 3, la scheda Codificatore "Vai all'avvio"
viene posizionata dopo che l'oggetto viene rilevato e viene presa la decisione. Questo ripete quel
processo decisionale più e più volte, rendendo il progetto e l'algoritmo.
Strategie per insegnare con il codificatore in questa unità
Il codificatore offre a studenti e insegnanti l'opportunità di interagire e condividere il codice in modo semplice e tangibile durante le attività di un laboratorio.
Supportare i pre-lettori o i lettori precoci — Le schede Coder sono progettate per supportare i pre-lettori, o i primi lettori, utilizzando le icone per rappresentare le parole della scheda stessa, in modo che gli studenti possano essenzialmente leggere le immagini se non sono ancora in grado di leggere le parole. Incoraggia gli studenti a utilizzare queste immagini iconiche per aiutarli a costruire i loro progetti. Rafforzalo facendo riferimento alle immagini sulle schede Coder quando le nomini con gli studenti, come "La scheda Quando inizia 123 Coder, quella con la freccia verde, va sempre per prima".

Controlla e condividi facilmente il codice — Una volta caricate le schede Coder nel codificatore, gli studenti possono sollevare il loro codificatore per mostrare il loro codice, proprio come farebbero con una lavagna con una soluzione matematica. Utilizzare questa strategia durante l'istruzione di gruppo, come mezzo per verificare l'accuratezza degli studenti prima di iniziare i loro progetti. Puoi vedere rapidamente e facilmente se vengono utilizzate le schede Coder corrette, se sono inserite nell'ordine corretto e assicurarti che non siano capovolte o rovesciate. Quando effettui il check-in con i gruppi per facilitare l'attività indipendente, guarda le schede Codificatori e Codificatore per verificare i progressi.
Di quali schede Coder hai bisogno?
Le schede codificatrici rappresentano 123 comandi del robot che vengono inseriti nel codificatore e utilizzati per codificare il robot 123. Di seguito è riportato un elenco delle principali schede Coder utilizzate durante questa Unità. Consulta la sezione Configurazione dell'ambiente del Riepilogo in ciascun laboratorio per informazioni più dettagliate sull'organizzazione e la distribuzione delle schede Coder ai tuoi studenti.
| Scheda codificatore | Comportamento | Esempio |
|---|---|---|
 |
Avvia il progetto quando viene premuto il pulsante "Start" sul codificatore. | |
 |
123 Il robot porterà avanti 1 lunghezza del robot. Questo è uguale a 1 quadrato sul campo 123. |  |
 |
123 Il robot guiderà in avanti 2 lunghezze del robot. Questo è uguale a 2 quadrati sul campo 123. | 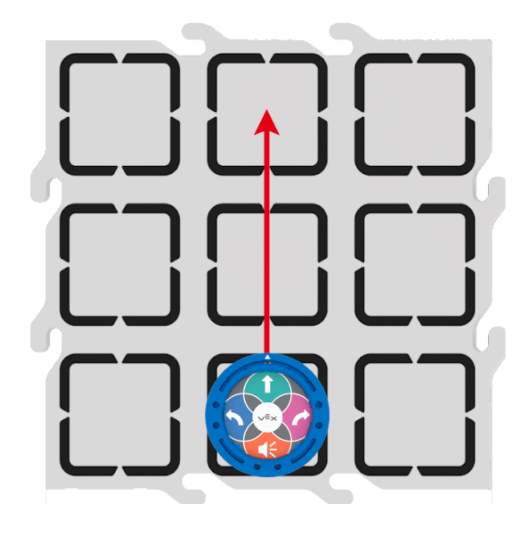 |
 |
123 Il robot guiderà in avanti 4 lunghezze del robot. Questo è uguale a 4 quadrati sul Campo 123. |  |
 |
123 Il robot avanzerà fino a quando il sensore oculare non rileverà un oggetto. | 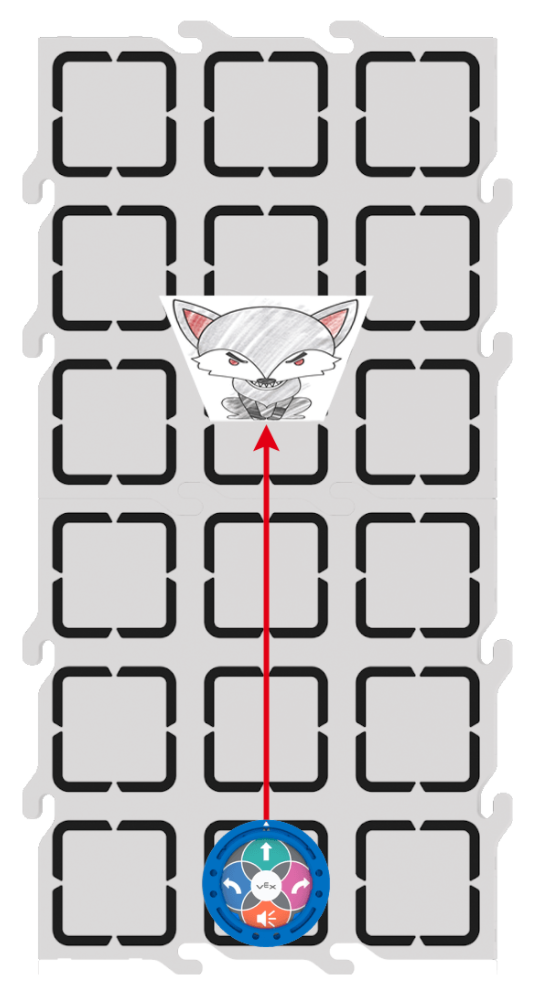 |
 |
Utilizza il sensore oculare per verificare se viene rilevato il colore rosso. | |
 |
Utilizzato insieme a una scheda codificatore "If". La scheda Coder "Else" eseguirà le schede Coder sotto la scheda "Else" se la condizione della scheda Coder "If" non viene soddisfatta. | |
 |
Termina una sequenza di schede Coder 'If' e 'Else' | |
 |
Il codificatore tornerà alla scheda codificatore "All'avvio 123" e continuerà a eseguire il progetto. |
Offri agli studenti carte Codificatore aggiuntive dalle categorie Looks o Sounds per espandere i loro progetti per spaventare il Lupo nella Parte 2 del Laboratorio 2. Per un elenco completo delle schede Coder e dei loro comportamenti, consultare l'articolo VEX Coder Card Reference Guide VEX Library.
Risoluzione dei problemi del sensore oculare in laboratorio 3
Se il tuo progetto in Lab 3 non funziona come previsto, il problema potrebbe risiedere nel modo in cui il sensore oculare rileva gli oggetti e i loro colori nella tua classe. Prima di risolvere i problemi del sensore oculare, può essere utile capire un po' come funziona quando si tratta di rilevamento del colore.
Il sensore oculare rileva un "valore di tonalità" che si allinea a un colore, non a un "colore" in particolare. Ci sono molte tonalità di rosso, blu e verde, e ognuna ha il suo valore di tonalità. I colori riportati come rilevati dal sensore sono in realtà intervalli di valori di tonalità correlati a "rosso", "blu" o "verde". Il sensore oculare rileva il valore di tonalità dell'oggetto di fronte ad esso e, se tale valore rientra nell'intervallo allineato a "rosso", "blu" o "verde", il colore viene segnalato come tale.
Esistono diverse strategie di risoluzione dei problemi che puoi anche provare a far funzionare il progetto come previsto.
- Regolare la luce ambientale - Il sensore oculare sul robot 123 è sensibile alla luce. Se la luce ambientale nella stanza è scura o emette una tonalità gialla, come potrebbero fare le luci fluorescenti, ciò può influire sulle letture del colore del sensore oculare. Prova a spostare la configurazione in uno spazio più luminoso in classe o ad accendere luci aggiuntive per vedere se ciò aiuta il robot a rilevare i colori in modo più accurato.
- Testare il rilevamento del colore utilizzando un altro 123 Robot - I valori "rosso", "verde" e "blu" rilevati dal sensore oculare sono allineati ai valori di tonalità rossa, verde e blu dei 123 Robot. Sostituisci il lupo rosso con un robot 123 rosso ed esegui il progetto. Se il progetto ora funziona come previsto, assicurati che il colore del Lupo sia lo stesso, o una tonalità simile al rosso del Robot 123.
- Prova il rilevamento del colore utilizzando l'app Classroom - Con il robot 123
acceso, apri l'app Classroom, seleziona il robot che stai testando e seleziona "Mostra informazioni
sul dispositivo". Con le informazioni sul dispositivo aperte, il primo sensore che mostra i dati è il
sensore oculare. Il sensore oculare segnala il colore rilevato dal sensore (rosso, blu, verde o N/A) e il
valore della tonalità rilevato in gradi. Posiziona il Robot 123 di fronte al Lupo rosso e guarda quale
colore e valore di tonalità vengono riportati nell'App Classroom.
- Se il colore riportato non è "rosso", sostituire prima il lupo rosso con un robot 123 rosso e vedere se il robot segnala rosso. In tal caso, regola il colore del lupo rosso per adattarlo meglio al robot rosso e utilizza le letture dell'app Classroom per aiutarti in questo processo.
- Puoi anche provare a regolare l'illuminazione ambientale in classe, per vedere se questo aiuta anche le tue letture dei colori a essere più accurate.
- Per ulteriori informazioni, consulta l'articolo Utilizzo dell'app Classroom per la risoluzione dei problemi del robot 123.
- Consultare l'articolo Risoluzione dei problemi dei sensori VEX 123 per ulteriori passaggi e informazioni sulla risoluzione dei problemi.