
![]() Opettajan työkalupakki
-
Tämän toiminnon tarkoitus
Opettajan työkalupakki
-
Tämän toiminnon tarkoitus
Vision Sensor tarjoaa erilaisia tietoja, joita voidaan sitten käyttää projekteissa. Sensing-lohkojen avulla käyttäjä voi saada projektin ottamaan tilannekuvia, päättää onko objekti olemassa, kuinka monta niitä on, määrittää objektin keskipisteen X- ja Y-koordinaatit Vision Sensorin tilannekuvassa ja määrittää objektin leveyden ja korkeuden pikseleinä tilannekuvassa. . Tämä aktiviteetti esittelee kaikki asiaan liittyvät lohkot, joita tarvitaan näiden tietojen keräämiseen Vision Data Challenge -haasteen valmistelussa.
Seuraavassa on pääpiirteet Rethink's Vision Data Challengesta:
-
Tarkista täydellinen tietojoukko näkösensorin tunnistuslohkoista kerätyistä tiedoista.
-
Täydennä näköanturista kerättyjen tietojen osittainen tietojoukko eri tilannekuvasta.
-
Luo tietojoukko tilannekuvan ja Vision Sensorin tunnistuslohkojen perusteella.
Vision Sensorin tunnistuslohkot
VEXcode IQ:ssa on sensorilohkot Vision Sensorille. Kaksi ensimmäistä, joita käytit jo Toista-osiossa ottaaksesi tilannekuvan ja tarkistaaksesi, onko objekti olemassa.
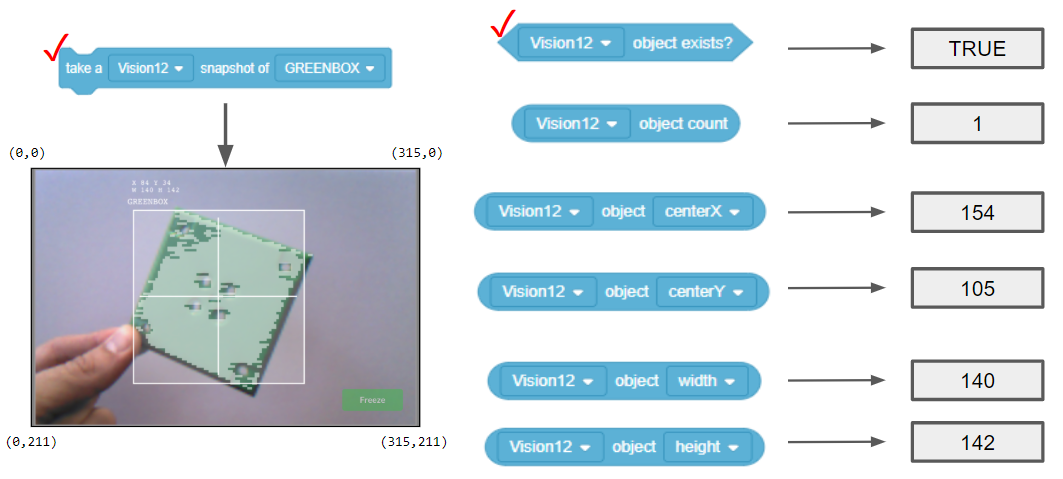
Alla olevasta kuvasta näet, että (Snapshot) -lohko vangitsi GREENBOXin tilannekuvan. Objekti, GREENBOX, tunnistettiin tilannekuvassa, joten vastaus sen olemassaolosta on TOSI.
Katsotaanpa näitä muita Sensing-lohkoja ja mitä niiden arvot kertovat meille.
-
(Object count) -lohko kertoo kuinka monta GREENBOX-objektia tilannekuvassa on. Tässä on vain 1 havaittu.
-
Keskimmäinen X-arvo kertoo, onko GREENBOX-objekti robotin keskipisteen vasemmalla vai oikealla puolella. Muista, että Vision Sensor on asennettu keskelle robotin etuosaa, joten tilannekuva on robotin näkymä.
-
Jos keskipiste X on suurempi kuin 157,5, objekti on robotin keskipisteen oikealla puolella.
-
Jos keskipiste X on pienempi kuin 157,5, kohde on robotin keskipisteen vasemmalla puolella.
-
-
Keskimmäinen Y-arvo kertoo, onko GREENBOX korkeampi vai alempi kuin robotin keskipiste.
-
Jos keskipiste Y on suurempi kuin 105,5, kohde on alempana kuin robotin keskipiste.
-
Jos keskipiste Y on pienempi kuin 105,5, kohde on korkeammalla kuin robotin keskipiste.
-
-
Leveys- ja korkeusarvot kertovat, kuinka lähellä GREENBOX on robottia.
-
Samankokoinen esine kasvaa leveydeltä ja korkeudelta, kun se tulee lähemmäs robottia.
-
![]() Opettajan työkalupakki
-
Miksi tämä lukeminen?
Opettajan työkalupakki
-
Miksi tämä lukeminen?
VEXcode IQ:n ohjetiedot tarjoavat myös tietoa lohkoista, mutta tässä kerättävät tiedot on kontekstualisoitu sen mukaan, mitä ne kertovat käyttäjälle tilannekuvassa olevasta kohteesta.
Huomautuksia:
-
Koko tilannekuvan centerX- ja centerY-arvoja käytetään määrittämään, onko kohde robotin keskipisteen vasemmalla/oikealla vai ylä-/alapuolella. Ne lasketaan jakamalla kyseisen akselin pikselien kokonaismäärä kahdella (esim. tilannekuvan keskipiste X = 315 / 2 = 157,5).
Voimme olettaa, että robotin keskipiste on sama kuin Vision Sensorin tilannekuvan keskipiste, koska Vision Sensor tulee asentaa robotin etupuolen keskelle ja osoittaa eteenpäin. Näköanturin sijainti robotin rakenteessa ja näkösensorin alaspäin kallistuminen on otettava huomioon arvioitaessa kohteen sijaintia robotin (tai näkösensorin) keskipisteen suhteen.
-
Y-arvot kasvavat alaspäin tilannekuvassa. Varmista, että opiskelijat ymmärtävät tämän ennen kuin siirryt seuraavaan osaan.
Miten keskipisteen X ja keskipisteen Y arvot lasketaan?
Arvot lasketaan tilannekuvan koordinaattien perusteella. Kohteen leveys ja korkeus on jo laskettu.
Vision Sensor seuraa X- ja Y-arvoja kohteen vasemmassa yläkulmassa. Alla nämä koordinaatit ovat (84, 34).

Keskipisteen X- ja keskipisteen Y-arvot voidaan laskea vasemman yläkulman koordinaattien (84, 34) sekä annettujen leveys- (L 140) ja korkeus (K 142) arvojen perusteella.

-
keskusX = 140/2 + 84 = 154
-
centerX = puolet objektin leveydestä lisättynä sen vasemman reunan X-koordinaattiin
-
-
keskusta Y = 142/2 + 34 = 105
-
centerY = puolet kohteen korkeudesta lisättynä sen ylimpään Y-koordinaattiin
-
![]() Opettajan työkalupakki
-
Tämän sivun päättäminen
Opettajan työkalupakki
-
Tämän sivun päättäminen
Varmista, että opiskelijat ymmärtävät matematiikan, joka liittyy keskipisteen X- ja Y-arvon löytämiseen. He tarvitsevat sitä seuraavan sivun toimintaan.
Kysy, kuinka arvot (84, 34) ja (L 140, K 142) liittyvät tilannekuvan kulmissa oleviin koordinaatteihin. Opiskelijoiden tulee ymmärtää, että koko tilannekuva on kartoitettu koordinaattitasolle pikselien lukumäärän perusteella. X-arvot vaihtelevat välillä 0 - 315 (316 pikseliä leveä) ja Y-arvot välillä 0 - 211 (212 pikseliä korkea). Objektin koordinaatit ja koko perustuvat siihen, kuinka monta pikseliä objekti ottaa noilta akseleilta.