
Chuẩn bị cho Thử thách Dữ liệu Thị giác
![]() Hộp công cụ dành cho giáo viên
-
Mục đích của hoạt động này
Hộp công cụ dành cho giáo viên
-
Mục đích của hoạt động này
Cảm biến thị giác cung cấp nhiều loại dữ liệu sau đó có thể được sử dụng trong các dự án. Các khối Cảm biến cho phép người dùng chụp nhanh dự án, quyết định xem đối tượng có tồn tại hay không, quyết định có bao nhiêu đối tượng tồn tại, xác định tọa độ trung tâm X và Y của đối tượng trong ảnh chụp nhanh của Cảm biến Tầm nhìn và xác định chiều rộng và chiều cao của đối tượng tính bằng pixel trong ảnh chụp nhanh. Hoạt động này sẽ giới thiệu tất cả các khối liên quan cần thiết để thu thập thông tin đó để chuẩn bị cho Thử thách Dữ liệu Thị giác.
Sau đây là đề cương của Thử thách dữ liệu tầm nhìn của Rethink:
-
Xem lại bộ dữ liệu đầy đủ về thông tin được thu thập từ các khối Cảm biến Thị giác.
-
Hoàn thành một bộ dữ liệu một phần thông tin được thu thập từ Cảm biến Thị giác về một ảnh chụp nhanh khác.
-
Tạo một bộ dữ liệu dựa trên ảnh chụp nhanh và các khối Cảm biến của Cảm biến Tầm nhìn.
Khối cảm biến tầm nhìn
VEXcode IQ có các khối Cảm biến cho Cảm biến Thị giác. Hai cái đầu tiên bạn đã sử dụng trong phần Phát để chụp nhanh và kiểm tra xem đối tượng có tồn tại hay không.
Trong hình dưới đây, bạn thấy rằng khối (Ảnh chụp nhanh) đã chụp ảnh nhanh GREENBOX. Đối tượng, GREENBOX, đã được xác định trong ảnh chụp nhanh và vì vậy câu trả lời liệu nó có tồn tại hay không là ĐÚNG.
Hãy xem xét các khối Cảm biến khác này và những gì giá trị của chúng cho chúng ta biết.
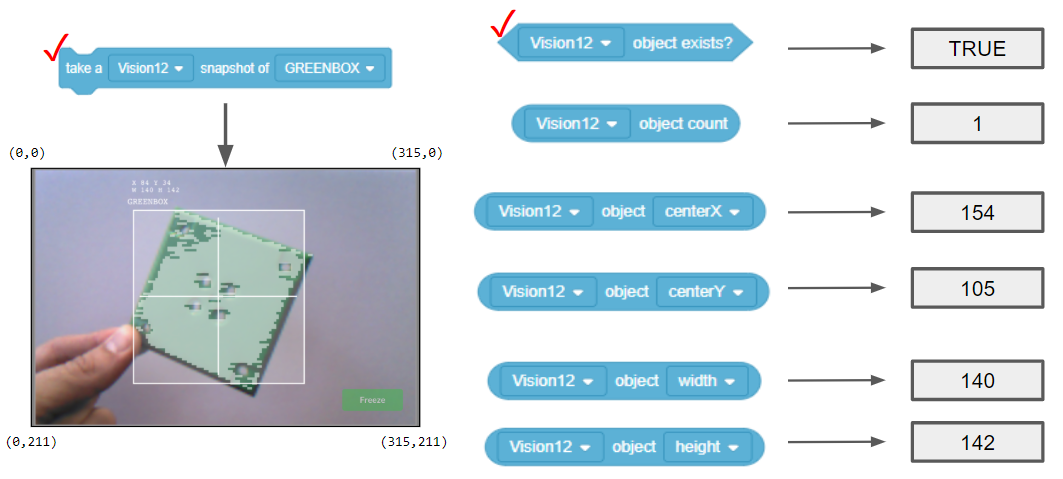
- Khối (Số lượngđối tượng) cho chúng ta biết có bao nhiêu đối tượng GREENBOX trong ảnh chụp nhanh. Ở đây, chỉ có 1 phát hiện.
- Giá trị trung tâm X cho chúng ta biết đối tượng GREENBOX ở bên trái hay bên phải của điểm trung tâm của robot. Hãy nhớ rằng, Cảm biến Tầm nhìn được gắn ở giữa mặt trước của rô bốt và do đó, chế độ xem của ảnh chụp nhanh là chế độ xem của rô bốt.
- Nếu tâm X lớn hơn 157,5, đối tượng nằm ở bên phải điểm trung tâm của rô bốt.
- Nếu tâm X nhỏ hơn 157,5, đối tượng ở bên trái điểm trung tâm của rô bốt.
- Giá trị trung tâm Y cho chúng ta biết GREENBOX cao hơn hay thấp hơn điểm trung tâm của robot.
- Nếu tâm Y lớn hơn 105,5, vật thể sẽ thấp hơn điểm tâm của rô bốt.
- Nếu tâm Y nhỏ hơn 105,5, vật thể sẽ cao hơn điểm tâm của rô bốt.
- Các giá trị chiều rộng và chiều cao cho chúng ta biết GREENBOX gần gũi với robot như thế nào.
- Vật thể có cùng kích thước sẽ có chiều rộng và chiều cao lớn hơn khi đến gần robot hơn.
![]() Hộp công cụ dành cho giáo viên
-
Tại sao bài đọc này?
Hộp công cụ dành cho giáo viên
-
Tại sao bài đọc này?
Thông tin Trợ giúp trong VEXcode IQ cũng cung cấp thông tin về các khối nhưng ở đây, dữ liệu đang được thu thập được bối cảnh hóa theo những gì chúng thông báo cụ thể cho người dùng về đối tượng trong ảnh chụp nhanh.
Ghi chú:
-
Các giá trị centerX và centerY của toàn bộ ảnh chụp nhanh được sử dụng để xác định xem đối tượng ở bên trái/bên phải hay bên trên/bên dưới điểm trung tâm của robot. Chúng được tính bằng cách chia tổng số pixel trên trục đó cho hai (ví dụ: centerX của ảnh chụp nhanh = 315/2 = 157,5).
Chúng ta có thể giả định điểm trung tâm của rô bốt giống như điểm trung tâm của ảnh chụp nhanh của Cảm biến Tầm nhìn vì Cảm biến Tầm nhìn phải được gắn ở trung tâm mặt trước của rô bốt và hướng về phía trước. Vị trí của Cảm biến Tầm nhìn trên bản dựng của rô bốt và mức độ mà Cảm biến Tầm nhìn có thể bị nghiêng xuống cần được tính đến khi đánh giá vị trí của vật thể so với điểm trung tâm của rô bốt (hoặc Cảm biến Tầm nhìn).
-
Các giá trị Y tăng xuống trong ảnh chụp nhanh. Đảm bảo học viên nhận ra điều đó trước khi chuyển sang phần tiếp theo.
Các giá trị trung tâm X và trung tâm Y được tính như thế nào?
Các giá trị được tính toán dựa trên tọa độ trong ảnh chụp nhanh. Chiều rộng và chiều cao của đối tượng đã được tính toán. Cảm biến
Tầm nhìn theo dõi các giá trị X và Y của góc trên bên trái của đối tượng. Dưới đây, các tọa độ đó là (84, 34).

Các giá trị tâm X và tâm Y có thể được tính toán dựa trên tọa độ của góc trên bên trái (84, 34), và các giá trị chiều rộng (W 140) và chiều cao (H 142) được cung cấp.

- centerX = 140/2 + 84 = 154
- centerX = một nửa chiều rộng của đối tượng được thêm vào tọa độ X ngoài cùng bên trái của nó
- centerY = 142/2 + 34 = 105
- centerY = một nửa chiều cao của đối tượng được thêm vào tọa độ Y trên cùng của nó
![]() Hộp công cụ dành cho giáo viên
-
Kết luận trang này
Hộp công cụ dành cho giáo viên
-
Kết luận trang này
Đảm bảo rằng học sinh hiểu toán học liên quan đến việc tìm giá trị trung tâm X và trung tâm Y. Họ sẽ cần nó cho hoạt động trên trang tiếp theo.
Hỏi xem các giá trị (84, 34) và (W 140, H 142) liên quan như thế nào đến tọa độ được cung cấp ở các góc của ảnh chụp nhanh. Học sinh nên nhận ra rằng toàn bộ ảnh chụp nhanh được ánh xạ lên một mặt phẳng tọa độ dựa trên số lượng pixel. Các giá trị X nằm trong khoảng từ 0 đến 315 (rộng 316 pixel) và các giá trị Y nằm trong khoảng từ 0 đến 211 (cao 212 pixel). Tọa độ và kích thước của đối tượng dựa trên số lượng pixel mà đối tượng chiếm giữ dọc theo các trục đó.