
Prepare-se para o Desafio de Dados de Visão
![]() Caixa de Ferramentas do Professor
-
O Propósito desta Atividade
Caixa de Ferramentas do Professor
-
O Propósito desta Atividade
O Sensor de Visão fornece uma variedade de dados que podem ser usados em projetos. Os blocos de detecção permitem que o usuário faça com que o projeto tire instantâneos, decida se o objeto existe, decida quantos existem, determine as coordenadas X e Y do centro do objeto dentro do instantâneo do Sensor de Visão e determine a largura e a altura do objeto em pixels dentro do instantâneo. Esta atividade apresentará todos os blocos relacionados necessários para coletar essas informações em preparação para o Desafio de Dados de Visão.
O seguinte é um esboço do Desafio de Dados de Visão da Rethink:
-
Revise um conjunto completo de dados de informações coletadas dos blocos de detecção do sensor de visão.
-
Preencha um conjunto de dados parcial de informações coletadas do Sensor de Visão sobre um instantâneo diferente.
-
Crie um conjunto de dados com base em um instantâneo e nos blocos de detecção do sensor de visão.
Blocos de detecção do sensor de visão
O VEXcode IQ possui blocos de detecção para o sensor de visão. Os dois primeiros você já usou na seção Reproduzir para tirar um instantâneo e verificar se o objeto existe.
Na figura abaixo, você vê que o bloco (Snapshot) capturou o snapshot do GREENBOX. O objeto, GREENBOX, foi identificado no instantâneo e, portanto, a resposta de se ele existe é VERDADEIRA.
Vejamos esses outros blocos de Sensoriamento e o que os valores deles nos dizem.
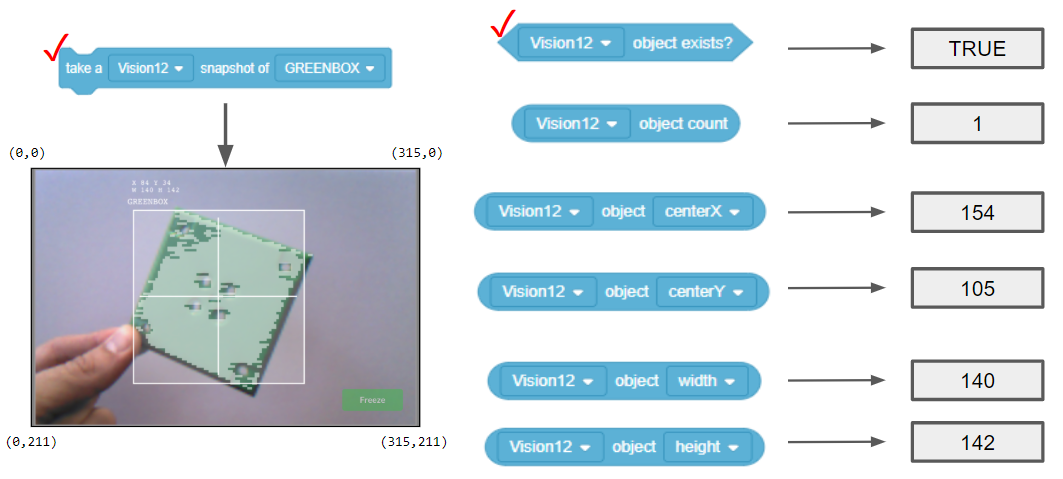
- O bloco (Object count) nos informa quantos objetos GREENBOX estão no snapshot. Aqui, há apenas 1 detectado.
- O valor X central nos diz se o objeto GREENBOX está à esquerda ou à direita do ponto central do robô. Lembre-se, o Sensor de Visão é montado no meio da frente do robô e, portanto, a visão do instantâneo é a visão do robô.
- Se o centro X for maior que 157,5, o objeto está à direita do ponto central do robô.
- Se o centro X for inferior a 157,5, o objeto está à esquerda do ponto central do robô.
- O valor Y central nos diz se o GREENBOX é maior ou menor do que o ponto central do robô.
- Se o centro Y for maior que 105,5, o objeto é inferior ao ponto central do robô.
- Se o centro Y for inferior a 105,5, o objeto é superior ao ponto central do robô.
- Os valores de largura e altura nos dizem o quão perto o GREENBOX está do robô.
- O objeto do mesmo tamanho será maior em largura e altura à medida que se aproxima do robô.
![]() Caixa de Ferramentas do Professor
-
Por que esta leitura?
Caixa de Ferramentas do Professor
-
Por que esta leitura?
As informações de Ajuda dentro do VEXcode IQ também fornecem informações sobre os blocos, mas aqui, os dados que estão sendo coletados são contextualizados quanto ao que eles dizem especificamente ao usuário sobre o objeto no instantâneo.
Observações:
-
Os valores centerX e centerY de todo o instantâneo são usados para determinar se o objeto está à esquerda/direita ou acima/abaixo do ponto central do robô. Eles são calculados dividindo o número total de pixels nesse eixo por dois (por exemplo, centerX de snapshot = 315/2 = 157,5).
Podemos supor que o ponto central do robô é o mesmo que o ponto central do instantâneo do Sensor de Visão porque o Sensor de Visão deve ser montado no centro da parte frontal do robô e voltado para a frente. A posição do Sensor de Visão na construção do robô e o grau em que o Sensor de Visão pode ser inclinado para baixo precisam ser levados em consideração ao julgar a posição do objeto em relação ao ponto central do robô (ou do Sensor de Visão).
-
Os valores Y aumentam para baixo dentro do instantâneo. Certifique-se de que os alunos reconheçam isso antes de passar para a próxima parte.
Como são calculados os valores do centro X e do centro Y?
Os valores são calculados com base nas coordenadas dentro do instantâneo. A largura e a altura do objeto já foram calculadas.
O Sensor de Visão rastreia os valores X e Y do canto superior esquerdo do objeto. Abaixo, essas coordenadas são (84, 34).

Os valores de centro X e centro Y podem ser calculados com base nas coordenadas do canto superior esquerdo (84, 34) e os valores de largura (W 140) e altura (H 142) fornecidos.

- centerX = 140/2 + 84 = 154
- centerX = metade da largura do objeto adicionado à sua coordenada X mais à esquerda
- centerY = 142/2 + 34 = 105
- centerY = metade da altura do objeto adicionado à sua coordenada Y mais alta
![]() Caixa de Ferramentas do Professor
-
Concluindo esta página
Caixa de Ferramentas do Professor
-
Concluindo esta página
Certifique-se de que os alunos entendam a matemática envolvida na localização dos valores do centro X e do centro Y. Eles precisarão dele para a atividade na próxima página.
Pergunte como os valores (84, 34) e (W 140, H 142) se relacionam com as coordenadas fornecidas nos cantos do instantâneo. Os alunos devem reconhecer que todo o instantâneo é mapeado em um plano de coordenadas com base no número de pixels. Os valores X variam de 0 a 315 (316 pixels de largura) e os valores Y variam de 0 a 211 (212 pixels de altura). As coordenadas e o tamanho do objeto são baseados em quantos pixels o objeto ocupa ao longo desses eixos.