
Bereiten Sie sich auf die Vision Data Challenge vor
![]() Lehrer-Toolbox
-
Der Zweck dieser Aktivität
Lehrer-Toolbox
-
Der Zweck dieser Aktivität
Der Vision Sensor liefert eine Vielzahl von Daten, die dann in Projekten verwendet werden können. Die Erfassungsblöcke ermöglichen es dem Benutzer, das Projekt Schnappschüsse machen zu lassen, zu entscheiden, ob das Objekt vorhanden ist, zu entscheiden, wie viele vorhanden sind, die X- und Y-Koordinaten des Objektzentrums innerhalb des Schnappschusses des Bildsensors zu bestimmen und die Breite und Höhe des Objekts in Pixeln innerhalb des Schnappschusses zu bestimmen. In dieser Aktivität werden alle zugehörigen Blöcke vorgestellt, die zum Sammeln dieser Informationen in Vorbereitung auf die Vision Data Challenge erforderlich sind.
Im Folgenden finden Sie einen Überblick über die Vision Data Challenge von Rethink:
-
Überprüfen Sie einen vollständigen Datensatz der Informationen, die von den Sensing-Blöcken des Vision-Sensors gesammelt wurden.
-
Vervollständigen Sie einen Teildatensatz mit Informationen, die vom Vision-Sensor über einen anderen Schnappschuss gesammelt wurden.
-
Erstellen Sie einen Datensatz basierend auf einem Snapshot und den Sensing-Blöcken des Vision Sensors.
Die Erfassungsblöcke des Vision-Sensors
VEXcode IQ verfügt über Sensing-Blöcke für den Vision-Sensor. Die ersten beiden, die Sie bereits im Abschnitt Wiedergabe verwendet haben, um einen Schnappschuss zu erstellen und zu überprüfen, ob das Objekt vorhanden ist.
In der folgenden Abbildung sehen Sie, dass der (Snapshot-) Block den GREENBOX-Snapshot erfasst hat. Das Objekt GREENBOX wurde in der Momentaufnahme identifiziert, so dass die Antwort darauf, ob es existiert, WAHR ist.
Schauen wir uns diese anderen Sensing-Blöcke an und was ihre Werte uns sagen.
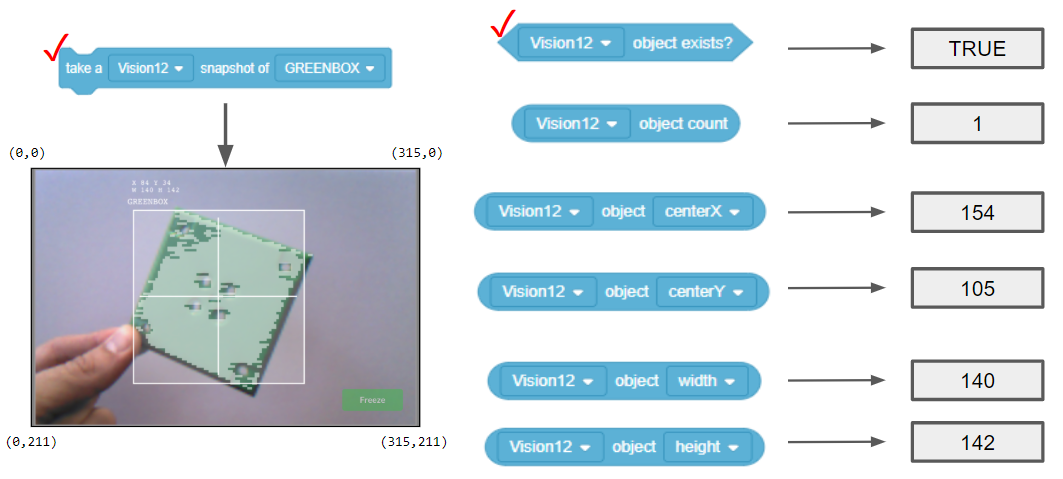
- Der Block (Object count) teilt uns mit, wie viele GREENBOX-Objekte sich im Snapshot befinden. Hier wird nur 1 erkannt.
- Der mittlere X-Wert sagt uns, ob sich das GREENBOX-Objekt links oder rechts vom Mittelpunkt des Roboters befindet. Denken Sie daran, dass der Vision-Sensor in der Mitte der Vorderseite des Roboters montiert ist, sodass die Ansicht des Schnappschusses die Ansicht des Roboters ist.
- Wenn das Zentrum X größer als 157,5 ist, befindet sich das Objekt rechts vom Mittelpunkt des Roboters.
- Wenn das Zentrum X kleiner als 157,5 ist, befindet sich das Objekt links vom Mittelpunkt des Roboters.
- Der mittlere Y-Wert sagt uns, ob die GREENBOX höher oder niedriger als der Mittelpunkt des Roboters ist.
- Wenn das Zentrum Y größer als 105,5 ist, liegt das Objekt niedriger als der Mittelpunkt des Roboters.
- Wenn das Zentrum Y kleiner als 105,5 ist, ist das Objekt höher als der Mittelpunkt des Roboters.
- Die Werte für Breite und Höhe sagen uns, wie nah die GREENBOX am Roboter ist.
- Das gleich große Objekt wird in Breite und Höhe größer, wenn es sich dem Roboter nähert.
![]() Lehrer-Toolbox
-
Warum diese Lesung?
Lehrer-Toolbox
-
Warum diese Lesung?
Die Hilfe-Informationen in VEXcode IQ liefern auch Informationen über die Blöcke, aber hier werden die gesammelten Daten kontextualisiert, was sie dem Benutzer spezifisch über das Objekt im Snapshot sagen.
Anmerkungen:
-
Die centerX- und centerY-Werte des gesamten Snapshots werden verwendet, um zu bestimmen, ob sich das Objekt links/rechts oder über/unter dem Mittelpunkt des Roboters befindet. Sie werden berechnet, indem die Gesamtzahl der Pixel auf dieser Achse durch zwei geteilt wird (z. B. centerX von Snapshot = 315/2 = 157,5).
Wir können davon ausgehen, dass der Mittelpunkt des Roboters derselbe ist wie der Mittelpunkt der Momentaufnahme des Vision-Sensors, da der Vision-Sensor in der Mitte der Vorderseite des Roboters und nach vorne gerichtet montiert werden sollte. Die Position des Vision-Sensors am Aufbau des Roboters und der Grad, in dem der Vision-Sensor nach unten geneigt sein könnte, müssen bei der Beurteilung der Position des Objekts relativ zum Mittelpunkt des Roboters (oder Vision-Sensors) berücksichtigt werden.
-
Die Y-Werte steigen innerhalb des Snapshots nach unten. Stellen Sie sicher, dass die Schüler das erkennen, bevor Sie mit dem nächsten Teil fortfahren.
Wie werden die Mitten-X- und Mitten-Y-Werte berechnet?
Die Werte werden basierend auf den Koordinaten innerhalb des Snapshots berechnet. Die Breite und Höhe des Objekts sind bereits berechnet.
Der Vision Sensor verfolgt die X- und Y-Werte der oberen linken Ecke des Objekts. Unten sind diese Koordinaten (84, 34).

Die Mitten-X- und Mitten-Y-Werte können auf Grundlage der Koordinaten der oberen linken Ecke (84, 34) und der bereitgestellten Werte für Breite (W 140) und Höhe (H 142) berechnet werden.

- centerX = 140/2 + 84 = 154
- centerX = die halbe Breite des Objekts, das zu seiner ganz linken X-Koordinate hinzugefügt wurde
- centerY = 142/2 + 34 = 105
- centerY = die Hälfte der Höhe des Objekts, das zu seiner obersten Y-Koordinate hinzugefügt wurde
![]() Lehrer-Toolbox
-
Abschluss dieser Seite
Lehrer-Toolbox
-
Abschluss dieser Seite
Stellen Sie sicher, dass die Schüler die Mathematik verstehen, die bei der Suche nach den Werten für das Zentrum X und das Zentrum Y eine Rolle spielt. Sie benötigen es für die Aktivität auf der nächsten Seite.
Fragen Sie, wie sich die Werte (84, 34) und (W 140, H 142) auf die Koordinaten beziehen, die in den Ecken des Schnappschusses bereitgestellt werden. Die Schüler sollten erkennen, dass der gesamte Schnappschuss basierend auf der Anzahl der Pixel auf einer Koordinatenebene abgebildet wird. Die X-Werte reichen von 0 bis 315 (316 Pixel breit) und die Y-Werte von 0 bis 211 (212 Pixel hoch). Die Koordinaten und die Größe des Objekts basieren darauf, wie viele Pixel das Objekt entlang dieser Achsen einnimmt.