
비전 데이터 챌린지에 대비
![]() 교사 도구 상자
-
이 활동의 목적
교사 도구 상자
-
이 활동의 목적
비전 센서는 프로젝트에서 사용할 수 있는 다양한 데이터를 제공합니다. 감지 블록을 사용하면 프로젝트가 스냅샷을 찍고, 개체가 존재하는지 여부를 결정하고, 존재하는 개수를 결정하고, 비전 센서의 스냅샷 내에서 개체의 중심 X 및 Y 좌표를 결정하고, 스냅샷 내에서 개체의 너비와 높이를 픽셀 단위로 결정할 수 있습니다. 이 활동은 비전 데이터 챌린지에 대비하여 해당 정보를 수집하는 데 필요한 모든 관련 블록을 소개합니다.
다음은 Rethink의 비전 데이터 챌린지의 개요입니다.
-
비전 센서의 감지 블록에서 수집된 전체 데이터 세트를 검토하십시오.
-
다른 스냅샷에 대해 비전 센서에서 수집한 정보의 부분 데이터 세트를 작성하십시오.
-
스냅샷과 비전 센서의 감지 블록을 기반으로 데이터 세트를 만듭니다.
비전 센서의 감지 블록
VEXcode IQ에는 비전 센서용 감지 블록이 있습니다. 재생 섹션에서 이미 사용한 처음 두 개는 스냅샷을 찍고 개체가 있는지 확인하는 데 사용됩니다. 아래
그림에서 (Snapshot) 블록이 GREENBOX 스냅샷을 캡처한 것을 볼 수 있습니다. 개체 GREENBOX는 스냅샷에서 식별되었으므로 존재 여부에 대한 답은 true입니다. 이 다른 감지 블록과 그 값이 우리에게 말하는 것을
살펴보겠습니다.
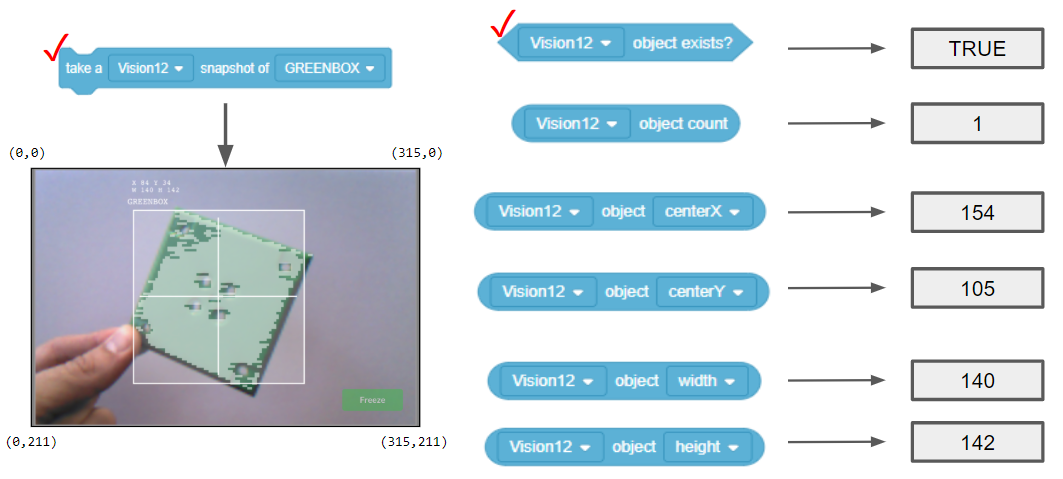
- (개체 수) 블록은 스냅샷에 있는 GREENBOX 개체의 수를 알려줍니다. 여기서 1개만 감지되었습니다.
- 중앙 X 값은 GREENBOX 개체가 로봇의 중심점의 왼쪽 또는 오른쪽에 있는지 여부를 알려줍니다. 비전 센서는 로봇의 전면 중앙에 장착되므로 스냅샷의 시야는 로봇의 시야입니다.
- 중심 X가 157.5보다 크면 개체는 로봇의 중심점 오른쪽에 있습니다.
- 중심 X가 157.5보다 작으면 물체는 로봇의 중심점 왼쪽에 있습니다.
- 중앙 Y 값은 GREENBOX가 로봇의 중심점보다 높은지 낮은지를 알려줍니다.
- 중심 Y가 105.5보다 크면 물체는 로봇의 중심점보다 낮습니다.
- 중심 Y가 105.5보다 작으면 물체가 로봇의 중심점보다 높습니다.
- 너비와 높이 값은 GREENBOX가 로봇에 얼마나 가까이 있는지 알려줍니다.
- 같은 크기의 물체는 로봇에 가까워질수록 너비와 높이가 커집니다.
![]() 교사 도구 상자
- 이 글을 읽는
이유?
교사 도구 상자
- 이 글을 읽는
이유?
VEXcode IQ 내의 도움말 정보는 블록에 대한 정보도 제공하지만 여기에서 수집되는 데이터는 스냅샷의 개체에 대해 사용자에게 구체적으로 알려주는 내용에 대해 컨텍스트화됩니다.
참고:
-
전체 스냅샷의 centerX 및 centerY 값은 개체가 로봇의 중심점 왼쪽/오른쪽 또는 위/아래에 있는지 여부를 결정하는 데 사용됩니다. 해당 축의 총 픽셀 수를 2로 나누어 계산합니다 (예: 스냅샷의 centerX = 315/2 = 157.5).
로봇의 중심점이 비전 센서의 스냅샷의 중심점과 동일하다고 가정할 수 있습니다. 왜냐하면 비전 센서는 로봇의 전면 중앙에 장착되고 정면을 향해야 하기 때문입니다. 로봇의 빌드에서 비전 센서의 위치와 비전 센서가 아래로 향할 수 있는 정도는 로봇의 (또는 비전 센서의) 중심점에 대한 물체의 위치를 판단할 때 고려해야 합니다.
-
Y 값은 스냅샷 내에서 아래쪽으로 증가합니다. 다음 부분으로 넘어가기 전에 학생들이 이를 인식하도록 한다.
중심 X 및 중심 Y 값은 어떻게 계산됩니까?
값은 스냅샷 내의 좌표를 기반으로 계산됩니다. 개체의 너비와 높이가 이미 계산되었습니다. 비전
센서는 물체의 왼쪽 상단 모서리의 X 및 Y 값을 추적합니다. 아래에서 해당 좌표는 (84, 34) 입니다.

중앙 X 및 중앙 Y 값들은 제공된 폭 (W 140) 및 높이 (H 142) 값들, 및 좌측 상단 코너 (84, 34) 의 좌표들에 기초하여 계산될 수 있다.

- centerX = 140/2 + 84 = 154
- centerX = 가장 왼쪽 X 좌표에 추가된 개체의 너비의 절반
- centerY = 142/2 + 34 = 105
- centerY = 최상위 Y 좌표에 추가된 물체의 높이의 절반
![]() 교사 도구 상자
- 이 페이지
마무리
교사 도구 상자
- 이 페이지
마무리
학생들이 중심 X와 중심 Y 값을 찾는 데 관련된 수학을 이해하도록 한다. 다음 페이지의 활동에 필요합니다.
(84, 34) 및 (W 140, H 142) 값이 스냅샷의 모서리에 제공된 좌표와 어떻게 관련되는지 물어보십시오. 학생들은 전체 스냅샷이 픽셀 수에 따라 좌표평면에 매핑된다는 것을 인식해야 합니다. X 값은 0 ~ 315 (너비 316픽셀) 이고 Y 값은 0 ~ 211 (높이 212픽셀) 입니다. 개체의 좌표와 크기는 개체가 해당 축을 따라 차지하는 픽셀 수를 기반으로 합니다.