
![]() Tanári eszköztár
-
A tevékenység célja
Tanári eszköztár
-
A tevékenység célja
A Vision Sensor számos adatot biztosít, amelyeket aztán projektekben lehet felhasználni. Az érzékelő blokkok lehetővé teszik a felhasználó számára, hogy a projekt készítsen pillanatfelvételeket, eldöntse, hogy létezik-e az objektum, hány darab létezik, meghatározhatja az objektum középpontjának X és Y koordinátáit a Vision Sensor pillanatképen belül, és meghatározhatja az objektum szélességét és magasságát pixelben a pillanatfelvételen belül. . Ez a tevékenység bemutatja az összes kapcsolódó blokkot, amelyek az információk összegyűjtéséhez szükségesek a Vision Data Challenge előkészítése során.
Az alábbiakban a Rethink Vision Data Challenge programjának vázlata látható:
-
Tekintse át a Vision Sensor Sensing blokkjaiból gyűjtött információ teljes adatkészletét.
-
Töltse ki a Vision Sensor által gyűjtött információk egy részleges adatkészletét egy másik pillanatfelvételről.
-
Hozzon létre egy adatkészletet egy pillanatfelvétel és a Vision Sensor érzékelő blokkjai alapján.
A Vision Sensor érzékelő blokkjai
A VEXcode IQ érzékelő blokkokkal rendelkezik a Vision Sensor számára. Az első kettő, amelyet már használt a Lejátszás szakaszban pillanatfelvétel készítéséhez és az objektum létezésének ellenőrzéséhez.
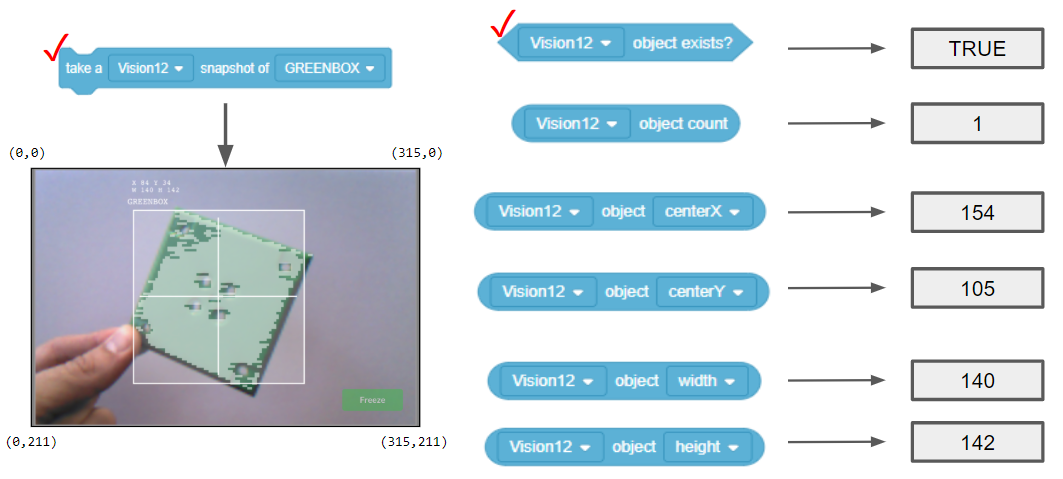
Az alábbi ábrán látható, hogy a (Snapshot) blokk rögzítette a GREENBOX pillanatképet. A GREENBOX objektumot azonosították a pillanatképen, így a válasz arra, hogy létezik-e, IGAZ.
Nézzük meg ezeket a többi érzékelő blokkot, és mit árulnak el értékeik.
-
A (Object count) blokk megmondja, hogy hány GREENBOX objektum van a pillanatképen. Itt csak 1 észlelt.
-
A középső X érték megmondja, hogy a GREENBOX objektum a robot középpontjától balra vagy jobbra van-e. Ne feledje, hogy a Vision Sensor a robot elejének közepére van felszerelve, így a pillanatfelvétel a robot nézete lesz.
-
Ha az X középpont nagyobb, mint 157,5, akkor az objektum a robot középpontjától jobbra van.
-
Ha X középpontja kisebb, mint 157,5, akkor az objektum a robot középpontjától balra van.
-
-
A középső Y érték megmondja, hogy a GREENBOX magasabb vagy alacsonyabb, mint a robot középpontja.
-
Ha Y középpont nagyobb, mint 105,5, akkor az objektum alacsonyabban van, mint a robot középpontja.
-
Ha Y középpontja kisebb, mint 105,5, az objektum magasabban van, mint a robot középpontja.
-
-
A szélesség és magasság értékekből kiderül, milyen közel van a GREENBOX a robothoz.
-
Az azonos méretű objektum szélessége és magassága nagyobb lesz, ahogy közelebb kerül a robothoz.
-
![]() Tanári eszköztár
-
Miért ez az olvasmány?
Tanári eszköztár
-
Miért ez az olvasmány?
A VEXcode IQ-n belüli súgó információ a blokkokról is nyújt információt, de itt az összegyűjtött adatok kontextusba kerülnek, hogy konkrétan mit mondanak el a felhasználónak a pillanatképen lévő objektumról.
Megjegyzések:
-
A teljes pillanatfelvétel centerX és centerY értékeit használják annak meghatározására, hogy az objektum balra/jobbra vagy a robot középpontja felett/alatt van-e. Kiszámításuk úgy történik, hogy az adott tengelyen lévő összes pixel számát elosztjuk kettővel (pl. a pillanatfelvétel középpontja X = 315 / 2 = 157,5).
Feltételezhetjük, hogy a robot középpontja megegyezik a Vision Sensor pillanatfelvételének középpontjával, mert a Vision Sensort a robot elülső oldalának közepére kell felszerelni, és előre nézni. A látóérzékelő helyzetét a robot felépítésén és a látóérzékelő lefelé dőlésének mértékét figyelembe kell venni az objektumnak a robot (vagy a látásérzékelő) középpontjához viszonyított helyzetének megítélésekor.
-
Az Y értékek lefelé nőnek a pillanatképen belül. Győződjön meg arról, hogy a tanulók felismerik ezt, mielőtt a következő részre lépnének.
Hogyan számítják ki a középső X és középső Y értékeket?
Az értékek kiszámítása a pillanatfelvételen belüli koordináták alapján történik. Az objektum szélessége és magassága már ki van számítva.
A Vision Sensor követi az X és Y értékeket az objektum bal felső sarkában. Az alábbiakban ezek a koordináták (84, 34).

A középső X és középső Y értékek a bal felső sarok koordinátái (84, 34), valamint a megadott szélesség (W 140) és magasság (H 142) alapján számíthatók ki.

-
centerX = 140/2 + 84 = 154
-
centerX = az objektum bal szélső X koordinátájához hozzáadott szélességének fele
-
-
center Y = 142/2 + 34 = 105
-
centerY = az objektum magasságának fele hozzáadva a legfelső Y koordinátához
-
![]() Tanári eszköztár
-
Az oldal befejezése
Tanári eszköztár
-
Az oldal befejezése
Győződjön meg arról, hogy a tanulók értik a középponti X és középső Y értékek megtalálásához szükséges matematikát. Szükségük lesz rá a következő oldalon található tevékenységhez.
Kérdezd meg, hogyan viszonyulnak a (84, 34) és (W 140, H 142) értékek a pillanatfelvétel sarkaiban megadott koordinátákhoz. A tanulóknak fel kell ismerniük, hogy a teljes pillanatfelvétel egy koordinátasíkra van leképezve a pixelek száma alapján. Az X értékek 0 és 315 (316 pixel széles), az Y értékek 0 és 211 (212 képpont magas) között vannak. Az objektum koordinátái és mérete azon alapul, hogy az objektum hány pixelt foglal el a tengelyek mentén.