
Preparati per la Vision Data Challenge
![]() Teacher Toolbox
-
Lo scopo di questa attività
Teacher Toolbox
-
Lo scopo di questa attività
Il sensore di visione fornisce una varietà di dati che possono essere utilizzati nei
progetti. I blocchi di rilevamento consentono all'utente di fare in modo che il progetto
scatti istantanee, decida se l'oggetto esiste, decida quanti ne esistono, determini le
coordinate X e Y centrali dell'oggetto all'interno dell'istantanea del sensore di
visione e determini la larghezza e l'altezza dell'oggetto in pixel all'interno
dell'istantanea. Questa attività introdurrà tutti i relativi blocchi necessari per
raccogliere tali informazioni in preparazione alla Vision Data Challenge.
Di seguito è riportato uno schema della Vision Data Challenge di Rethink:
-
Esaminare un set completo di dati di informazioni raccolte dai blocchi di rilevamento del sensore di visione.
-
Completare un set di dati parziali di informazioni raccolte dal sensore di visione su un'istantanea diversa.
-
Crea un set di dati basato su un'istantanea e sui blocchi di rilevamento del sensore di visione.
I blocchi di rilevamento del sensore di visione
VEXcode IQ dispone di blocchi di rilevamento per il sensore di visione. Le prime due che
hai già utilizzato nella sezione Play per scattare un'istantanea e per verificare se
l'oggetto esiste.
Nella figura seguente, si vede che il blocco (Istantanea)
ha catturato l'istantanea GREENBOX. L'oggetto, GREENBOX, è stato identificato
nell'istantanea e quindi la risposta se esiste è VERA.
Diamo un'occhiata a questi
altri blocchi di Sensing e a cosa ci dicono i loro valori.
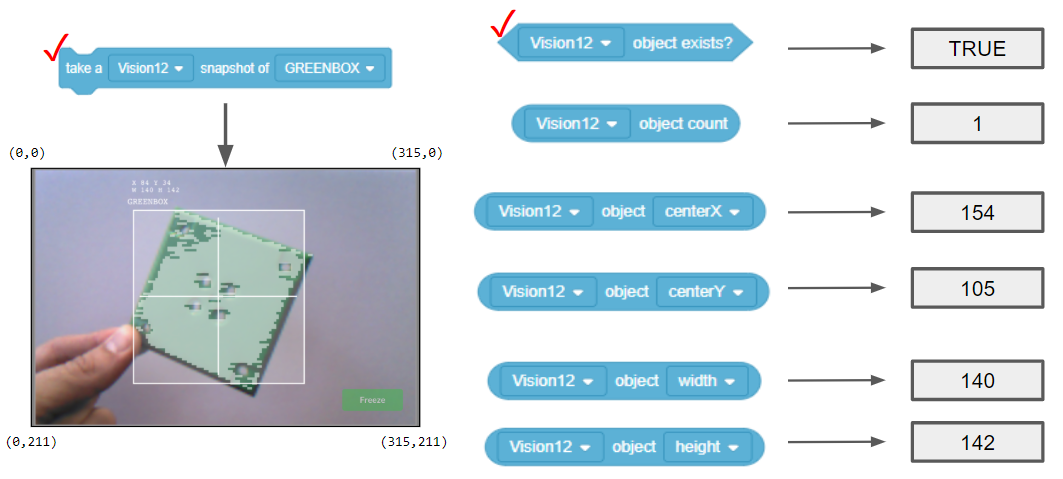
- Il blocco (Conteggiooggetti) ci dice quanti oggetti GREENBOX sono nell'istantanea. Qui, ne è stato rilevato solo 1.
- Il valore X centrale ci dice se l'oggetto GREENBOX si trova a sinistra o a destra
del punto centrale del robot. Ricorda, il sensore di visione è montato al centro
della parte anteriore del robot e quindi la vista dell'istantanea è la vista del
robot.
- Se il centro X è maggiore di 157,5, l'oggetto si trova a destra del punto centrale del robot.
- Se il centro X è inferiore a 157,5, l'oggetto si trova a sinistra del punto centrale del robot.
- Il valore Y centrale ci dice se il GREENBOX è superiore o inferiore al punto
centrale del robot.
- Se il centro Y è maggiore di 105,5, l'oggetto è più basso del punto centrale del robot.
- Se il centro Y è inferiore a 105,5, l'oggetto è più alto del punto centrale del robot.
- I valori di larghezza e altezza ci dicono quanto è vicino il GREENBOX al robot.
- L'oggetto delle stesse dimensioni sarà più grande in larghezza e altezza man mano che si avvicina al robot.
![]() Teacher Toolbox
-
Perché questa lettura?
Teacher Toolbox
-
Perché questa lettura?
Le informazioni della Guida all'interno di VEXcode IQ forniscono anche informazioni sui blocchi, ma qui i dati raccolti sono contestualizzati in base a ciò che dicono specificamente all'utente sull'oggetto nell'istantanea.
Note:
-
I valori centerX e centerY dell'intera istantanea vengono utilizzati per determinare se l'oggetto si trova a sinistra/destra o sopra/sotto il punto centrale del robot. Sono calcolati dividendo il numero totale di pixel su quell' asse per due (ad esempio, centroX dell'istantanea = 315 / 2 = 157,5).
Possiamo supporre che il punto centrale del robot sia lo stesso del punto centrale dell'istantanea del sensore di visione perché il sensore di visione deve essere montato al centro del lato anteriore del robot e rivolto in avanti. La posizione del sensore di visione sulla costruzione del robot e il grado in cui il sensore di visione potrebbe essere inclinato verso il basso devono essere presi in considerazione quando si giudica la posizione dell'oggetto rispetto al punto centrale del robot (o del sensore di visione).
-
I valori Y aumentano verso il basso all'interno dell'istantanea. Assicurati che gli studenti lo riconoscano prima di passare alla parte successiva.
Come vengono calcolati i valori di centro X e centro Y?
I valori sono calcolati in base alle coordinate all'interno dell'istantanea. La larghezza
e l'altezza dell'oggetto sono già calcolate.
Il sensore di visione tiene traccia
dei valori X e Y dell'angolo in alto a sinistra dell'oggetto. Sotto, quelle coordinate
sono (84, 34).

I valori di centro X e centro Y possono essere calcolati in base alle coordinate dell'angolo in alto a sinistra (84, 34) e ai valori di larghezza (W 140) e altezza (H 142) forniti.

- centroX = 140/2 + 84 = 154
- centerX = metà della larghezza dell'oggetto aggiunto alla sua coordinata X più a sinistra
- centroY = 142/2 + 34 = 105
- centroY = metà dell'altezza dell'oggetto aggiunta alla sua coordinata Y più in alto
![]() Teacher Toolbox
-
Conclusione di questa pagina
Teacher Toolbox
-
Conclusione di questa pagina
Assicurati che gli studenti comprendano i calcoli matematici necessari per trovare i valori X e Y del centro. Ne avranno bisogno per l'attività nella pagina successiva.
Chiedere in che modo i valori (84, 34) e (W 140, H 142) si riferiscono alle coordinate fornite negli angoli dell'istantanea. Gli studenti dovrebbero riconoscere che l'intera istantanea è mappata su un piano di coordinate in base al numero di pixel. I valori X vanno da 0 a 315 (316 pixel di larghezza) e i valori Y vanno da 0 a 211 (212 pixel di altezza). Le coordinate e le dimensioni dell'oggetto si basano su quanti pixel l'oggetto occupa lungo quegli assi.