
अब जबकि आपने यह जान लिया है कि कोणीय पैरामीटर बदलने से आपकी कोडिंग परियोजनाओं में किस प्रकार सुधार हो सकता है, तो आप अपने रोबोट को बैरल के एक सेट के चारों ओर यथाशीघ्र नेविगेट करने के लिए कोड करके इस ज्ञान को और बढ़ाएंगे। आप अपने रोबोट की गति की सटीकता और गति दोनों को बेहतर बनाने के लिए कोणों को समायोजित करने पर ध्यान केंद्रित करेंगे।
इसके बारे में जानने के लिए नीचे दिया गया वीडियो देखें:
- परिशुद्धता के लिए छोटे कोण समायोजन का उपयोग करना।
- रोबोट से अलग-अलग दूरी पर स्थित बाधाओं के आसपास नेविगेट करने के लिए कोण समायोजित करना
अब जब आपने वीडियो देख लिया है, तो अपने विचारों को अपनी डायरी में लिख लें। अपनी सोच को दिशा देने और पूरी कक्षा में चर्चा के लिए तैयार होने में मदद के लिए इन प्रश्नों के उत्तर दें:
- रोबोट से वस्तुओं की दूरी के आधार पर कोण और दूरी के पैरामीटर किस प्रकार भिन्न होते हैं, इस बारे में अपने कम से कम दो प्रश्न लिखें।
- परिशुद्धता के लिए आप छोटे कोण समायोजन का उपयोग कैसे करेंगे?
- वीडियो में आपने ऐसा क्या देखा जो आपकी सोच का समर्थन करता है?
- कोडिंग या VEXcode के बारे में आपने क्या सीखा है जो इस पाठ में आपकी मदद करेगा?
अब जब आपने वीडियो देख लिया है, तो अपने विचारों को अपनी डायरी में लिख लें। अपनी सोच को दिशा देने और पूरी कक्षा में चर्चा के लिए तैयार होने में मदद के लिए इन प्रश्नों के उत्तर दें:
- रोबोट से वस्तुओं की दूरी के आधार पर कोण और दूरी के पैरामीटर किस प्रकार भिन्न होते हैं, इस बारे में अपने कम से कम दो प्रश्न लिखें।
- परिशुद्धता के लिए आप छोटे कोण समायोजन का उपयोग कैसे करेंगे?
- वीडियो में आपने ऐसा क्या देखा जो आपकी सोच का समर्थन करता है?
- कोडिंग या VEXcode के बारे में आपने क्या सीखा है जो इस पाठ में आपकी मदद करेगा?
वीडियो देखने के बाद और अभ्यास से पहले, छात्र एक साथ मिलकर पूरी कक्षा में चर्चा करते हैं चर्चा के आधार के रूप में दिए गए प्रश्नों के छात्रों के उत्तरों का उपयोग करें।
बोर्ड पर छात्रों के योगदान को नोट करें ताकि हर कोई एक दूसरे के विचारों को देख सके और उन पर काम कर सके। उन्हें अपने विचारों को स्पष्टता से व्यक्त करने में मदद के लिए अपनी डायरी या वीडियो के दृश्यों को देखने की याद दिलाएं
निर्देशित अभ्यास
अब जब आपने वीडियो देख लिया है और उस पर चर्चा कर ली है, तो अब अभ्यास करने की बारी आपकी है!
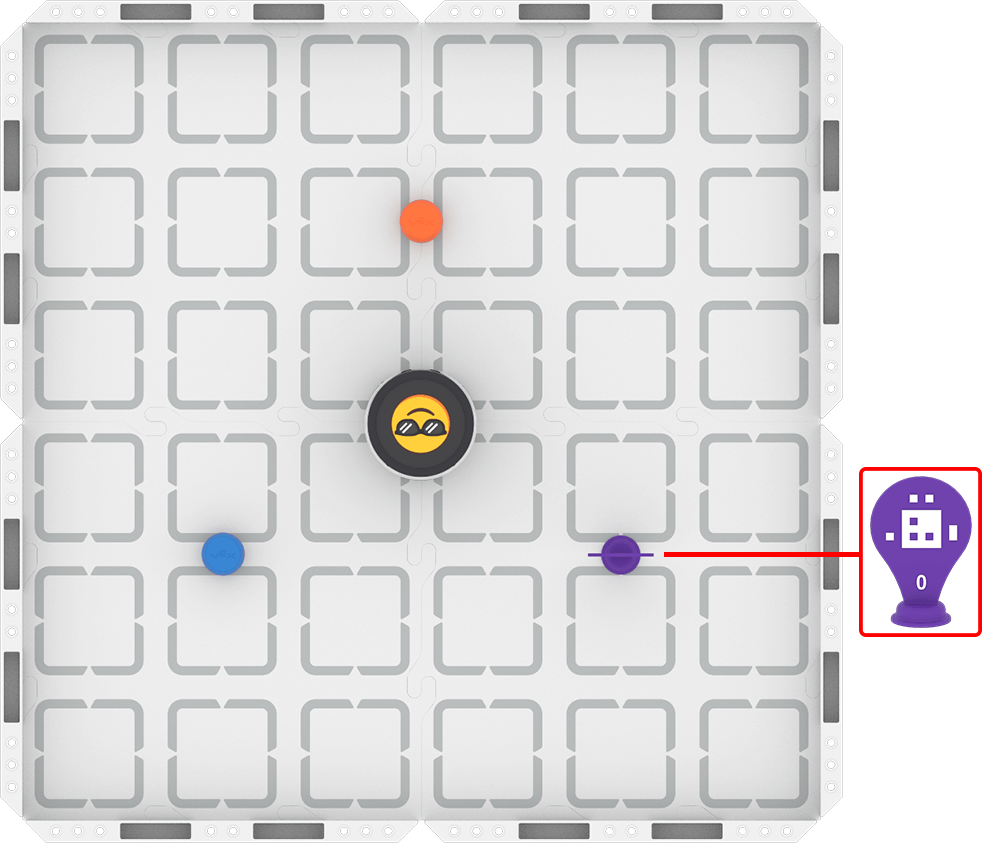
चरण 1: नीचे दिखाए अनुसार फ़ील्ड सेट करें।
चरण 2: ड्राइव मोड का उपयोग करके कार्य को पूरा करने के लिए आवश्यक रोबोट की गतिविधियों का मॉडल बनाएं।
- आपका कार्य रोबोट को तीनों बाधाओं के चारों ओर जितनी जल्दी हो सके चलाना है। अपनी ड्राइविंग का दस्तावेजीकरण करें, फिर उस गतिविधि को कोड करने की योजना बनाएं
- अपने अभ्यास का मार्गदर्शन करने के लिए इस कार्य कार्ड (Google / .docx / .pdf) का उपयोग करें।
- प्रो टिप: अपने कोडिंग प्रोजेक्ट को बनाने के लिए पिछले पाठ में उपयोग किए गए विवरणों पर विचार करें। बाधाओं से बचते हुए प्रत्येक कोण और दूरी पर ध्यान दें, तथा अपनी पथ योजना बनाने के लिए अपनी ड्राइविंग का विस्तृत दस्तावेजीकरण करें।
चरण 3: कार्य पूरा करने के लिए रोबोट को कोड दें।
- चरण 2 में दिए गए अपने नियोजित पथ का उपयोग करके रोबोट को तीनों बाधाओं के चारों ओर यथाशीघ्र गति करने के लिए कोड करें।
- अपने अभ्यास का मार्गदर्शन करने के लिए इस कार्य कार्ड (Google / .docx / .pdf) का उपयोग करें।
- प्रो टिप: अपने कोण और दूरी मापदंडों को निर्धारित करने में सहायता के लिए रोबोट प्रोट्रैक्टर और एक रूलर का उपयोग करें।
चरण 4: अपने रोबोट की गति में सुधार करने के लिए पूर्वानुमान-ड्राइव-माप-कोड प्रक्रिया का उपयोग करें क्योंकि यह दोनों बैरल के चारों ओर घूमता है:
- भविष्यवाणी करना
- अपने रोबोट की गति में सुधार करने के लिए एक कोण चुनकर उसमें थोड़ा समायोजन करें। इस वाक्य स्टेम का उपयोग करके कोण को बेहतर बनाने के बारे में एक समूह भविष्यवाणी करें, और इसे अपनी डायरी में दर्ज करें:
- हमारा मानना है कि कोण लगभग ____________ डिग्री होना चाहिए।
- अपने रोबोट की गति में सुधार करने के लिए एक कोण चुनकर उसमें थोड़ा समायोजन करें। इस वाक्य स्टेम का उपयोग करके कोण को बेहतर बनाने के बारे में एक समूह भविष्यवाणी करें, और इसे अपनी डायरी में दर्ज करें:
- ड्राइव
- अपने रोबोट को अपने अनुमानित कोण पर चलाकर अपनी भविष्यवाणी का परीक्षण करें। यदि यह ठीक न लगे, तो आपको क्या लगता है कि इसे और अधिक सटीक बनाने के लिए आपको क्या परिवर्तन करने की आवश्यकता है? यदि नहीं, तो इसमें क्या सही लगता है
- उपाय
- अपने रोबोट प्रोट्रैक्टर को रोबोट के नीचे रखें। आपने रोबोट को वास्तव में किस कोण पर चलाया?
- कोड
- अपने कोडिंग प्रोजेक्ट में अपने नए दृष्टिकोण का उपयोग करें! अपनी परियोजना को समायोजित करें, फिर परीक्षण के लिए इसे चलाएँ। क्या नए कोण की सटीकता से आपके रोबोट की गति में सुधार होता है? यदि नहीं, तो कोण बदलने में मदद के लिए अपने रोबोट प्रोट्रैक्टर का उपयोग करें और पुनः प्रयास करें। अपने कोण माप और अवलोकनों को अपनी डायरी में अवश्य दर्ज करें।
अभ्यास के लिए संसाधन:
यदि आपको गतिविधि पूरी करते समय अतिरिक्त सहायता की आवश्यकता हो तो यहां लिंक किए गए लेख उपलब्ध हैं।
अब जब आपने वीडियो देख लिया है और उस पर चर्चा कर ली है, तो अब अभ्यास करने की बारी आपकी है!
चरण 1: नीचे दिखाए अनुसार फ़ील्ड सेट करें।
चरण 2: ड्राइव मोड का उपयोग करके कार्य को पूरा करने के लिए आवश्यक रोबोट की गतिविधियों का मॉडल बनाएं।
- आपका कार्य रोबोट को तीनों बाधाओं के चारों ओर जितनी जल्दी हो सके चलाना है। अपनी ड्राइविंग का दस्तावेजीकरण करें, फिर उस गतिविधि को कोड करने की योजना बनाएं
- अपने अभ्यास का मार्गदर्शन करने के लिए इस कार्य कार्ड (Google / .docx / .pdf) का उपयोग करें।
- प्रो टिप: अपने कोडिंग प्रोजेक्ट को बनाने के लिए पिछले पाठ में उपयोग किए गए विवरणों पर विचार करें। बाधाओं से बचते हुए प्रत्येक कोण और दूरी पर ध्यान दें, तथा अपनी पथ योजना बनाने के लिए अपनी ड्राइविंग का विस्तृत दस्तावेजीकरण करें।
चरण 3: कार्य पूरा करने के लिए रोबोट को कोड दें।
- चरण 2 में दिए गए अपने नियोजित पथ का उपयोग करके रोबोट को तीनों बाधाओं के चारों ओर यथाशीघ्र गति करने के लिए कोड करें।
- अपने अभ्यास का मार्गदर्शन करने के लिए इस कार्य कार्ड (Google / .docx / .pdf) का उपयोग करें।
- प्रो टिप: अपने कोण और दूरी मापदंडों को निर्धारित करने में सहायता के लिए रोबोट प्रोट्रैक्टर और एक रूलर का उपयोग करें।
चरण 4: अपने रोबोट की गति में सुधार करने के लिए पूर्वानुमान-ड्राइव-माप-कोड प्रक्रिया का उपयोग करें क्योंकि यह दोनों बैरल के चारों ओर घूमता है:
- भविष्यवाणी करना
- अपने रोबोट की गति में सुधार करने के लिए एक कोण चुनकर उसमें थोड़ा समायोजन करें। इस वाक्य स्टेम का उपयोग करके कोण को बेहतर बनाने के बारे में एक समूह भविष्यवाणी करें, और इसे अपनी डायरी में दर्ज करें:
- हमारा मानना है कि कोण लगभग ____________ डिग्री होना चाहिए।
- अपने रोबोट की गति में सुधार करने के लिए एक कोण चुनकर उसमें थोड़ा समायोजन करें। इस वाक्य स्टेम का उपयोग करके कोण को बेहतर बनाने के बारे में एक समूह भविष्यवाणी करें, और इसे अपनी डायरी में दर्ज करें:
- ड्राइव
- अपने रोबोट को अपने अनुमानित कोण पर चलाकर अपनी भविष्यवाणी का परीक्षण करें। यदि यह ठीक न लगे, तो आपको क्या लगता है कि इसे और अधिक सटीक बनाने के लिए आपको क्या परिवर्तन करने की आवश्यकता है? यदि नहीं, तो इसमें क्या सही लगता है
- उपाय
- अपने रोबोट प्रोट्रैक्टर को रोबोट के नीचे रखें। आपने रोबोट को वास्तव में किस कोण पर चलाया?
- कोड
- अपने कोडिंग प्रोजेक्ट में अपने नए दृष्टिकोण का उपयोग करें! अपनी परियोजना को समायोजित करें, फिर परीक्षण के लिए इसे चलाएँ। क्या नए कोण की सटीकता से आपके रोबोट की गति में सुधार होता है? यदि नहीं, तो कोण बदलने में मदद के लिए अपने रोबोट प्रोट्रैक्टर का उपयोग करें और पुनः प्रयास करें। अपने कोण माप और अवलोकनों को अपनी डायरी में अवश्य दर्ज करें।
अभ्यास के लिए संसाधन:
यदि आपको गतिविधि पूरी करते समय अतिरिक्त सहायता की आवश्यकता हो तो यहां लिंक किए गए लेख उपलब्ध हैं।
शुरुआत में अग्रभूमि समूह कार्य अपेक्षाएँ। कोडिंग में सहयोग की भूमिकाओं के बारे में अधिक जानने के लिए, पेयर प्रोग्रामिंग के बारे में यह लेख देखें इस तरह के प्रश्न पूछें:
- आपका समूह इस गतिविधि को कैसे शुरू करेगा?
- आप यह कैसे सुनिश्चित करेंगे कि हर कोई ड्राइविंग और कोडिंग में योगदान दे?
प्रत्येक छात्र को चरण 2 कार्य कार्ड वितरित करें (Google / .docx / .pdf). याद रखें, कार्य पूरा करने के लिए रोबोट को चलाने का लक्ष्य छात्रों के लिए कार्य का एक भौतिक मॉडल विकसित करना है, जिससे वे कोडिंग शुरू करते समय एक कम्प्यूटेशनल मॉडल का निर्माण करेंगे। सुनिश्चित करें कि सभी छात्र निर्देशित अभ्यास के संचालित भाग के दौरान ड्राइविंग, दस्तावेजीकरण और पथ योजना के लिए आवश्यक समय ले रहे हैं। सरल कार्यों के साथ अच्छी आदतें स्थापित करने से बाद में मदद मिलेगी क्योंकि कार्य अधिक जटिल हो जाते हैं।
जब छात्र अपना ड्राइविंग अभ्यास पूरा कर लें, कमरे में घूमता हूं और छात्रों से उनकी सीख के बारे में पूछता हूं। इस तरह के प्रश्न पूछें:
- गाड़ी चलाते समय आप किस बात पर ध्यान देते हैं जो आपको लगता है कि कोडिंग में आपकी मदद करेगी? यह आपके लिए महत्वपूर्ण क्यों है
- क्या सभी लोग एक ही तरीके से गाड़ी चलाते और दस्तावेज तैयार करते थे? क्या समान या भिन्न है? आप अपने विचारों को एक साझा योजना में कैसे जोड़ सकते हैं?
ड्राइविंग के लिए सफलता के मानदंडों को पूरा करने के बाद प्रत्येक छात्र को चरण 3 कार्य कार्ड वितरित करें, और उनके पथ योजना को आपके साथ साझा करें ( .docx .pdf) इसके बाद छात्र अपनी योजनाओं को अपने VEXcode प्रोजेक्ट के निर्माण के आधार के रूप में उपयोग करेंगे। छात्रों को अपने प्रोजेक्ट बनाते और परीक्षण करते समय अपने ड्राइविंग दस्तावेज में जानकारी जोड़ने के लिए प्रोत्साहित करें, ताकि उन्हें यह पहचानने में मदद मिल सके कि कौन सी रणनीतियां और विवरण सबसे अधिक उपयोगी हैं। वे अपनी सहायता के लिए पूर्ववत करें और पुनः करें बटन का भी उपयोग कर सकते हैं। छात्रों को याद दिलाएं कि वे किसी भी समय ड्राइविंग पर वापस आ सकते हैं, ताकि उन्हें अपने प्रोजेक्ट को सफलतापूर्वक कोड करने में मदद मिल सके।
छात्रों को अपने पथ की योजना बनाते समय मुद्रित रोबोट प्रोट्रैक्टर का उपयोग करने के लिए प्रोत्साहित किया जाता है। यदि छात्रों के पास प्रिंटर उपलब्ध नहीं है, तो उनके लिए इसे प्रिंट करें।
जब छात्र रोबोट को कोड कर रहे होते हैं, कमरे में घूमता हूं और छात्रों के साथ चर्चा करता हूं, ताकि उनकी कोडिंग प्रगति और समझ के बारे में जान सकूं। इस तरह के प्रश्न पूछें:
- आपने पाठ में जो सीखा है उसका उपयोग आप अपने कोण माप को चुनने के लिए कैसे कर रहे हैं?
- आपके विचार में सटीकता और रोबोट की गति के बीच क्या संबंध है?
- इस कार्य को पूरा करने के लिए आपके समूह ने किस प्रकार सहयोग किया
चरण 4 को छात्रों की पुनरावृत्ति और अन्वेषण को बढ़ावा देने के लिए डिज़ाइन किया गया है, ताकि वे ड्राइविंग और कोडिंग के बीच आगे बढ़ सकें, ताकि वे अपनी परियोजनाओं में सुधार कर सकें और कार्य के लिए सर्वोत्तम रणनीति ढूंढ सकें। छात्रों को पूर्वानुमान-ड्राइव-माप-कोड प्रक्रिया का उपयोग करना चाहिए ताकि उन्हें एक समय में अपने रोबोट की गति के बारे में एक चीज में सुधार करने में मदद मिल सके, सटीकता के लिए छोटे कोण समायोजन पर ध्यान केंद्रित करना चाहिए, जिससे उनकी समग्र गति में सुधार होगा। उन्हें अपनी परियोजना में सुधार के लिए इस प्रक्रिया को बार-बार दोहराना चाहिए। इस प्रक्रिया को सुविधाजनक बनाने के लिए, निम्नलिखित प्रश्न पूछें:
- क्या आपके परीक्षण के परिणाम आपकी भविष्यवाणी से मेल खाते हैं? आपको क्या समायोजन करने की आवश्यकता है
- ड्राइव करने से पहले कोण का पूर्वानुमान लगाने से आपको अपने रोबोट की गतिविधियों की सटीकता में सुधार करने में किस प्रकार मदद मिलती है?
- क्या आपके कोणों की सटीकता में सुधार करने से आपके रोबोट को तीनों बैरलों के चारों ओर अधिक तेजी से घूमने में मदद मिल रही है? आपको कैसे मालूम?
- इस पूरी प्रक्रिया के दौरान आपने अपनी डायरी में क्या लिखा है? आप अपनी दस्तावेज़ीकरण प्रक्रिया को कैसे बेहतर बना सकते हैं?
लपेटें
अब जब आपने अभ्यास कर लिया है, तो जो आपने सीखा है उसे साझा करने का समय आ गया है। अपनी सीख पर विचार करने और पूरी कक्षा में चर्चा के लिए तैयार होने में मदद के लिए अपनी डायरी में निम्नलिखित प्रश्नों के उत्तर दें:
- गाड़ी चलाते समय आपने क्या सीखा जिससे आपको कोडिंग में मदद मिली? आपने उस सीख को कैसे दर्ज किया?
- कार्य पूरा करने के लिए समय का अनुकूलन करने के बारे में आपने क्या सीखा?
- सर्वोत्तम कोण और दूरी माप निर्धारित करने के लिए आपने अपने समूह के साथ किस प्रकार सहयोग किया?
अब जब आपने अभ्यास कर लिया है, तो जो आपने सीखा है उसे साझा करने का समय आ गया है। अपनी सीख पर विचार करने और पूरी कक्षा में चर्चा के लिए तैयार होने में मदद के लिए अपनी डायरी में निम्नलिखित प्रश्नों के उत्तर दें:
- गाड़ी चलाते समय आपने क्या सीखा जिससे आपको कोडिंग में मदद मिली? आपने उस सीख को कैसे दर्ज किया?
- कार्य पूरा करने के लिए समय का अनुकूलन करने के बारे में आपने क्या सीखा?
- सर्वोत्तम कोण और दूरी माप निर्धारित करने के लिए आपने अपने समूह के साथ किस प्रकार सहयोग किया?
विद्यार्थियों को अपनी सीख को सम्पूर्ण कक्षा चर्चा में साझा करने के लिए मार्गदर्शन करें। विद्यार्थियों द्वारा अपनी पत्रिका में दिए गए उत्तर चर्चा का प्रारंभिक बिंदु हैं। विद्यार्थियों को साझा समझ के इर्द-गिर्द अपनी सोच को केंद्रित करने के लिए मार्गदर्शन हेतु अनुवर्ती प्रश्न पूछें। निम्नलिखित जैसे प्रश्न पूछें:
- यदि कोई आपसे समयबद्ध चुनौती को पूरा करने की अपनी रणनीति के बारे में पूछे तो आप क्या कहेंगे?
- आपने कोण और दूरियां कैसे ज्ञात कीं? कुछ अलग-अलग तरीके क्या हैं? आपको क्या लगता है कि यह पाठ आपको आगे बढ़ने में कैसे मदद कर सकता है?
- अब आप अपने रोबोट को कोड करने के बारे में क्या जानते हैं जो अभ्यास करने से पहले आपको नहीं पता था? आपके पास इसका समर्थन करने के लिए क्या सबूत हैं
छात्रों द्वारा साझा की गई बातों के आधार पर, पाठ 2 से VEXcode कोडिंग प्रथाओं की साझा सूची में जोड़ें। इन कलाकृतियों को कक्षा की रोबोट कोडिंग की वर्तमान समझ को प्रतिबिंबित करना चाहिए।
यूनिट चैलेंज पर आगे बढ़ने के लिए अगला > चुनें।