
पृष्ठभूमि
इस कोडिंग इकाई में, छात्र कार्यस्थल में कोडिंग रोबोट के लिए प्रामाणिक चुनौतियों को हल करने के लिए VEXcode GO और कोड बेस रोबोट के साथ काम करना सीखेंगे। छात्र चार वास्तविक दुनिया परिदृश्यों के आधार पर कोड बेस रोबोट के साथ VEXcode GO परियोजनाओं की योजना बनाना, बनाना और शुरू करना सीखेंगे।
रोबोट किस प्रकार के काम करते हैं?
रोबोट ऐसे काम भी कर सकते हैं जो मनुष्य के लिए बहुत गंदे, नीरस या खतरनाक हैं। इनमें से कई नौकरियों में वेतन भी अच्छा नहीं मिलता। उदाहरण के लिए, मनुष्य आग बुझाने या समुद्र में गहरे गोता लगाने जैसे कार्य करते समय अपनी जान जोखिम में डाल रहे हैं। रोबोट में ऐसे हार्डवेयर होते हैं जो इस प्रकार के वातावरण में टिके रह सकते हैं, जिससे वे अधिक उपयुक्त और सुरक्षित विकल्प बन जाते हैं। उद्योग लोगों की सुरक्षा के लिए गंदे, नीरस या खतरनाक काम करने के लिए कार्यस्थल पर रोबोटों को तैनात करते हैं, साथ ही अधिक जटिल या इंटरैक्टिव प्रक्रियाओं पर काम करने के लिए मानव संसाधनों को मुक्त करते हैं। यदि रोबोट ये गंदे, खतरनाक और नीरस काम कर लें तो भी मनुष्य के पास करने को बहुत कुछ है। प्रौद्योगिकी प्रगति ने उद्योग के इतिहास में परिवर्तन लाया है। रोबोट भी इससे अलग नहीं हैं।

इस इकाई का प्रत्येक पाठ वास्तविक दुनिया के परिदृश्य की जांच करता है जिसमें रोबोट विभिन्न उद्योगों में गंदे, खतरनाक और नीरस काम करते हैं। छात्र वास्तविक जीवन की चुनौतियों का समाधान तैयार करके नवीन समस्या समाधानकर्ता बन सकते हैं, जैसे कि गंदे, नीरस और खतरनाक कार्यों को करने के लिए रोबोट को कोड करना। VEX GO किट का उपयोग करते समय, छात्र इस बात का विश्लेषण करेंगे कि कोड बेस रोबोट VEXcode GO का उपयोग करके किस प्रकार गति कर सकता है, तथा इस ज्ञान का उपयोग विभिन्न कार्यों, परिदृश्यों या समस्याओं पर विचार-मंथन करने के लिए करेंगे, जिन्हें कोड बेस रोबोट का उपयोग करके हल किया जा सकता है।
गंदे काम
गंदे काम अस्वास्थ्यकर या खतरनाक काम होते हैं जो मानव स्वास्थ्य पर प्रभाव डाल सकते हैं। रोबोट ये प्रतिकूल कार्य कर सकते हैं और मानव को अस्वास्थ्यकर परिस्थितियों के संपर्क में आने से बचा सकते हैं। गंदे सुरंग में काम कर रहे रोबोट का उदाहरण देखने के लिए नीचे दिया गया वीडियो देखें।
रोबोटों का उपयोग खदान अन्वेषण और सीवर की टोह लेने जैसे गंदे कामों में किया गया है। जब सीवर पाइप में कोई समस्या होती है, तो एक दल उसे बंद कर देता है, पाइप तक पहुंचने के लिए खुदाई करता है, फिर बुनियादी ढांचे को ठीक करता है। लेकिन रोबोट समस्या उत्पन्न होने से पहले ही पाइपों की सफाई, मानचित्रण और निरीक्षण कर सकता है।
नीरस नौकरियां
जिन नौकरियों में बार-बार दोहराए जाने वाले कार्यों के लिए बहुत कम मानवीय सोच की आवश्यकता होती है, उन्हें नीरस माना जाता है। इनमें प्रायः ऐसी प्रक्रियाएं शामिल होती हैं जिनका एकमात्र उद्देश्य दक्षता और आउटपुट होता है। रोबोट नीरस कार्यों को सुव्यवस्थित करने के लिए चौबीसों घंटे काम कर सकते हैं, जिससे मानव पूंजी उन कार्यों के लिए मुक्त हो जाती है जिनमें विविधता होती है और जिनमें आलोचनात्मक सोच की आवश्यकता होती है।

उदाहरण के लिए, ई-कॉमर्स के विकास के साथ, पूर्ति केंद्रों की आवश्यकता भी बढ़ रही है। रोबोट ऑर्डर से डिलीवरी तक का समय बढ़ाते हैं, त्रुटियों को कम करते हैं, और मानव श्रमिकों पर बोझ को कम करते हैं।
खतरनाक नौकरियाँ
खतरनाक नौकरियाँ मनुष्यों को हानिकारक परिस्थितियों में डाल देती हैं। इन नौकरियों में चोट से बचाव के लिए रोबोट का उपयोग किया जा सकता है। रोबोट बमों को निष्क्रिय कर सकते हैं, दूरस्थ ग्रहों पर जा सकते हैं, अस्थिर संरचनाओं का निरीक्षण कर सकते हैं और आग बुझाने में मदद कर सकते हैं। रोबोट अनिवार्य रूप से मनुष्यों को समीकरण से बाहर नहीं कर देते, लेकिन उन्हें प्रोग्राम किया जा सकता है या दूर से नियंत्रित किया जा सकता है, जिससे श्रमिकों को सबसे खतरनाक स्थितियों से दूर रखा जा सकता है।

रोबोट अग्निशामकों को जलती हुई इमारतों का आकलन करने में मदद कर सकते हैं। स्मोकबोट आंतरिक मानचित्र बनाता है जिसका उपयोग अग्निशमन कर्मी बाद में जलती हुई इमारत के चारों ओर रास्ता खोजने के लिए कर सकते हैं। थर्माइट रोबोट में एक नली है जो प्रति मिनट 1,893 लीटर (~500 गैलन) पानी पंप करने में सक्षम है। थर्माइट रोबोट में माउंटेड कैमरे लगे होते हैं, इसलिए यह अत्यंत खतरनाक आग लगने की स्थिति में भी पहुंच सकता है तथा इसे एक चौथाई मील दूर से नियंत्रित किया जा सकता है।
ड्राइवट्रेन क्या है?
ड्राइवट्रेन रोबोट को पहियों या अन्य तरीकों का उपयोग करके आगे, पीछे, बाएं या दाएं चलने की अनुमति देता है।
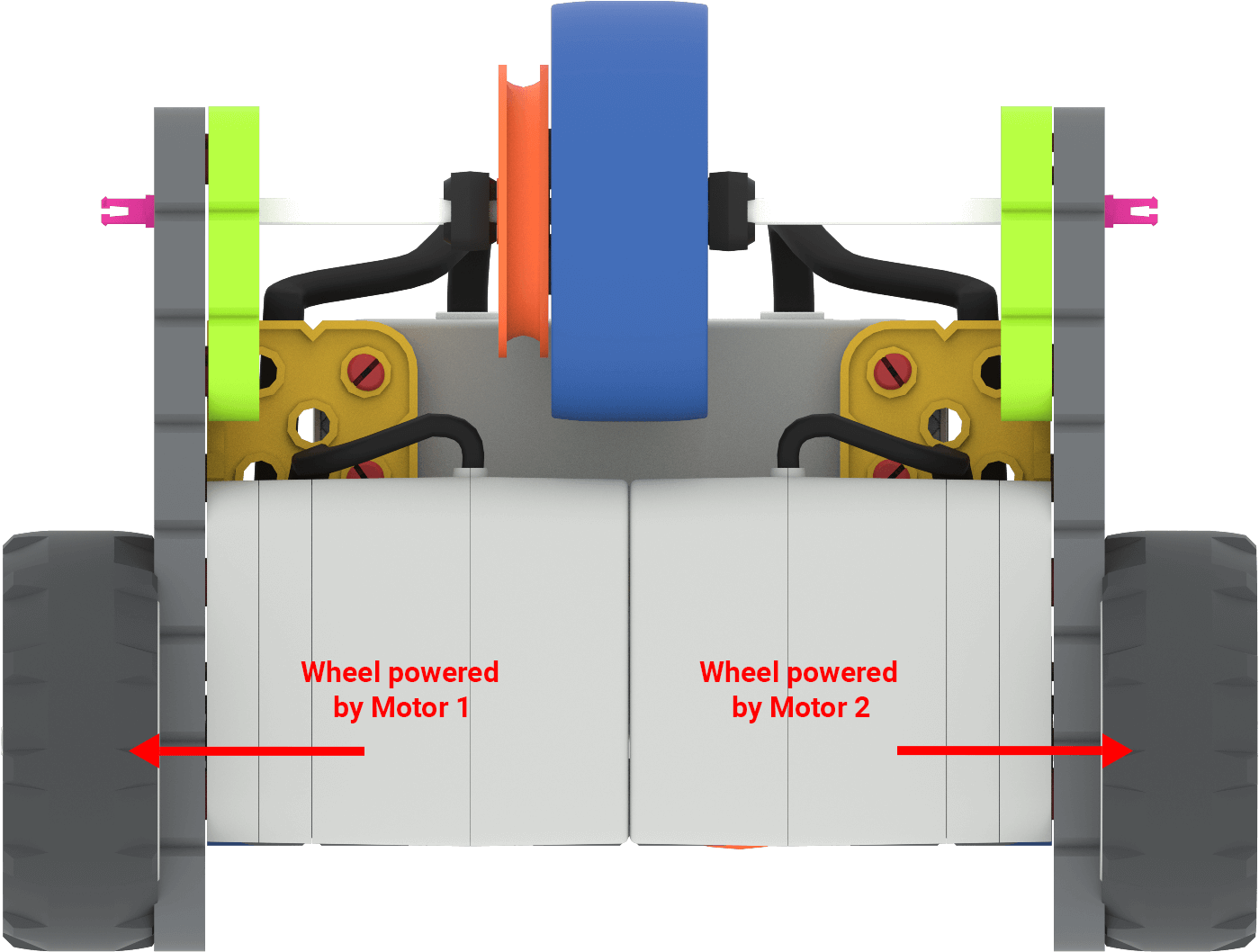
कोड बेस रोबोट में 2-मोटर ड्राइवट्रेन है क्योंकि इसमें दो मोटरें हैं (एक बाईं ओर और एक दाईं ओर) जिन्हें शक्ति दी जा रही है। यद्यपि कोड बेस रोबोट पर चार पहिए हैं, लेकिन उनमें से केवल दो ही मोटर द्वारा संचालित होते हैं। नीले पहिये कोड बेस रोबोट को स्थिर रहने में मदद करते हैं, ताकि वह गिर न जाए। क्या आप कल्पना कर सकते हैं कि यदि कोड बेस केवल दो पहियों के साथ चलने का प्रयास करे? जैसे ही यह आगे या पीछे की ओर बढ़ेगा, यह संभवतः गिर जाएगा।
कोड बेस रोबोट ड्राइवट्रेन का उपयोग करके कैसे मुड़ता है?
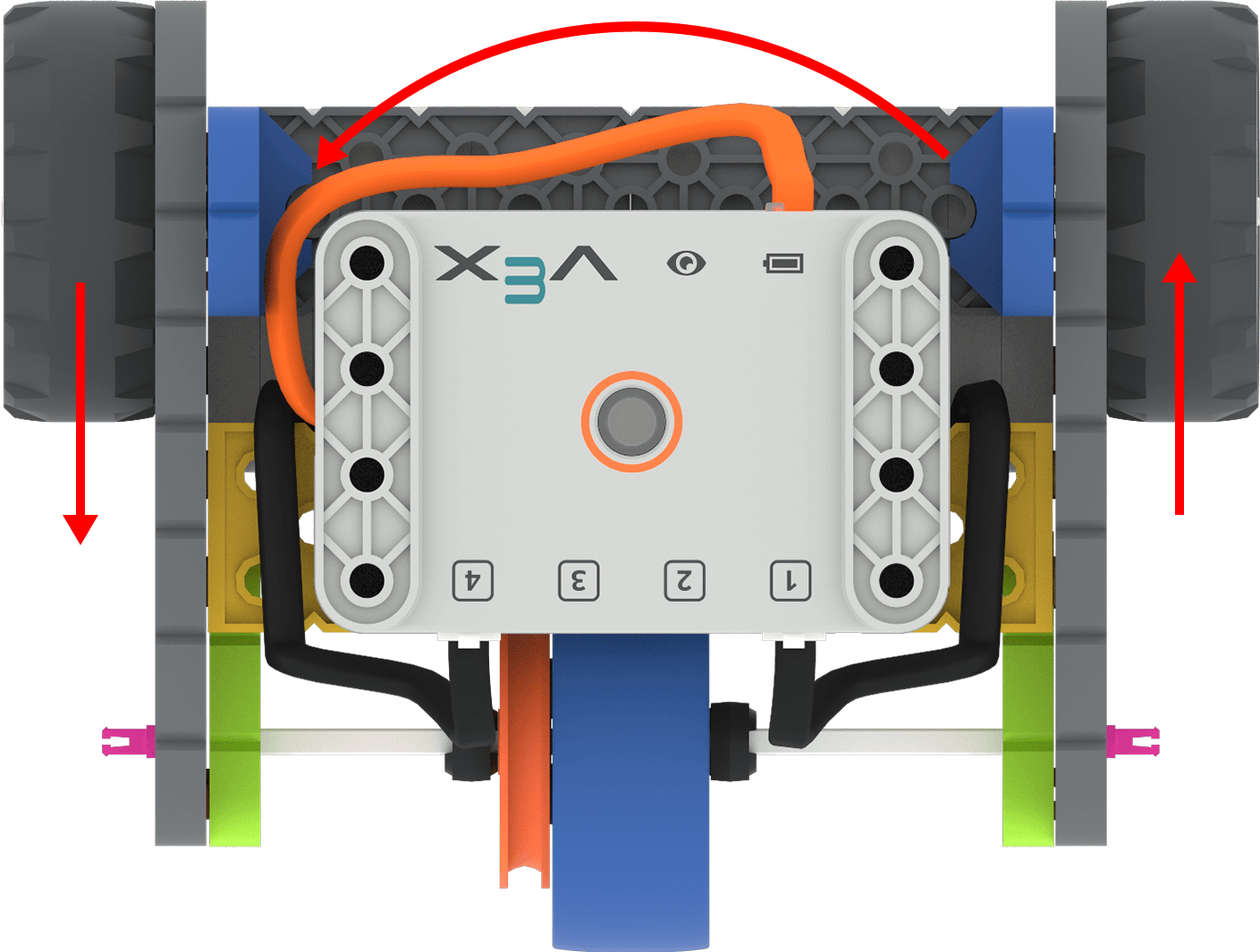
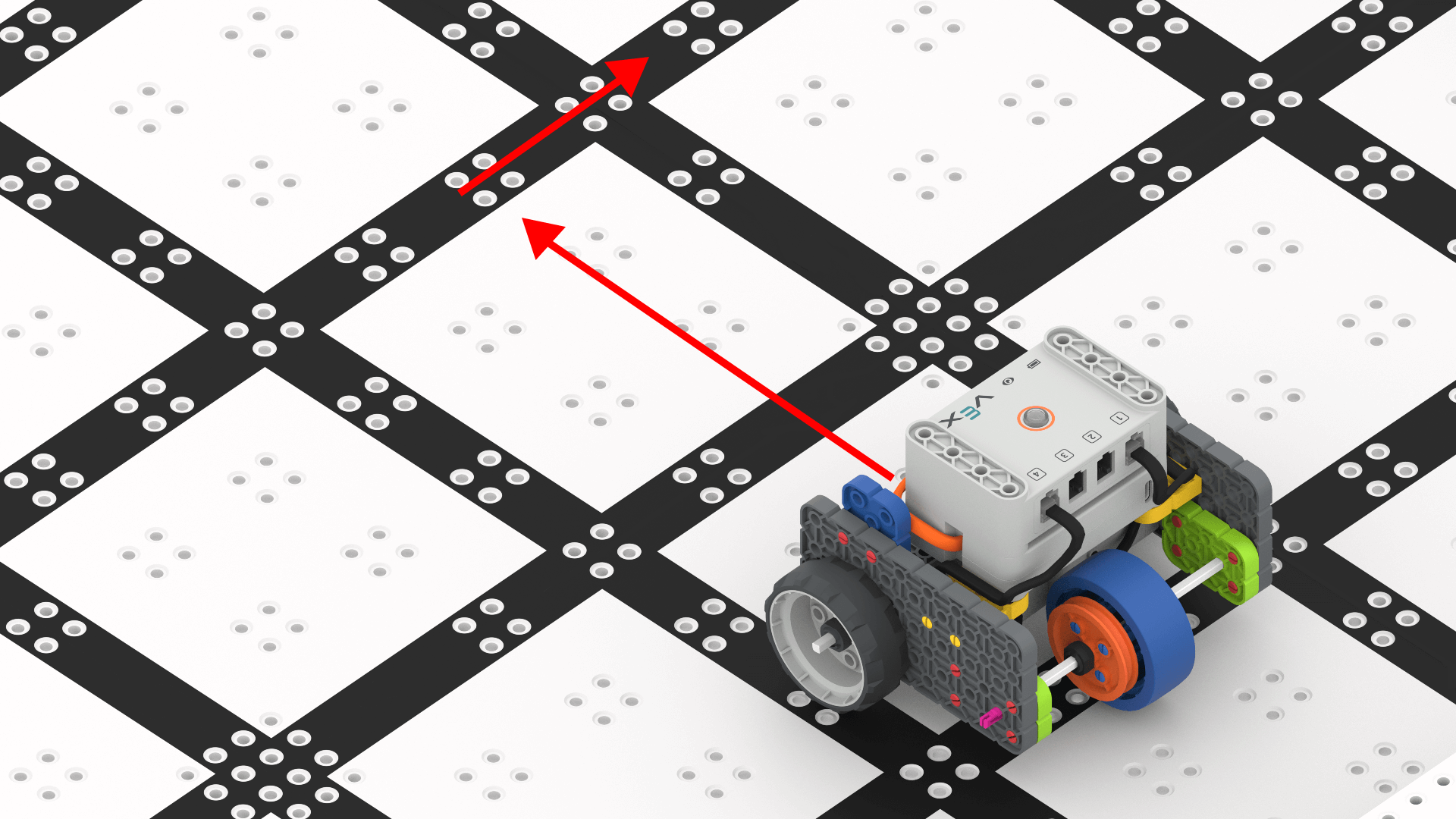
कोड बेस रोबोट पहियों को विपरीत दिशाओं में घुमाकर मोड़ लेता है। बाएँ मोड़ बनाने के लिए, कोड बेस रोबोट का बायाँ अगला पहिया पीछे की ओर घूमेगा, जबकि दायाँ अगला पहिया आगे की ओर घूमेगा।
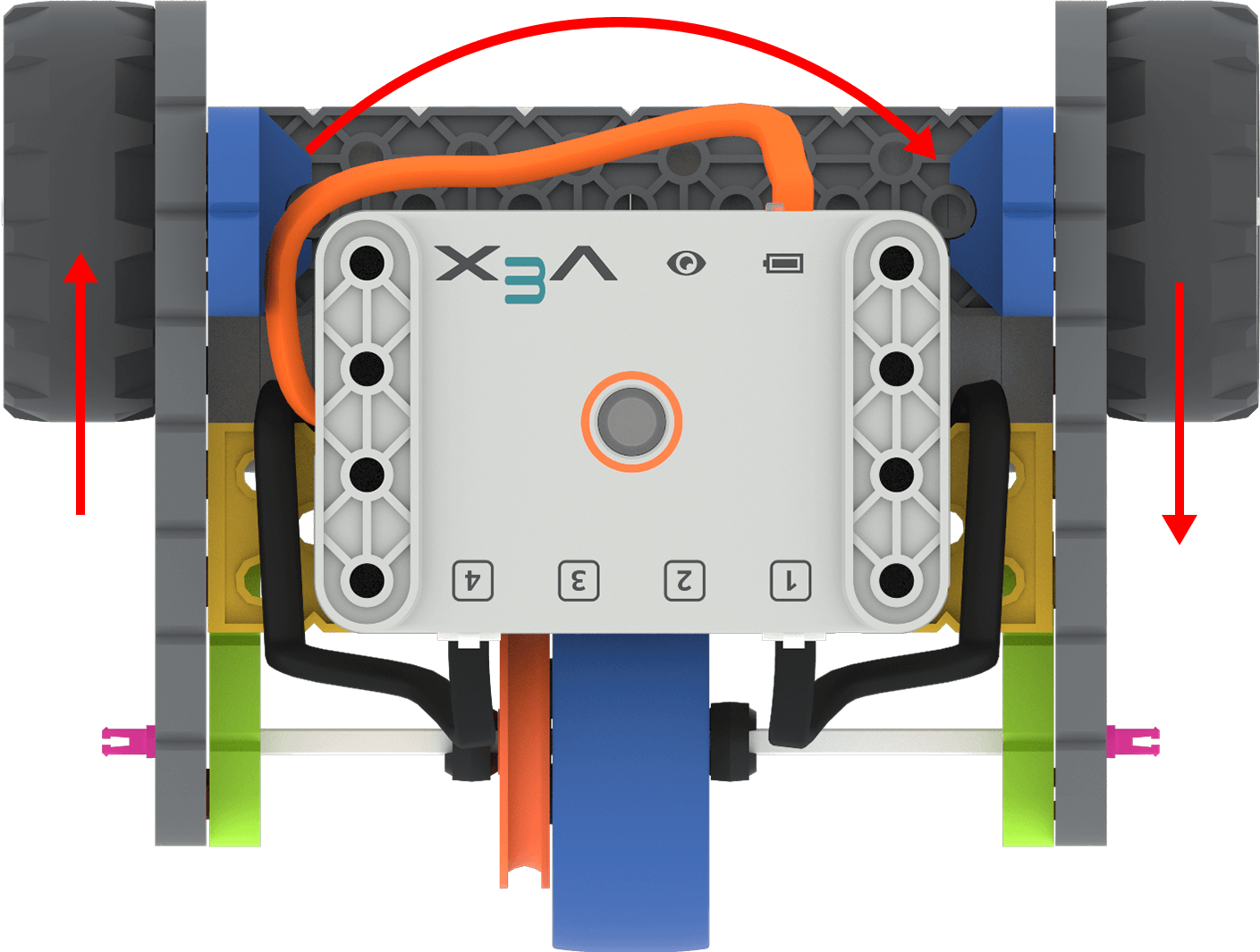
दाएँ मोड़ लेने के लिए, कोड बेस रोबोट का बायाँ अगला पहिया आगे की ओर घूमेगा, जबकि दायाँ अगला पहिया पीछे की ओर घूमेगा।
VEXcode GO क्या है?
VEXcode GO एक कोडिंग वातावरण है जिसका उपयोग VEX GO रोबोट के साथ संचार करने के लिए किया जाता है। छात्र VEXcode प्रोजेक्ट बनाने के लिए ड्रैग और ड्रॉप इंटरफ़ेस का उपयोग करते हैं जो उनके रोबोट की गतिविधियों को नियंत्रित करते हैं। प्रत्येक ब्लॉक के उद्देश्य को दृश्य संकेतों जैसे कि उसके , रंग और लेबलउपयोग करके पहचाना जा सकता है।
इस इकाई में निम्नलिखित VEXcode ब्लॉक प्रस्तुत किये जायेंगे:
{When started} - परियोजना शुरू होने पर ब्लॉकों के संलग्न स्टैक को शुरू करता है।
 |
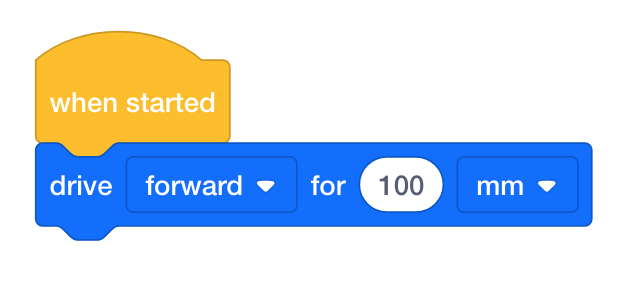 |
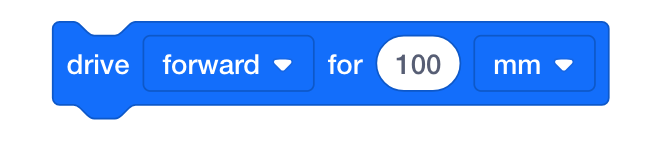
[ड्राइव फॉर] - ड्राइवट्रेन को एक निश्चित दूरी के लिए आगे या पीछे ले जाता है। ड्राइवट्रेन किस दिशा में चलेगा, इसका चयन करें तथा अंडाकार में मान दर्ज करके यह निर्धारित करें कि वह कितनी दूर तक चलेगा।
 |
 |
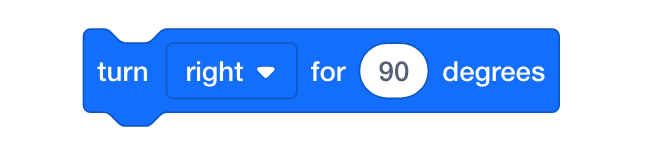
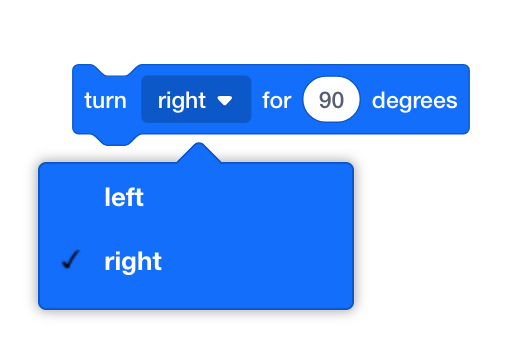
[के लिए घुमाएँ] - ड्राइवट्रेन को एक निश्चित संख्या में डिग्री के लिए बाएँ या दाएँ घुमाता है। ड्राइवट्रेन किस दिशा में घूमेगा, इसका चयन करें, तथा अंडाकार में डिग्री की संख्या दर्ज करके यह निर्धारित करें कि वह कितनी दूर तक घूमेगा।
 |
 |
प्रोग्रामिंग में अपघटन और अनुक्रमण क्या है?
किसी रोबोट को सटीक रूप से यह बताने के लिए कि उसे कैसे चलना है, विघटन और अनुक्रमण दोनों की आवश्यकता होती है। सबसे पहले, समस्या, जैसे कि किसी चुनौती में कैसे आगे बढ़ा जाए, को छोटे-छोटे चरणों और व्यवहारों में विभाजित किया जाएगा। फिर, एक बार जब इन व्यवहारों की पहचान हो जाती है, तो उन्हें सही क्रम में व्यवस्थित करने की आवश्यकता होती है। यह महत्वपूर्ण है, क्योंकि रोबोट केवल उसी प्रकार चलेगा जैसा कि उसे प्रोग्राम किया गया है।
सड़न
विघटन में जटिल समस्या को ऐसे व्यवहारों में तोड़ना शामिल है जो अधिक प्रबंधनीय और समझने में आसान हों। समस्या को छोटे-छोटे भागों में विभाजित करने का अर्थ है कि प्रत्येक भाग की अधिक विस्तार से जांच की जा सकती है तथा उसे अधिक आसानी से हल किया जा सकता है। उदाहरण के लिए, यदि कोई छात्र चाहता है कि उसका रोबोट एक वर्ग में घूमे, तो उसे इसे छोटे-छोटे आदेशों में तोड़ना होगा। छात्रों के लिए विखंडन प्रक्रिया को परिष्कृत करना अभ्यास के लिए महत्वपूर्ण है, क्योंकि हो सकता है कि वे पहले आदेशों को छोटे घटकों में नहीं तोड़ पाएं:
| वर्गाकार विखंडन में आगे बढ़ें 1 | वर्गाकार विखंडन में आगे बढ़ें 2 | वर्गाकार विखंडन में आगे बढ़ें 3 |
|---|---|---|
|
|
|
अनुक्रमण
अनुक्रमण वह विशिष्ट क्रम है जिसमें व्यवहार निष्पादित किए जाते हैं। एक क्रिया या घटना अनुक्रम में अगली क्रमबद्ध क्रिया की ओर ले जाती है। अनुक्रमण महत्वपूर्ण है ताकि छात्र अपने रोबोट को किसी कार्य को सही ढंग से करने के लिए प्रोग्राम कर सकें।
छात्र अपने कोड बेस रोबोट को विभिन्न प्रकार के कार्यों को पूरा करने के लिए प्रोग्राम करेंगे जो रोबोट द्वारा किए जाने वाले वास्तविक कार्यों की नकल करेंगे। उन्हें अपने प्रोग्राम में आदेशों को इस प्रकार क्रमबद्ध करना होगा कि उनका कोड बेस रोबोट चुनौतियों का सामना करने के लिए सही क्रम में आगे, पीछे, बाएं और दाएं चले।
- आगे बढ़ें
- दांए मुड़िए
- आगे बढ़ें
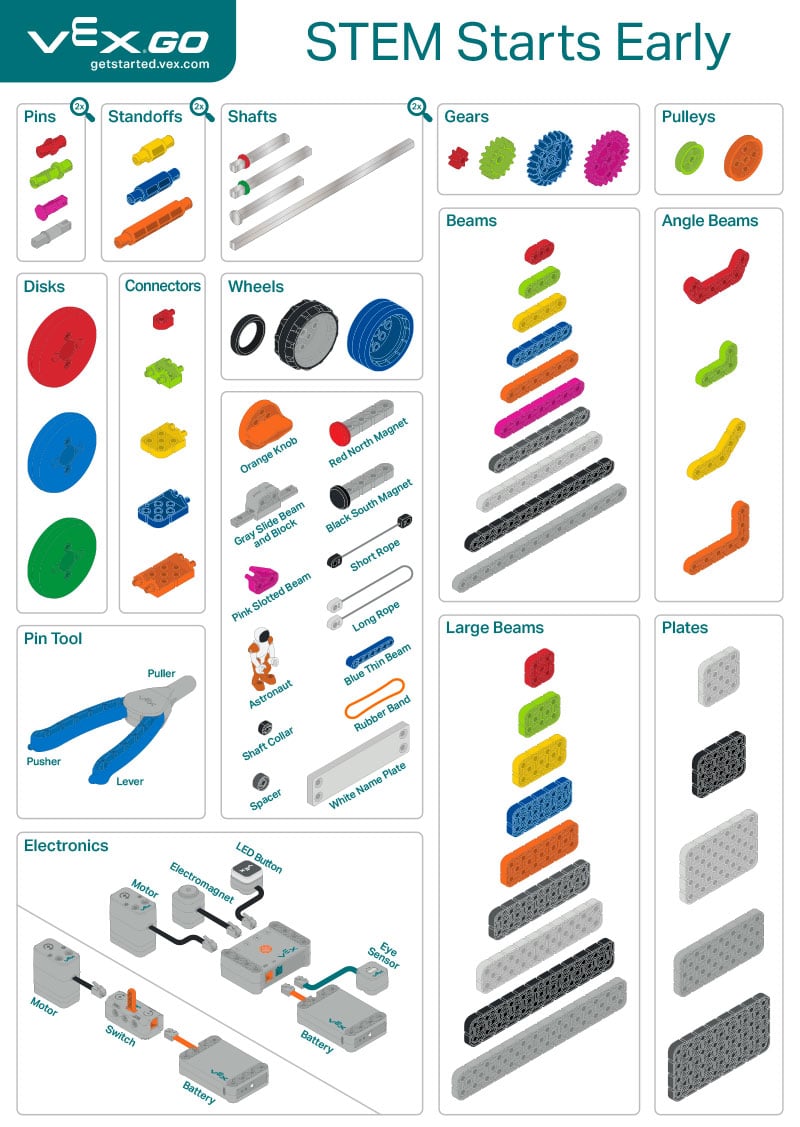
VEX GO टुकड़े
निम्नलिखित VEX GO टुकड़े कोड बेस रोबोट निर्माण के आवश्यक भाग हैं। VEX GO पोस्टर सभी VEX GO टुकड़ों को दर्शाता है और उन्हें निर्माण में उनके कार्य के अनुसार व्यवस्थित करता है। VEX GO टुकड़ों के बारे में अधिक जानकारी VEX GO किट VEX लाइब्रेरी लेख में टुकड़े में पाई जा सकती है।
इलेक्ट्रानिक्स
इलेक्ट्रॉनिक घटकों का उपयोग VEX GO निर्माण कार्यों को शक्ति और नियंत्रण देने के लिए किया जाता है।
बैटरी किसी भी VEX GO निर्माण के लिए आवश्यक है जिसमें इलेक्ट्रॉनिक्स शामिल हैं। बैटरी VEX GO इलेक्ट्रॉनिक घटकों को शक्ति प्रदान करती है।
ब्रेन किसी भी VEX GO बिल्ड के लिए आवश्यक है जिसे VEXcode GO प्रोजेक्ट द्वारा शुरू किया जाता है। मस्तिष्क उपयोगकर्ता परियोजनाओं को क्रियान्वित करता है और मस्तिष्क से जुड़े उपकरणों को नियंत्रित करता है।
मोटर ऊर्जा को गति में परिवर्तित करता है जिसका उपयोग निर्माण में किया जा सकता है। मोटर को मस्तिष्क से जोड़ा जा सकता है और VEXcode GO परियोजना द्वारा नियंत्रित किया जा सकता है।