
Dans cette unité de codage, les étudiants apprendront à travailler avec VEXcode GO et le robot Code Base pour résoudre des défis authentiques pour les robots de codage sur le lieu de travail. Les étudiants apprendront à planifier, créer et démarrer des projets VEXcode GO avec le robot Code Base sur la base de quatre scénarios réels.
Quels types de tâches les robots effectuent-ils ?
Les robots peuvent effectuer des tâches trop sales, ennuyeuses ou dangereuses pour les humains. Beaucoup de ces emplois ne sont pas non plus bien payés. Par exemple, les humains mettent leur vie en danger lorsqu’ils accomplissent des tâches telles que combattre les incendies ou plonger au plus profond de l’océan. Les robots disposent du matériel nécessaire pour fonctionner dans ces types d’environnements, ce qui en fait le choix le plus approprié et le plus sûr. Les industries mettent en œuvre des robots sur le lieu de travail pour effectuer ces tâches sales, ennuyeuses ou dangereuses afin de protéger les personnes, tout en libérant des ressources humaines pour travailler sur des processus plus complexes ou interactifs. Les humains ont encore beaucoup à faire si les robots acceptent ces tâches sales, dangereuses et ennuyeuses. Les progrès technologiques ont apporté des changements tout au long de l’histoire de l’industrie. Les robots ne sont pas différents.

Chaque leçon de cette unité étudie un scénario réel dans lequel des robots effectuent des tâches sales, dangereuses et ennuyeuses dans diverses industries. Les étudiants peuvent résoudre des problèmes de manière innovante en créant des solutions à des défis de la vie réelle, tels que la façon de coder des robots pour qu'ils effectuent des tâches sales, ennuyeuses et dangereuses. En utilisant les kits VEX GO, les étudiants analyseront les capacités de déplacement du robot Code Base à l'aide de VEXcode GO et utiliseront ces connaissances pour réfléchir à différents travaux, scénarios ou problèmes pouvant être résolus à l'aide du robot Code Base.
Sales boulots
Les travaux salissants sont des travaux insalubres ou dangereux qui peuvent avoir un impact sur la santé humaine. Les robots peuvent effectuer ces tâches défavorables et limiter l’exposition humaine à des conditions insalubres.
Des robots ont été utilisés dans des tâches salissantes telles que l’exploration minière et la reconnaissance des égouts. Lorsqu'il y a un problème avec un tuyau d'égout, une équipe le ferme, creuse pour accéder au tuyau, puis répare l'infrastructure. Mais un robot peut nettoyer, cartographier et inspecter les canalisations avant que les problèmes ne surviennent.
Des emplois ennuyeux
Les emplois qui nécessitent des fonctions répétitives nécessitent peu de réflexion humaine sont considérés comme ennuyeux. Ils incluent souvent des processus qui ont pour seul objectif l’efficacité et le rendement. Les robots peuvent travailler 24 heures sur 24 pour rationaliser les tâches ennuyeuses, ce qui libère du capital humain pour des tâches qui comportent un élément de variété et nécessitent une pensée critique.

Par exemple, avec la croissance du commerce électronique, le besoin de centres de distribution augmente. Les robots augmentent les délais de livraison, réduisent les erreurs et minimisent la charge des travailleurs humains.
Emplois dangereux
Les emplois dangereux mettent les humains dans des situations dangereuses. Des robots peuvent être utilisés dans ces travaux pour prévenir les blessures. Les robots peuvent désamorcer des bombes, traverser des planètes lointaines, inspecter des structures instables et aider à combattre les incendies. Les robots ne suppriment pas nécessairement les humains de l'équation, mais ils peuvent être programmés ou contrôlés à distance pour empêcher les travailleurs d'accéder aux situations les plus dangereuses.

Les robots peuvent aider les pompiers à évaluer les bâtiments en feu. Le SmokeBot crée des cartes intérieures que les pompiers peuvent utiliser plus tard pour se repérer dans un bâtiment en feu. Le robot Thermite est doté d'un tuyau capable de pomper à 1 893 litres (~ 500 gallons) d'eau par minute. Le robot Thermite utilise des caméras montées, ce qui lui permet de se déplacer dans des incendies extrêmement dangereux tout en étant contrôlé jusqu'à un quart de mile de distance.
Qu’est-ce qu’une transmission ?
Une transmission permet à un robot d'avancer, de reculer, de gauche ou de droite à l'aide de roues ou d'autres méthodes.
Le robot Code Base dispose d'une transmission à 2 moteurs car il y a deux moteurs (un sur le côté gauche et un sur le côté droit) qui sont alimentés. Même si le robot Code Base comporte quatre roues, seules deux d’entre elles sont propulsées par des moteurs. Les Blue Wheels aident le robot Code Base à rester stable, afin qu'il ne tombe pas. Pouvez-vous imaginer si le Code Base essayait de se déplacer avec seulement deux roues ? Il tomberait probablement dès qu’il avancerait ou reculerait.

Comment le robot à base de code tourne-t-il à l’aide d’une transmission ?
Le robot Code Base effectue des virages en faisant tourner les roues dans des directions opposées. Pour effectuer un tour à gauche , la roue avant gauche du robot Code Base tournera vers l'arrière, tandis que la roue avant droite tournera vers l'avant.

Pour effectuer un tour à droite , la roue avant gauche du robot Code Base tournera vers l'avant, tandis que la roue avant droite tournera vers l'arrière.

Qu'est-ce que VEXcode GO ?
VEXcode GO est un environnement de codage utilisé pour communiquer avec les robots VEX GO. Les étudiants utilisent l'interface glisser-déposer pour créer des projets VEXcode qui contrôlent les actions de leurs robots. L'objectif de chaque bloc peut être identifié à l'aide d'indices visuels tels que sa forme , sa couleur et son étiquette.
Les blocs VEXcode suivants seront introduits dans cette unité :
{When started} - démarre la pile de blocs attachée au démarrage du projet.

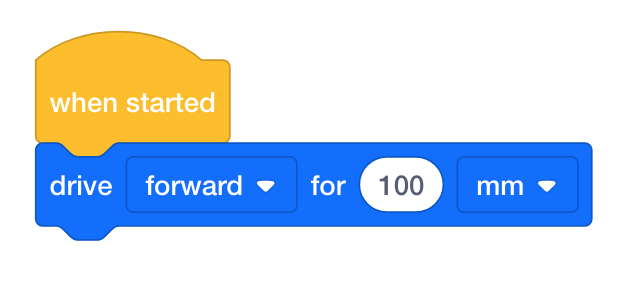
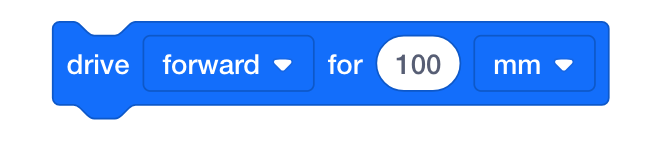
[Conduire pour] - déplace la transmission vers l'avant ou vers l'arrière sur une distance donnée. Choisissez la direction dans laquelle la transmission se déplacera et définissez la distance dans laquelle elle se déplacera en entrant une valeur dans l'ovale.

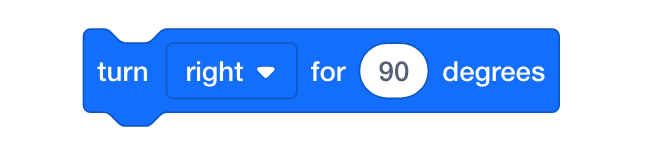
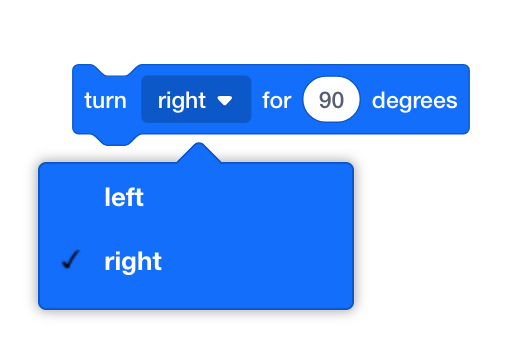
[Tourner pour] - fait pivoter la transmission vers la gauche ou la droite d'un nombre de degrés donné. Choisissez la direction dans laquelle la transmission tournera et définissez la distance dans laquelle elle se déplacera en entrant un certain nombre de degrés dans l'ovale.
Qu’est-ce que la décomposition et le séquençage en programmation ?
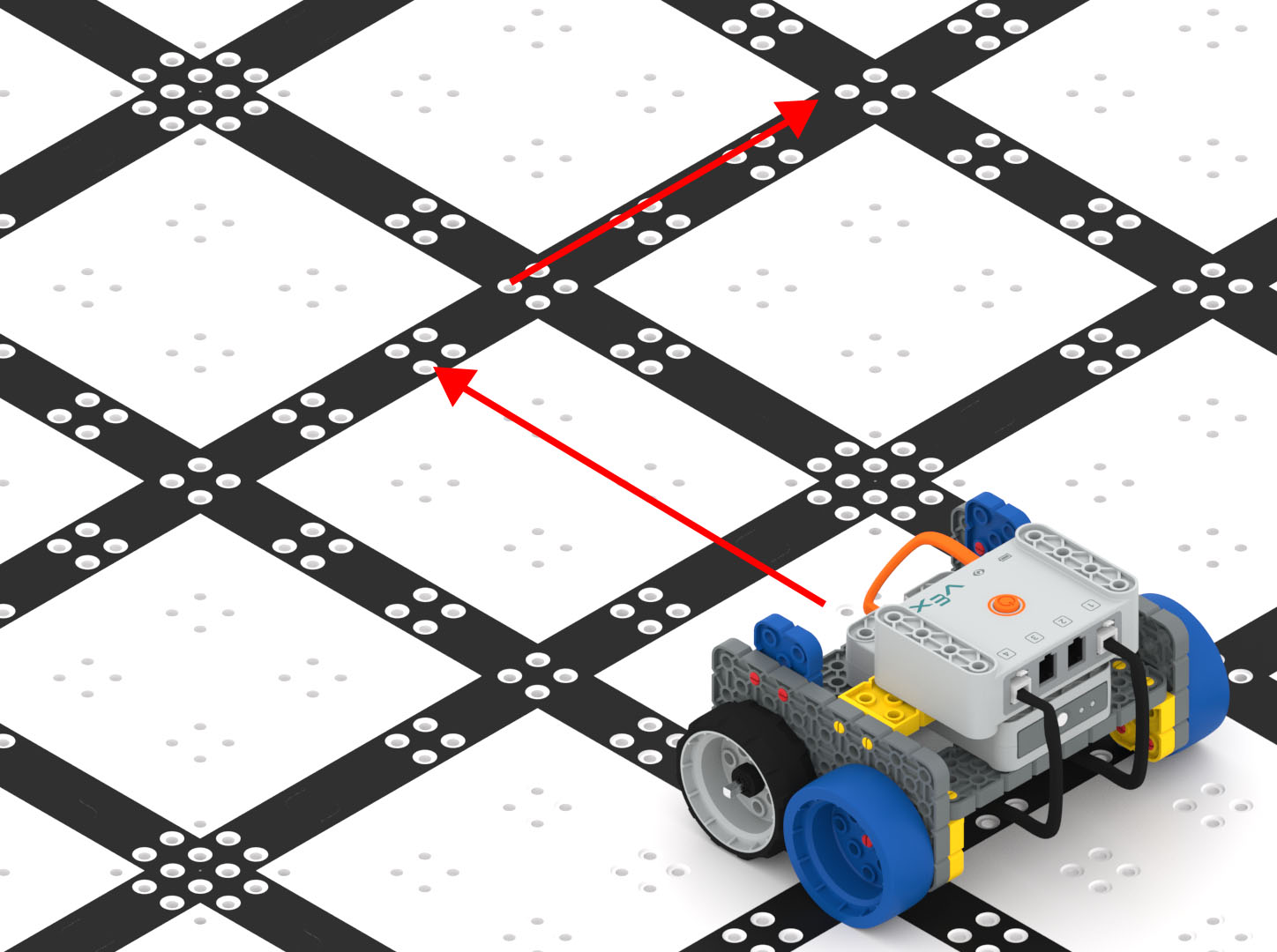
Afin de dire à un robot exactement et précisément comment se déplacer, la décomposition et le séquençage sont nécessaires. Premièrement, le problème, comme comment naviguer dans un défi, sera décomposé en incréments et comportements plus petits. Ensuite, une fois ces comportements identifiés, il faut les organiser dans le bon ordre. Ceci est important, car le robot se déplacera exactement comme il est programmé.
Décomposition
La décomposition consiste à décomposer un problème complexe en comportements plus gérables et plus faciles à comprendre. Diviser le problème en parties plus petites signifie que chaque partie peut être examinée plus en détail et résolue plus facilement. Par exemple, si un élève souhaite que son robot se déplace dans un carré, il devra le diviser en commandes plus petites. Il est important que les élèves s'entraînent à affiner le processus de décomposition, car ils ne peuvent pas diviser les commandes en composants plus petits au début :
| Se déplacer en carré 1 | Se déplacer dans une répartition carrée 2 | Se déplacer en carré 3 |
|---|---|---|
|
|
|
Séquençage
Le séquençage est l'ordre spécifique dans lequel les comportements sont exécutés. Une action ou un événement mène à l’action ordonnée suivante dans une séquence. Le séquençage est important pour que les élèves puissent programmer leurs robots pour qu'ils effectuent correctement une tâche.
Les étudiants programmeront leur robot Code Base pour effectuer une variété de tâches qui imitent les tâches authentiques effectuées par les robots. Ils devront séquencer les commandes dans leur programme afin que leur robot Code Base avance, recule, gauche et droite dans le bon ordre pour relever les défis.
- Avance
- Tournez à droite
- Avance
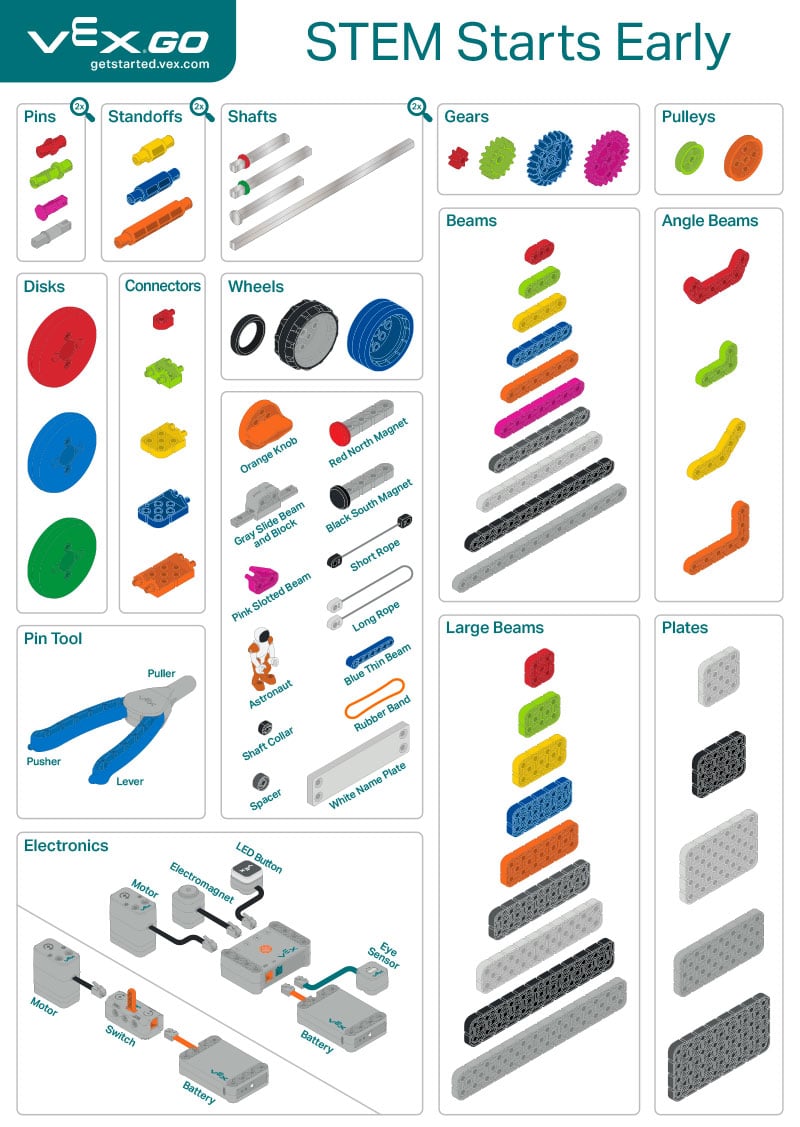
Pièces VEX GO
Les pièces VEX GO suivantes sont des éléments essentiels de la construction du robot Code Base. L'affiche VEX GO illustre toutes les pièces de VEX GO et les organise en fonction de leur fonction dans une construction. Plus d'informations sur les pièces VEX GO peuvent être trouvées dans l'article Pieces in the VEX GO Kit VEX Library.
Électronique
Les composants électroniques sont utilisés pour alimenter et contrôler les fonctions de construction de VEX GO.
La batterie est essentielle pour toute construction VEX GO comprenant de l'électronique. La batterie alimente les composants électroniques du VEX GO.
Le Brain est essentiel pour toute build VEX GO démarrée par un projet VEXcode GO. Le Brain exécute projet utilisateur et contrôle les appareils connectés au Brain.
Le moteur transforme l'énergie en mouvement qui peut être utilisé dans une construction. Le moteur peut être connecté au cerveau et contrôlé par un projet VEXcode GO.