
Latar belakang
Dalam unit pengkodean ini, siswa akan mempelajari cara bekerja dengan VEXcode GO dan robot Basis Kode untuk memecahkan tantangan autentik bagi robot pengkodean di tempat kerja. Siswa akan belajar cara merencanakan, membuat, dan memulai proyek VEXcode GO dengan robot Code Base berdasarkan empat skenario dunia nyata.
Jenis Pekerjaan Apa yang Dilakukan Robot?
Robot dapat melakukan pekerjaan yang terlalu kotor, membosankan, atau berbahaya bagi manusia. Banyak dari pekerjaan ini juga tidak membayar dengan baik. Misalnya, manusia mempertaruhkan nyawa mereka saat melakukan tugas seperti memadamkan api atau menyelam di kedalaman laut. Robot memiliki perangkat keras untuk mampu bertahan di lingkungan jenis ini, menjadikannya pilihan yang lebih cocok dan aman. Industri menerapkan robot di tempat kerja untuk melakukan pekerjaan yang kotor, membosankan, atau berbahaya guna melindungi orang, sekaligus membebaskan sumber daya manusia untuk bekerja pada proses yang lebih kompleks atau interaktif. Manusia masih harus melakukan banyak hal jika robot mengambil alih pekerjaan yang kotor, berbahaya, dan membosankan ini. Kemajuan teknologi telah membawa perubahan sepanjang sejarah industri. Robot tidak berbeda.

Setiap pelajaran dalam unit ini menyelidiki skenario dunia nyata di mana robot melakukan pekerjaan kotor, berbahaya, dan membosankan di berbagai industri. Siswa dapat menjadi pemecah masalah yang inovatif dengan menciptakan solusi untuk tantangan kehidupan nyata, seperti cara membuat kode robot untuk melakukan tugas-tugas yang kotor, membosankan, dan berbahaya. Saat menggunakan VEX GO Kits, siswa akan menganalisis kemampuan bagaimana robot Code Base dapat bergerak menggunakan VEXcode GO, dan menggunakan pengetahuan ini untuk bertukar pikiran tentang berbagai pekerjaan, skenario, atau masalah yang dapat dipecahkan menggunakan robot Code Base.
Pekerjaan Kotor
Pekerjaan kotor adalah pekerjaan yang tidak sehat atau berbahaya yang dapat memengaruhi kesehatan manusia. Robot dapat melakukan pekerjaan yang tidak menguntungkan ini dan membatasi paparan manusia terhadap kondisi yang tidak sehat. Tonton video di bawah untuk contoh robot yang bekerja di terowongan kotor.
Robot telah diimplementasikan dalam pekerjaan kotor seperti eksplorasi tambang dan pengintaian saluran pembuangan. Bila terjadi masalah pada pipa saluran pembuangan, kru akan mematikannya, menggali untuk mengakses pipa, lalu memperbaiki infrastrukturnya. Namun robot dapat membersihkan, memetakan, dan memeriksa pipa sebelum masalah muncul.
Pekerjaan Membosankan
Pekerjaan yang memerlukan fungsi berulang yang hanya memerlukan sedikit pemikiran manusia dianggap membosankan. Mereka sering kali mencakup proses yang memiliki tujuan tunggal berupa efisiensi dan hasil. Robot dapat bekerja sepanjang waktu untuk menyederhanakan pekerjaan yang membosankan, yang membebaskan modal manusia untuk tugas-tugas yang memiliki unsur variasi dan membutuhkan pemikiran kritis.

Misalnya, dengan pertumbuhan e-commerce, ada peningkatan kebutuhan akan pusat pemenuhan. Robot meningkatkan waktu pemesanan hingga pengiriman, mengurangi kesalahan, dan meminimalkan beban pada pekerja manusia.
Pekerjaan Berbahaya
Pekerjaan berbahaya menempatkan manusia dalam situasi berbahaya. Robot dapat digunakan dalam pekerjaan ini untuk mencegah cedera. Robot dapat menjinakkan bom, melintasi planet yang jauh, memeriksa struktur yang tidak stabil, dan membantu memadamkan kebakaran. Robot tidak serta-merta menyingkirkan manusia dari persamaan, tetapi mereka dapat diprogram atau dikendalikan dari jarak jauh sehingga menjauhkan pekerja dari situasi yang paling berbahaya.

Robot dapat membantu petugas pemadam kebakaran menilai bangunan yang terbakar. SmokeBot membuat peta interior yang dapat digunakan petugas pemadam kebakaran nantinya untuk menemukan jalan di sekitar gedung yang terbakar. Robot Thermite memiliki selang yang mampu memompa 1.893 liter (~500 galon) air per menit. Robot Thermite menggunakan kamera yang terpasang, sehingga dapat menjelajah ke dalam kebakaran yang sangat berbahaya sambil dikendalikan dari jarak hingga seperempat mil.
Apa itu Drivetrain?
Sistem penggerak memungkinkan robot bergerak maju, mundur, ke kiri, atau ke kanan menggunakan roda atau metode lainnya.
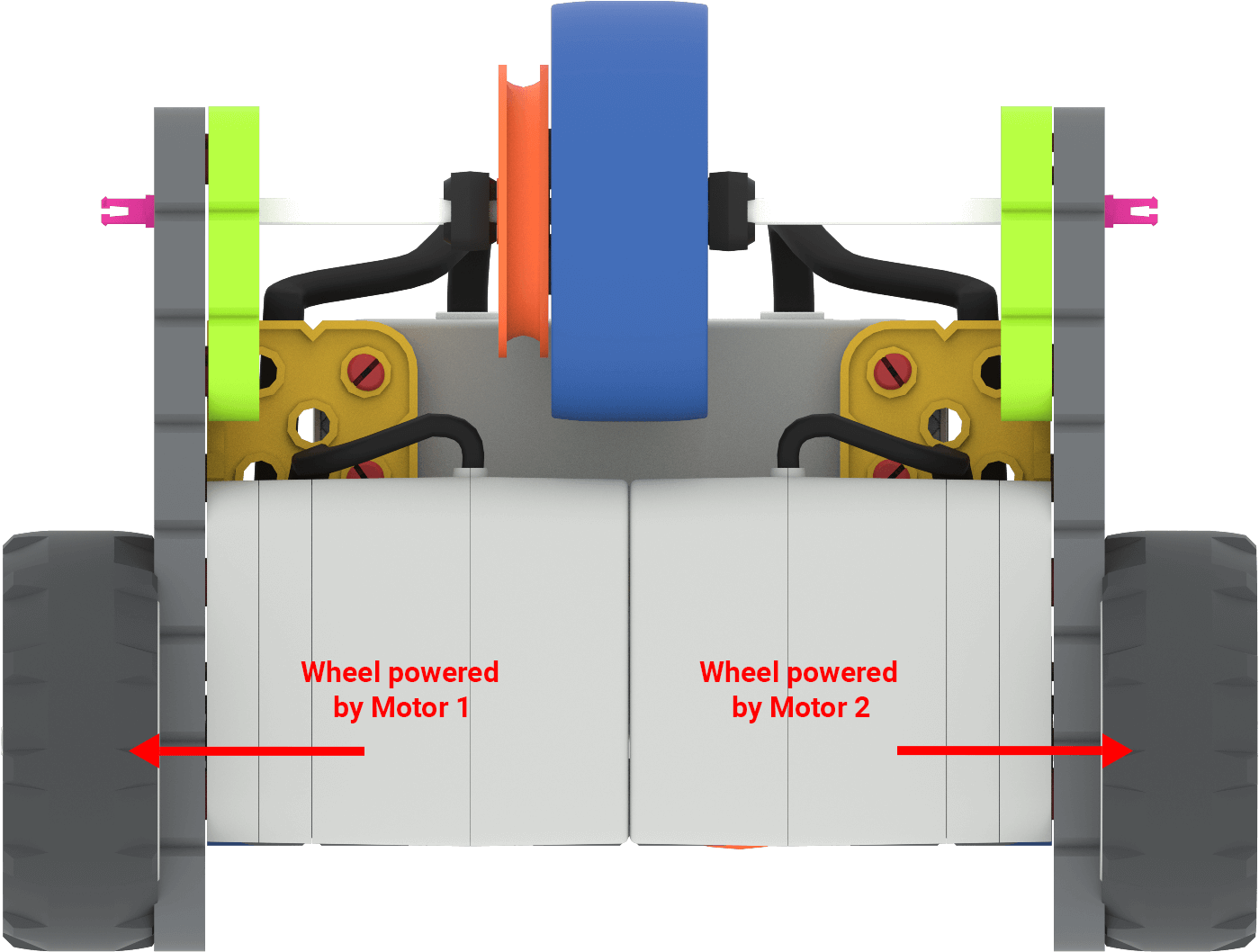
Robot Code Base memiliki drivetrain 2 motor karena ada dua motor (satu di kiri dan satu di kanan) yang memberi daya. Meskipun ada empat roda pada robot Code Base, hanya dua di antaranya yang digerakkan oleh motor. Roda Biru membantu robot Basis Kode tetap stabil, sehingga tidak terjatuh. Dapatkah Anda bayangkan jika Basis Kode mencoba bergerak hanya dengan dua roda? Kemungkinan besar akan terjatuh segera setelah melaju maju atau mundur.
Bagaimana Robot Basis Kode Berputar Menggunakan Drivetrain?
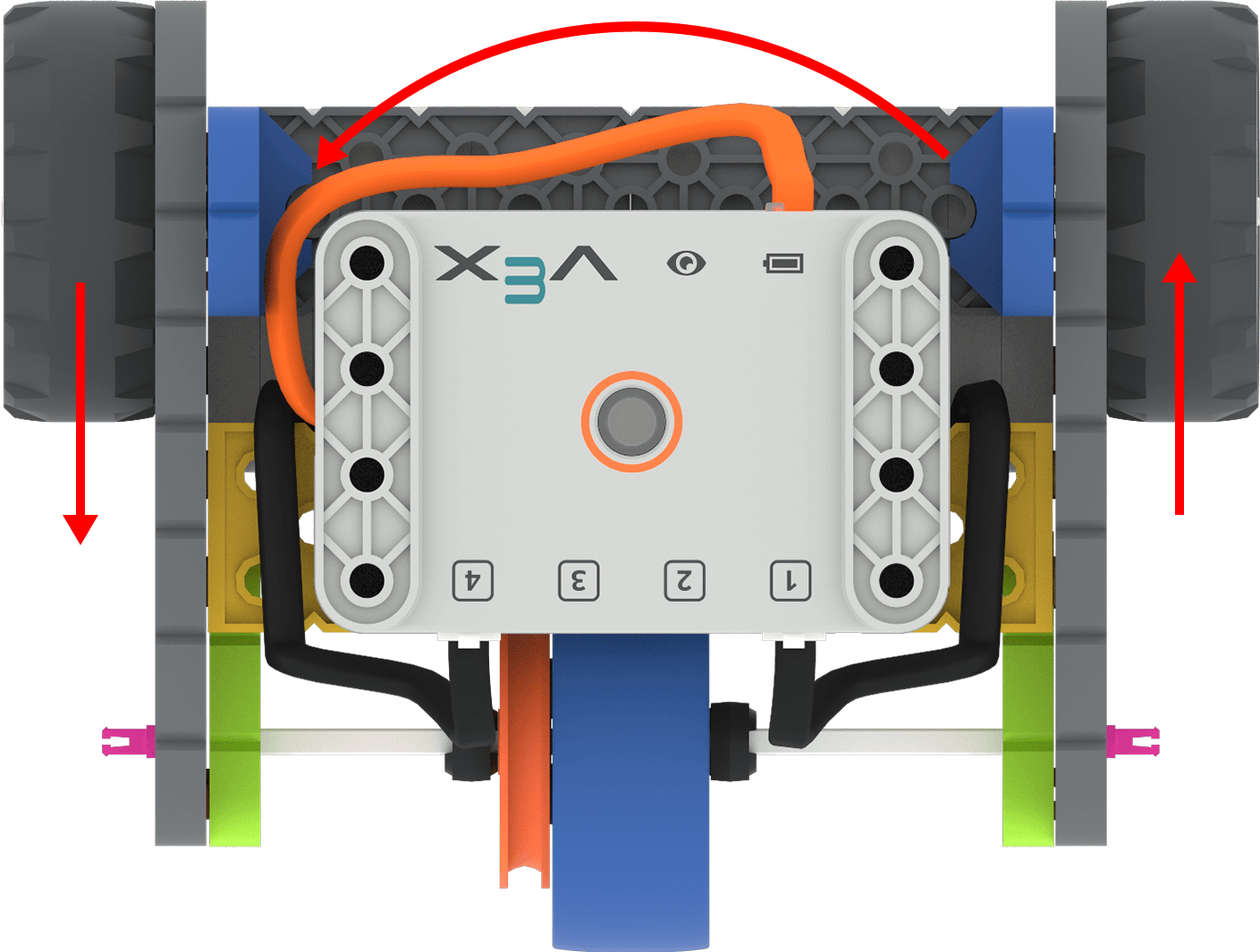
Robot Basis Kode berbelok dengan memutar roda ke arah berlawanan. Untuk melakukan belokan ke kiri , roda depan kiri robot Basis Kode akan berputar ke belakang, sedangkan roda depan kanan akan berputar ke depan.
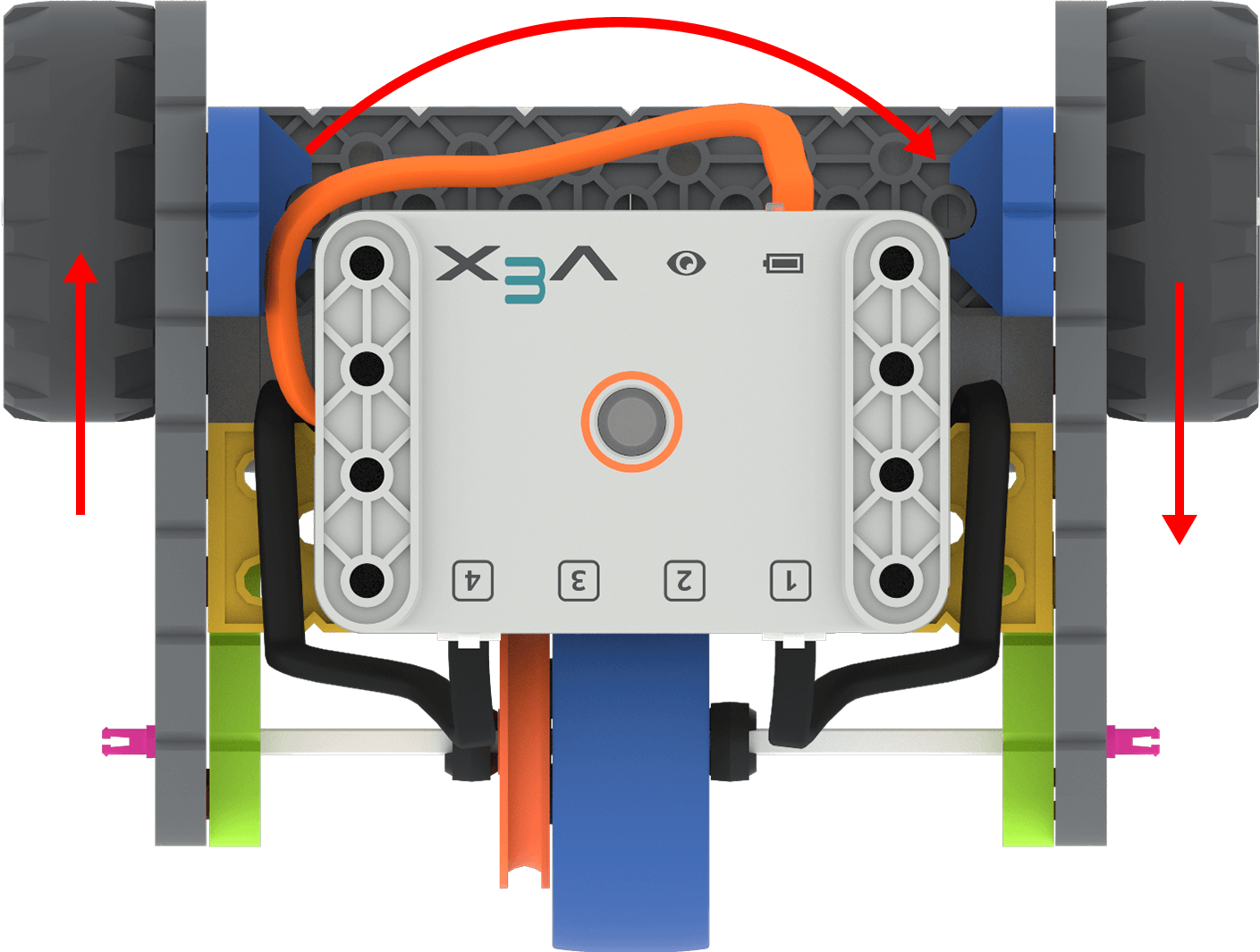
Untuk melakukan belokan ke kanan , roda depan kiri robot Basis Kode akan berputar ke depan, sedangkan roda depan kanan akan berputar ke belakang.
Apa itu VEXcode GO?
VEXcode GO adalah lingkungan pengkodean yang digunakan untuk berkomunikasi dengan Robot VEX GO. Siswa menggunakan antarmuka drag and drop untuk membuat proyek VEXcode yang mengendalikan tindakan robot mereka. Tujuan setiap blok dapat diidentifikasi menggunakan isyarat visual seperti bentuk , warna, dan labelnya.
Blok VEXcode berikut akan diperkenalkan dalam unit ini:
{When started} - memulai tumpukan blok yang terlampir saat proyek dimulai.
 |
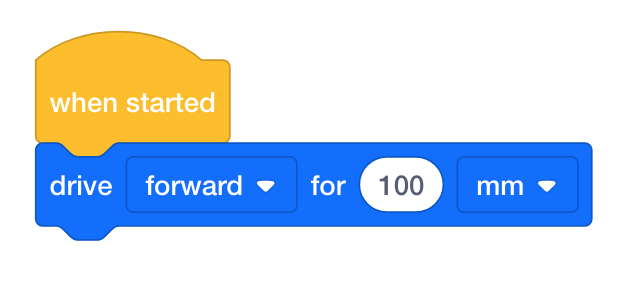 |
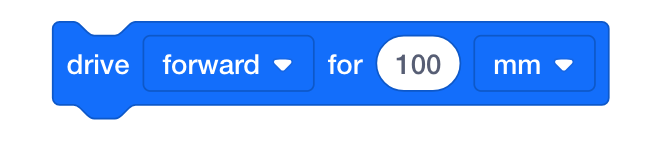
[Berkendara selama] - menggerakkan Drivetrain maju atau mundur untuk jarak tertentu. Pilih arah pergerakan Drivetrain, dan atur seberapa jauh pergerakannya dengan memasukkan nilai pada oval.
 |
 |
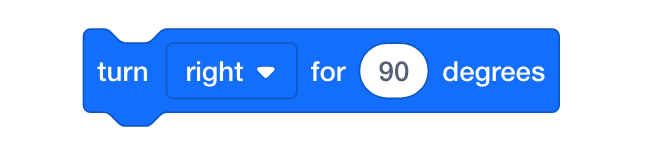
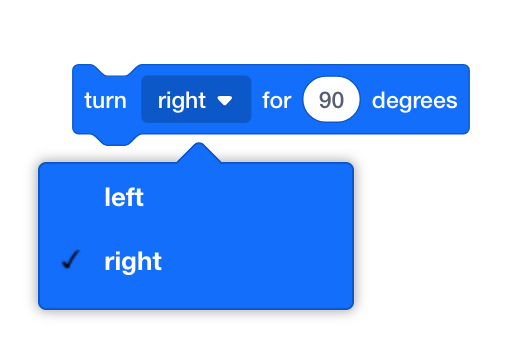
[Putar selama] - memutar Drivetrain ke kiri atau kanan untuk sejumlah derajat tertentu. Pilih arah putaran Drivetrain, dan atur seberapa jauh pergerakannya dengan memasukkan sejumlah derajat pada oval.
 |
 |
Apa itu Dekomposisi dan Pengurutan dalam Pemrograman?
Untuk memberi tahu robot secara tepat dan akurat cara bergerak, diperlukan dekomposisi dan pengurutan. Pertama, masalahnya, seperti cara menavigasi tantangan, akan diurai menjadi peningkatan dan perilaku yang lebih kecil. Kemudian, setelah perilaku ini diidentifikasi, perilaku tersebut perlu diatur ke dalam urutan yang benar. Hal ini penting karena robot hanya akan bergerak sesuai dengan program yang telah dibuat.
Penguraian
Dekomposisi melibatkan pemecahan masalah kompleks menjadi perilaku yang lebih mudah dikelola dan dipahami. Memecah masalah menjadi bagian-bagian yang lebih kecil berarti setiap bagian dapat diperiksa lebih rinci dan dipecahkan dengan lebih mudah. Misalnya, jika seorang siswa ingin robotnya bergerak dalam kotak, mereka perlu memecahnya menjadi perintah-perintah yang lebih kecil. Penyempurnaan proses pemecahan penting untuk dipraktikkan oleh siswa, karena mereka mungkin tidak memecah perintah menjadi komponen yang lebih kecil pada awalnya:
| Bergerak dalam rincian persegi 1 | Bergerak dalam rincian persegi 2 | Bergerak dalam rincian persegi 3 |
|---|---|---|
|
|
|
Pengurutan
Urutan adalah urutan spesifik di mana perilaku dilakukan. Suatu tindakan atau kejadian mengarah ke tindakan berikutnya yang berurutan. Pengurutan penting agar siswa dapat memprogram robot mereka untuk melakukan tugas dengan benar.
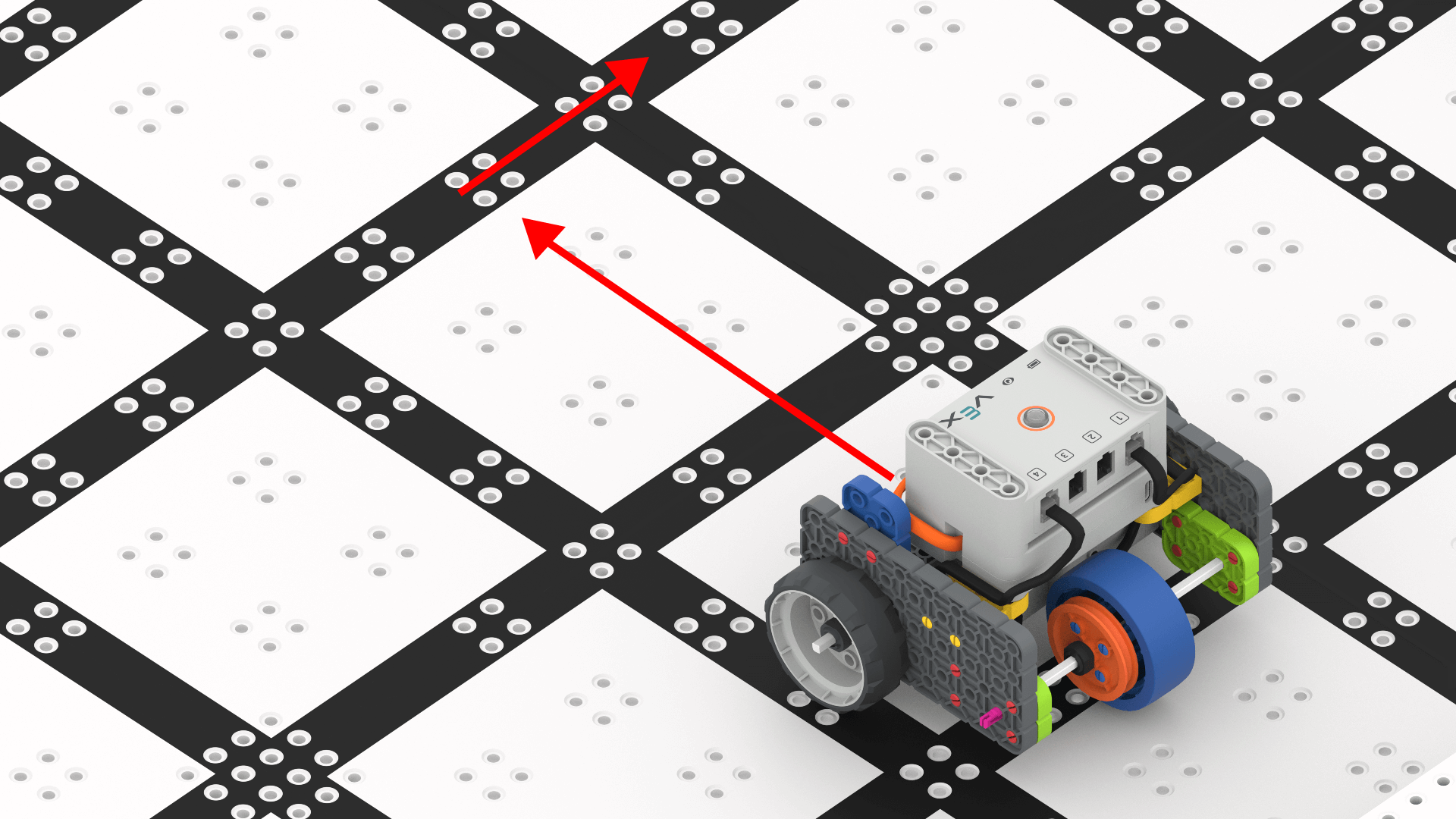
Siswa akan memprogram robot Basis Kode mereka untuk menyelesaikan berbagai tugas yang meniru pekerjaan autentik yang dilakukan robot. Mereka perlu mengurutkan perintah dalam program mereka sehingga robot Basis Kode mereka bergerak maju, mundur, kiri, dan kanan dalam urutan yang benar untuk menavigasi tantangan.
- Bergerak maju
- Belok kanan
- Bergerak maju
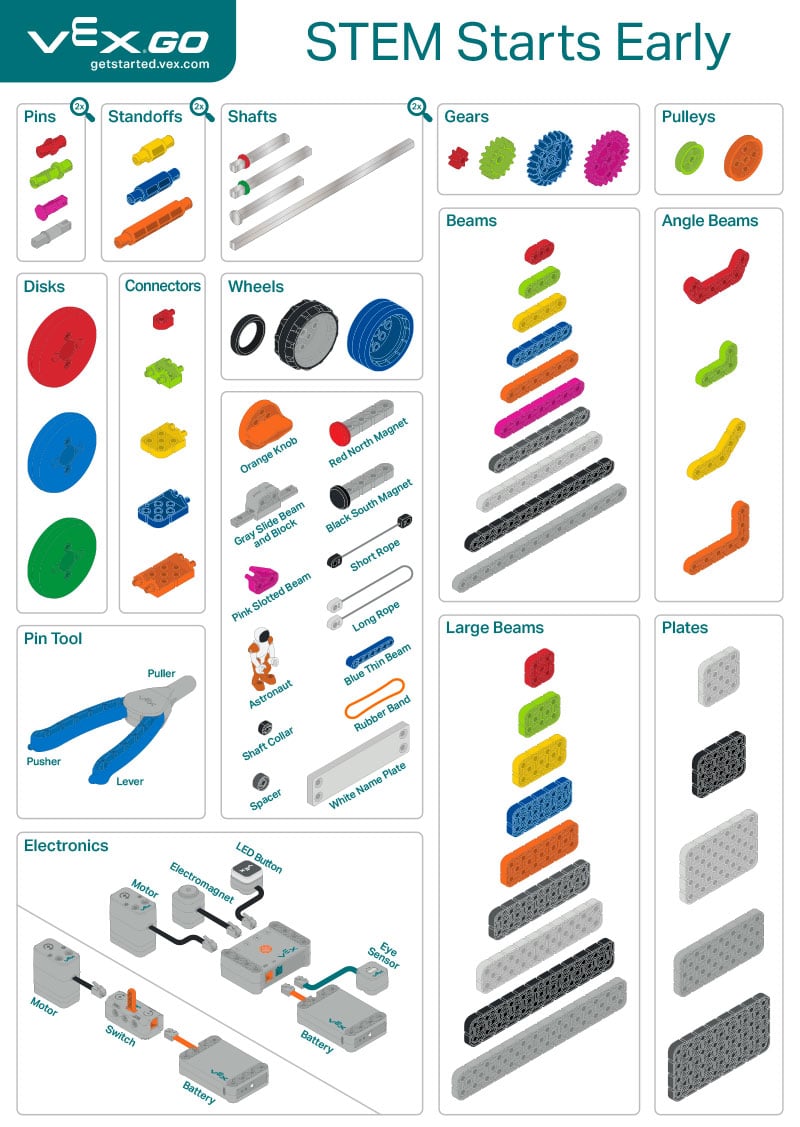
Potongan VEX GO
Potongan-potongan VEX GO berikut adalah bagian penting dari pembuatan robot Basis Kode. Poster VEX GO mengilustrasikan semua bagian VEX GO dan mengaturnya berdasarkan fungsinya dalam suatu bangunan. Informasi selengkapnya tentang bagian-bagian VEX GO dapat ditemukan dalam artikel Bagian dalam Kit VEX GO Pustaka VEX.
Elektronik
Komponen elektronik digunakan untuk memberi daya dan mengendalikan fungsi pembuatan VEX GO.
Baterai penting untuk setiap perakitan VEX GO yang menyertakan komponen elektronik. Baterai menyediakan daya ke komponen elektronik VEX GO.
Brain sangat penting untuk setiap pembangunan VEX GO yang dimulai oleh proyek VEXcode GO. Otak mengeksekusi proyek pengguna dan mengendalikan perangkat yang terhubung ke Otak.
Motor mengubah energi menjadi gerakan yang dapat digunakan dalam suatu bangunan. Motor dapat dihubungkan ke Otak dan dikontrol oleh proyek VEXcode GO.