
In questa unità di codifica, gli studenti impareranno come lavorare con VEXcode GO e il robot Code Base per risolvere autentiche sfide per i robot di codifica sul posto di lavoro. Gli studenti impareranno come pianificare, creare e avviare progetti VEXcode GO con il robot Code Base sulla base di quattro scenari del mondo reale.
Che tipi di lavoro svolgono i robot?
I robot possono svolgere lavori troppo sporchi, noiosi o pericolosi per gli esseri umani. Inoltre, molti di questi lavori non sono ben pagati. Ad esempio, gli esseri umani mettono a rischio la propria vita quando svolgono compiti come combattere gli incendi o immergersi nelle profondità dell’oceano. I robot hanno l’hardware per essere in grado di resistere in questi tipi di ambienti, rendendoli la scelta più adatta e più sicura. Le industrie implementano i robot sul posto di lavoro per svolgere questi lavori sporchi, noiosi o pericolosi per proteggere le persone, liberando allo stesso tempo le risorse umane per lavorare su processi più complessi o interattivi. Gli esseri umani hanno ancora molto da fare se i robot svolgono questi lavori sporchi, pericolosi e noiosi. I progressi tecnologici hanno portato cambiamenti nella storia dell’industria. I robot non sono diversi.

Ogni lezione di questa unità indaga uno scenario reale in cui i robot svolgono lavori sporchi, pericolosi e noiosi in vari settori. Gli studenti possono risolvere problemi innovativi creando soluzioni alle sfide della vita reale, ad esempio come programmare i robot per eseguire compiti sporchi, noiosi e pericolosi. Durante l'utilizzo dei kit VEX GO, gli studenti analizzeranno le capacità di movimento del robot Code Base utilizzando VEXcode GO e utilizzeranno queste conoscenze per fare brainstorming su diversi lavori, scenari o problemi che possono essere risolti utilizzando il robot Code Base.
Lavori sporchi
I lavori sporchi sono lavori antigenici o pericolosi che possono avere un impatto sulla salute umana. I robot possono svolgere questi lavori sfavorevoli e limitare l’esposizione umana a condizioni antigeniche.
I robot sono stati implementati in lavori sporchi come l’esplorazione mineraria e la ricognizione delle fogne. Quando si verifica un problema con una tubazione fognaria, una squadra la chiude, scava per accedere alla tubazione e quindi ripara l'infrastruttura. Ma un robot può pulire, mappare e ispezionare i tubi prima che si verifichino problemi.
Lavori noiosi
I lavori che richiedono funzioni ripetitive richiedono poco pensiero umano sono considerati noiosi. Spesso includono processi che hanno come unico obiettivo l'efficienza e il rendimento. I robot possono lavorare 24 ore su 24 per semplificare i lavori noiosi, liberando capitale umano per compiti che hanno un elemento di varietà e necessitano di pensiero critico.

Ad esempio, con la crescita dell'e-commerce, c'è una crescente necessità di centri logistici. I robot aumentano i tempi di consegna dell’ordine, riducono gli errori e minimizzano il carico sui lavoratori umani.
Lavori pericolosi
I lavori pericolosi mettono gli esseri umani in situazioni dannose. I robot possono essere utilizzati in questi lavori per prevenire lesioni. I robot possono disinnescare bombe, attraversare pianeti lontani, ispezionare strutture instabili e aiutare a combattere gli incendi. I robot non eliminano necessariamente gli esseri umani dall’equazione, ma possono essere programmati o controllati a distanza tenendo i lavoratori fuori dalle situazioni più pericolose.

I robot possono aiutare i vigili del fuoco a valutare gli edifici in fiamme. SmokeBot crea mappe interne che i vigili del fuoco possono utilizzare in seguito per orientarsi all'interno di un edificio in fiamme. Il robot Thermite è dotato di un tubo in grado di pompare 1.893 litri (~500 galloni) di acqua al minuto. Il robot Thermite utilizza telecamere montate, quindi può viaggiare in incendi estremamente pericolosi pur essendo controllato fino a un quarto di miglio di distanza.
Cos'è una trasmissione?
Una trasmissione consente a un robot di spostarsi in avanti, indietro, a sinistra o a destra utilizzando ruote o altri metodi.
Il robot Code Base ha una trasmissione a 2 motori perché vengono alimentati due motori (uno a sinistra e uno a destra). Anche se il robot Code Base è dotato di quattro ruote, solo due di esse sono azionate da motori. Le Ruote Blu aiutano il robot Code Base a rimanere stabile, in modo che non cada. Potresti immaginare se il Code Base provasse a muoversi con solo due ruote? Probabilmente cadrebbe non appena si sposta in avanti o all'indietro.

Come gira il robot Code Base utilizzando una trasmissione?
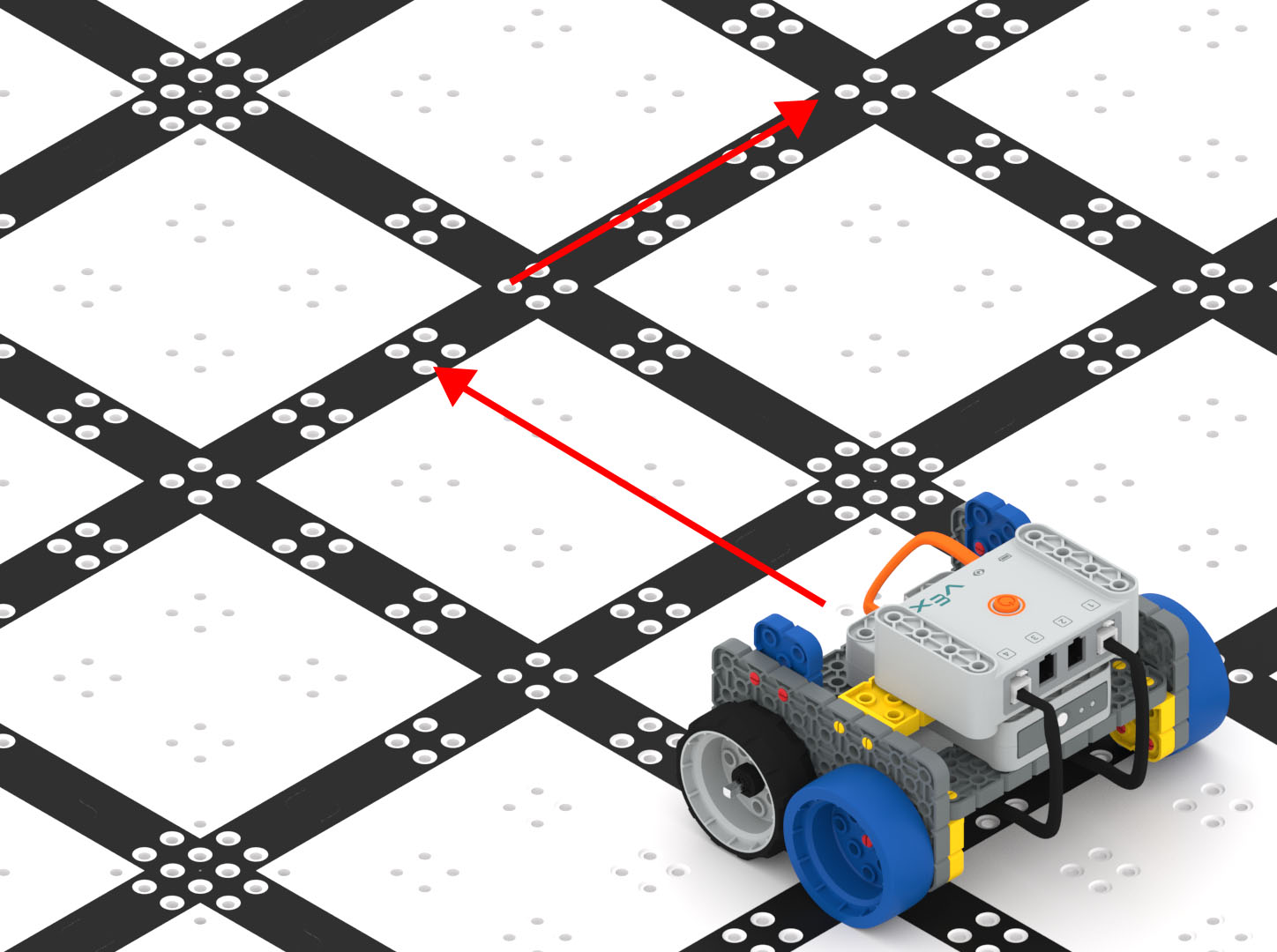
Il robot Code Base effettua svolte facendo girare le ruote in direzioni opposte. Per eseguire un giro a sinistra , la ruota anteriore sinistra del robot Code Base girerà all'indietro, mentre la ruota anteriore destra girerà in avanti.

Per eseguire un giro a destra , la ruota anteriore sinistra del robot Code Base girerà in avanti, mentre la ruota anteriore destra girerà all'indietro.

Cos'è VEXcode GO?
VEXcode GO è un ambiente di codifica utilizzato per comunicare con VEX GO Robots. Gli studenti utilizzano l'interfaccia drag and drop per creare progetti VEXcode che controllano le azioni dei loro robot. Lo scopo di ciascun blocco può essere identificato utilizzando segnali visivi come forma, colore ed etichetta.
In questa unità verranno introdotti i seguenti blocchi VEXcode:
{When started} - avvia la pila di blocchi allegata all'avvio del progetto.

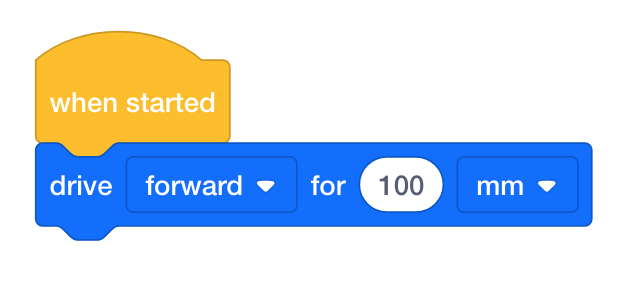
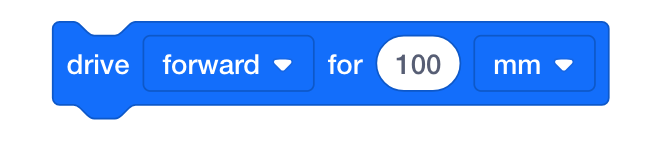
[Drive for] - sposta la trasmissione in avanti o all'indietro per una determinata distanza. Scegli in quale direzione si sposterà la trasmissione e imposta la distanza in cui si sposterà inserendo un valore nell'ovale.

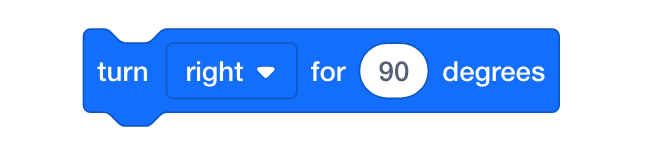
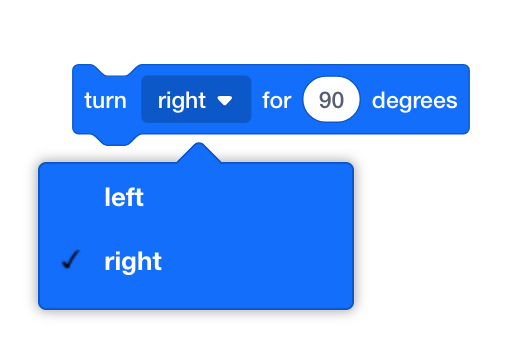
[Turn for] - ruota la trasmissione a sinistra o a destra per un determinato numero di gradi. Scegli la direzione in cui girerà la trasmissione e imposta la distanza in cui si sposterà inserendo un numero di gradi nell'ovale.
Cos'è la scomposizione e il sequenziamento nella programmazione?
Per dire a un robot in modo esatto e preciso come muoversi, sono necessari sia la scomposizione che il sequenziamento. Innanzitutto, il problema, ad esempio come affrontare una sfida, verrà scomposto in incrementi e comportamenti più piccoli. Quindi, una volta identificati, questi comportamenti devono essere organizzati nella sequenza corretta. Questo è importante perché il robot si muoverà esattamente come è stato programmato.
Decomposizione
La scomposizione prevede la scomposizione di un problema complesso in comportamenti più gestibili e più facili da comprendere. Scomporre il problema in parti più piccole significa che ogni parte può essere esaminata più nel dettaglio e risolta con maggiore facilità. Ad esempio, se uno studente vuole che il suo robot si muova in un quadrato, dovrà suddividerlo in comandi più piccoli. È importante che gli studenti facciano pratica per perfezionare il processo di suddivisione, poiché all'inizio potrebbero non suddividere i comandi in componenti più piccoli:
| Muoversi in una suddivisione quadrata 1 | Muoversi secondo una suddivisione quadrata 2 | Muoversi secondo una suddivisione quadrata 3 |
|---|---|---|
|
|
|
Sequenziamento
La sequenza è l'ordine specifico in cui i comportamenti vengono eseguiti. Un'azione o un evento porta all'azione ordinata successiva in una sequenza. La sequenza è importante affinché gli studenti possano programmare i propri robot per eseguire correttamente un'attività.
Gli studenti programmeranno il loro robot Code Base per completare una serie di attività che imitano i lavori autentici eseguiti dai robot. Dovranno sequenziare i comandi nel loro programma in modo che il loro robot Code Base si muova avanti, indietro, a sinistra e a destra nell'ordine corretto per affrontare le sfide.
- Andare avanti
- Girare a destra
- Andare avanti
Pezzi VEX GO
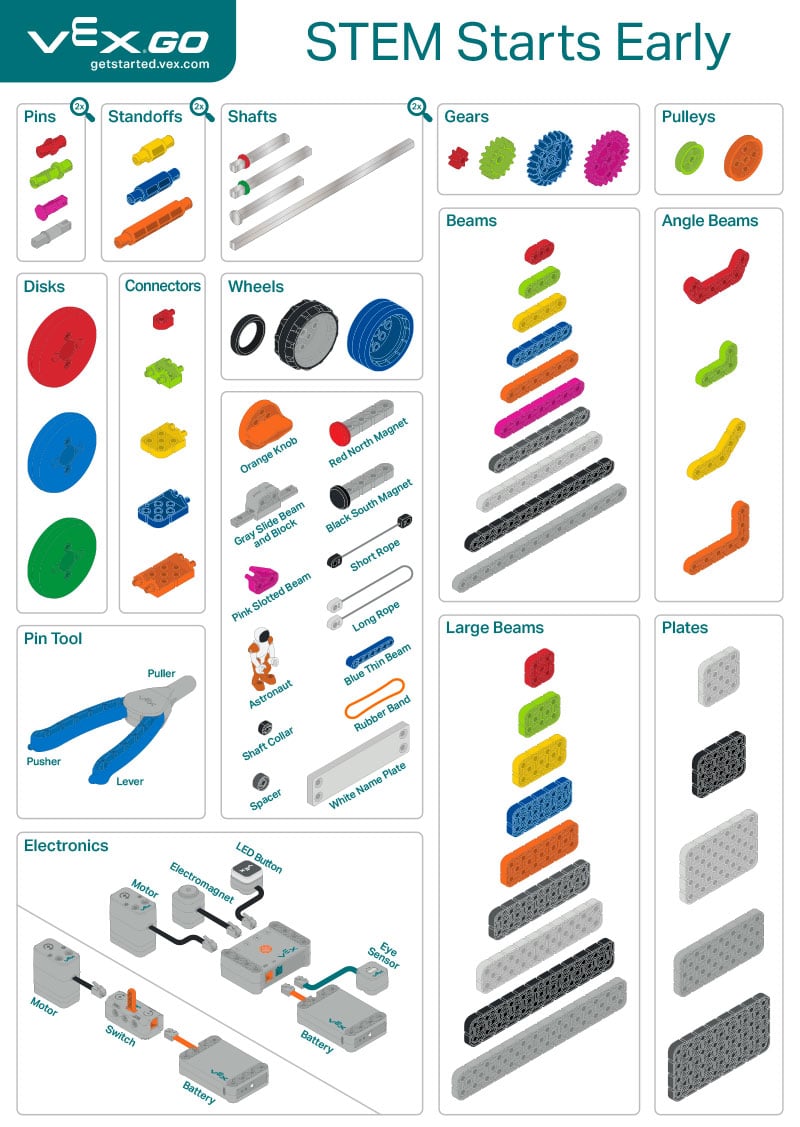
I seguenti pezzi VEX GO sono parti essenziali della costruzione del robot Code Base. Il poster VEX GO illustra tutti i pezzi VEX GO e li organizza in base alla loro funzione in una build. Maggiori informazioni sui pezzi VEX GO possono essere trovate nell'articolo Pezzi in VEX GO Kit VEX Library.
Elettronica
I componenti elettronici vengono utilizzati per alimentare e controllare le funzioni di costruzione di VEX GO.
La batteria è essenziale per qualsiasi build VEX GO che includa l'elettronica. La batteria fornisce alimentazione ai componenti elettronici VEX GO.
Brain è essenziale per qualsiasi build VEX GO avviata da un progetto VEXcode GO. Brain esegue progetti utente e controlla i dispositivi collegati a Brain.
Il Motore trasforma l'energia in movimento che può essere utilizzato in una build. Il Motore può essere collegato al Cervello e controllato da un progetto VEXcode GO.