
Lý lịch
Trong đơn vị lập trình này, học sinh sẽ học cách làm việc với VEXcode GO và robot Code Base để giải quyết những thách thức thực tế về lập trình robot tại nơi làm việc. Học sinh sẽ học cách lập kế hoạch, tạo và bắt đầu các dự án VEXcode GO bằng robot Code Base dựa trên bốn tình huống thực tế.
Robot đảm nhiệm những công việc gì?
Robot có thể làm những công việc quá bẩn, nhàm chán hoặc nguy hiểm mà con người không thể làm được. Nhiều công việc trong số này cũng không được trả lương cao. Ví dụ, con người đang đặt mạng sống của mình vào tình thế nguy hiểm khi thực hiện các nhiệm vụ như chữa cháy hoặc lặn sâu dưới đại dương. Robot có phần cứng để có thể hoạt động trong những môi trường như thế này, khiến chúng trở thành lựa chọn phù hợp và an toàn hơn. Các ngành công nghiệp triển khai robot tại nơi làm việc để thực hiện những công việc bẩn thỉu, nhàm chán hoặc nguy hiểm nhằm bảo vệ con người, đồng thời giải phóng nguồn nhân lực để làm việc trên các quy trình phức tạp hoặc tương tác hơn. Con người vẫn còn nhiều việc phải làm nếu robot đảm nhận những công việc bẩn thỉu, nguy hiểm và nhàm chán này. Những tiến bộ của công nghệ đã mang lại sự thay đổi trong suốt lịch sử của ngành công nghiệp. Robot cũng không khác gì.

Mỗi bài học trong đơn vị này sẽ nghiên cứu một tình huống thực tế trong đó robot thực hiện các công việc bẩn thỉu, nguy hiểm và nhàm chán trong nhiều ngành công nghiệp khác nhau. Học sinh có thể trở thành người giải quyết vấn đề sáng tạo bằng cách tạo ra giải pháp cho những thách thức trong cuộc sống thực, chẳng hạn như cách lập trình robot để thực hiện các nhiệm vụ bẩn thỉu, nhàm chán và nguy hiểm. Khi sử dụng Bộ VEX GO, học sinh sẽ phân tích khả năng di chuyển của robot Code Base bằng VEXcode GO và sử dụng kiến thức này để đưa ra ý tưởng về các công việc, tình huống hoặc vấn đề khác nhau có thể được giải quyết bằng robot Code Base.
Công việc bẩn thỉu
Công việc bẩn là công việc mất vệ sinh hoặc nguy hiểm có thể ảnh hưởng đến sức khỏe con người. Robot có thể thực hiện những công việc bất lợi này và hạn chế con người phải tiếp xúc với điều kiện mất vệ sinh. Xem video bên dưới để biết ví dụ về robot hoạt động trong đường hầm bẩn.
Robot đã được sử dụng trong các công việc bẩn như thăm dò mỏ và trinh sát cống rãnh. Khi có vấn đề với đường ống cống, một đội sẽ đóng đường ống lại, đào để tiếp cận đường ống, sau đó sửa chữa cơ sở hạ tầng. Nhưng robot có thể làm sạch, lập bản đồ và kiểm tra đường ống trước khi vấn đề phát sinh.
Công việc nhàm chán
Những công việc đòi hỏi chức năng lặp đi lặp lại, ít cần đến suy nghĩ của con người được coi là nhàm chán. Chúng thường bao gồm các quy trình có mục tiêu duy nhất là hiệu quả và đầu ra. Robot có thể hoạt động suốt ngày đêm để sắp xếp hợp lý các công việc nhàm chán, giải phóng nguồn nhân lực cho các nhiệm vụ có yếu tố đa dạng và đòi hỏi tư duy phản biện.

Ví dụ, với sự phát triển của thương mại điện tử, nhu cầu về các trung tâm hoàn tất đơn hàng ngày càng tăng. Robot giúp tăng thời gian từ khi đặt hàng đến khi giao hàng, giảm thiểu lỗi và giảm thiểu gánh nặng cho nhân công.
Công việc nguy hiểm
Những công việc nguy hiểm khiến con người rơi vào tình huống nguy hiểm. Robot có thể được sử dụng trong những công việc này để ngăn ngừa thương tích. Robot có thể tháo bom, di chuyển qua các hành tinh xa xôi, kiểm tra các cấu trúc không ổn định và giúp chữa cháy. Robot không nhất thiết loại bỏ con người khỏi công việc, nhưng chúng có thể được lập trình hoặc điều khiển từ xa để giúp công nhân tránh xa những tình huống nguy hiểm nhất.

Robot có thể giúp lính cứu hỏa đánh giá các tòa nhà đang cháy. SmokeBot tạo ra bản đồ bên trong mà lính cứu hỏa có thể sử dụng sau này để tìm đường đi xung quanh tòa nhà đang cháy. Robot Thermite có ống có khả năng bơm 1.893 lít (~500 gallon) nước mỗi phút. Robot Thermite sử dụng camera gắn trên tường, do đó có thể di chuyển vào các đám cháy cực kỳ nguy hiểm trong khi vẫn được điều khiển từ khoảng cách xa tới một phần tư dặm.
Hệ thống truyền động là gì?
Hệ thống truyền động cho phép robot di chuyển về phía trước, lùi, sang trái hoặc sang phải bằng bánh xe hoặc các phương pháp khác.
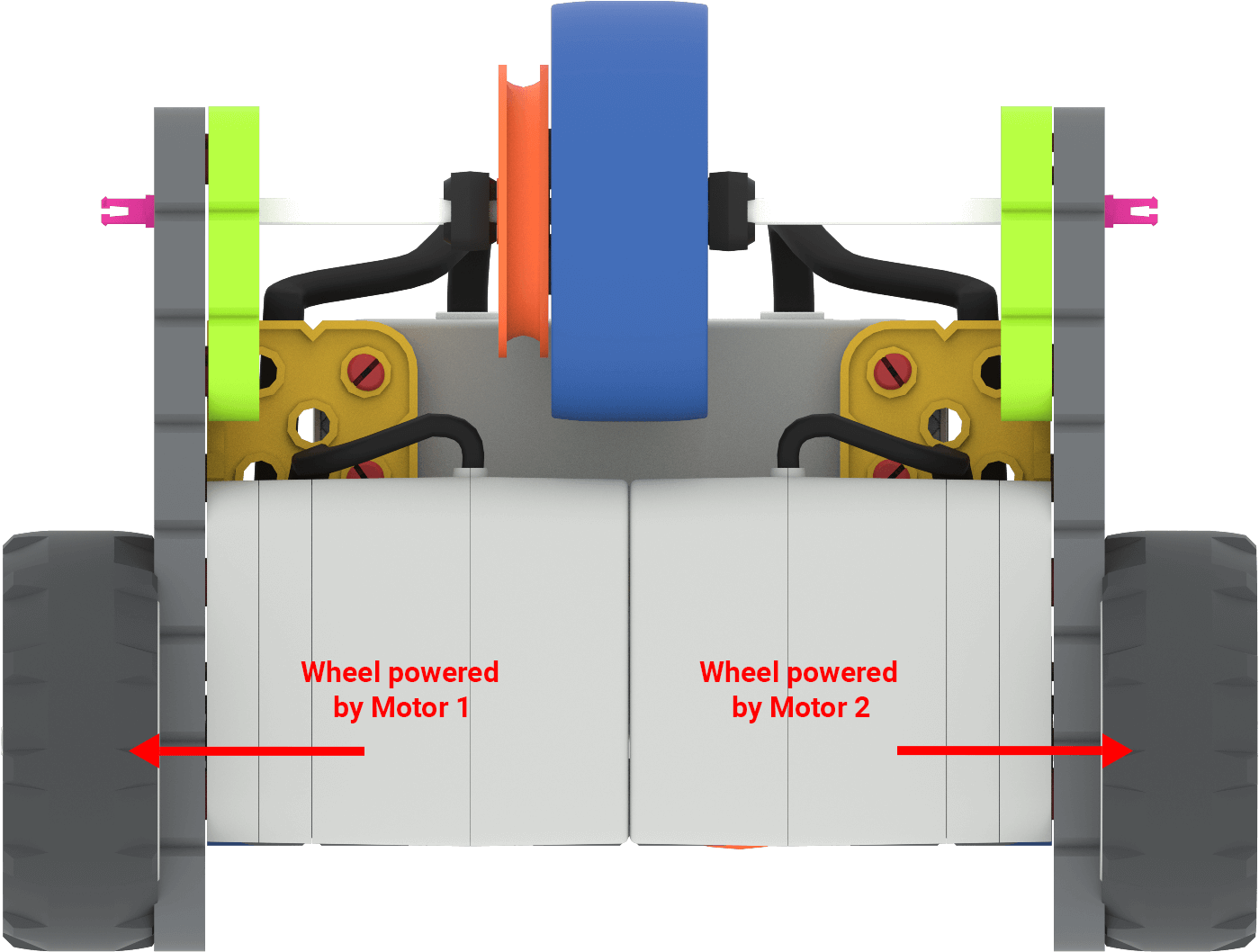
Robot Code Base có hệ thống truyền động 2 động cơ vì có hai động cơ (một ở bên trái và một ở bên phải) được cung cấp năng lượng. Mặc dù robot Code Base có bốn bánh xe, nhưng chỉ có hai bánh được cung cấp năng lượng bằng động cơ. Bánh xe màu xanh giúp robot Code Base giữ được thăng bằng, tránh bị đổ. Bạn có thể tưởng tượng nếu Căn cứ Mã cố gắng di chuyển chỉ bằng hai bánh xe không? Nó có thể bị đổ ngay khi tiến về phía trước hoặc lùi về phía sau.
Robot Code Base quay bằng hệ thống truyền động như thế nào?
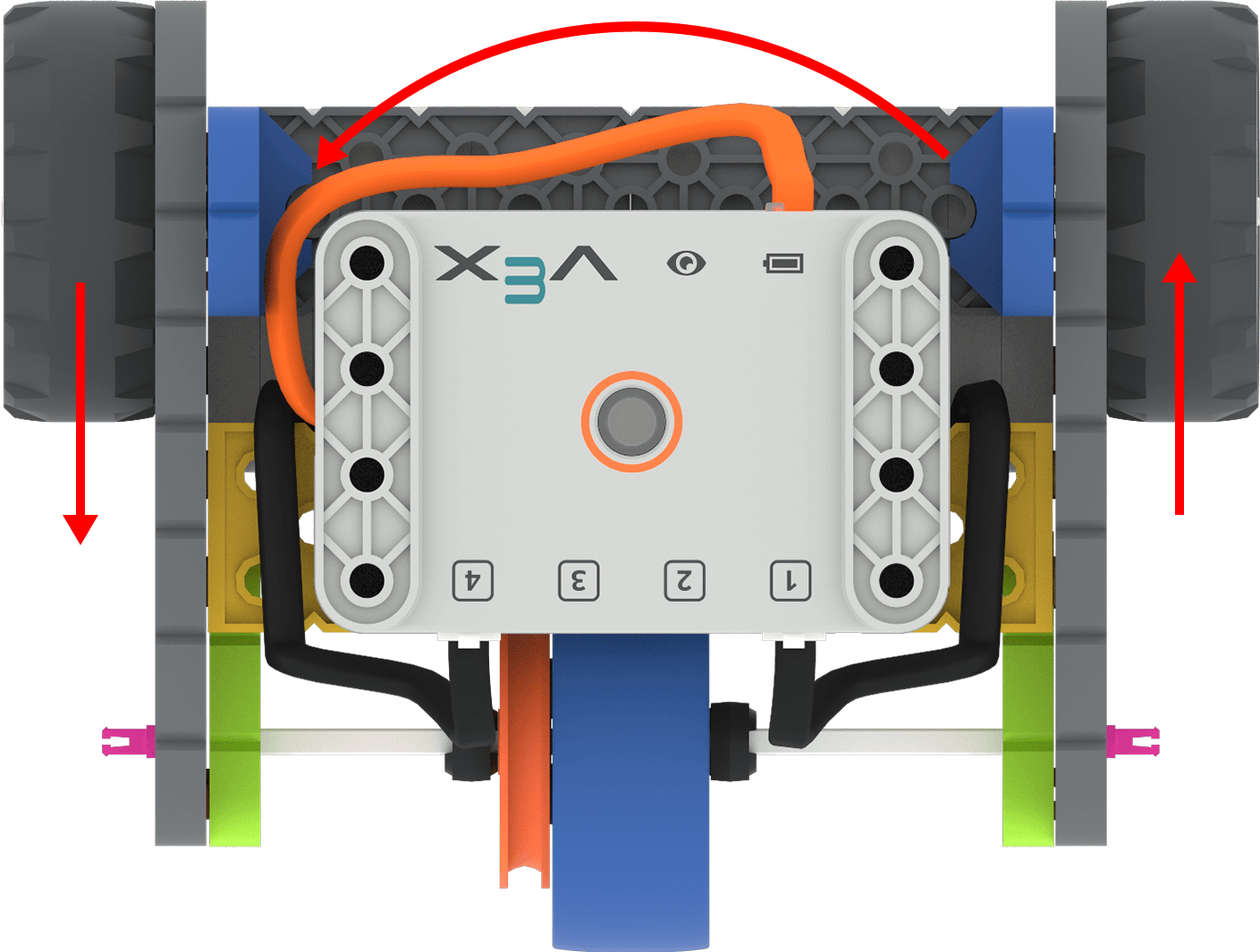
Robot Code Base rẽ bằng cách quay bánh xe theo hướng ngược nhau. Để thực hiện cú rẽ trái , bánh trước bên trái của robot Code Base sẽ quay ngược lại, trong khi bánh trước bên phải sẽ quay về phía trước.
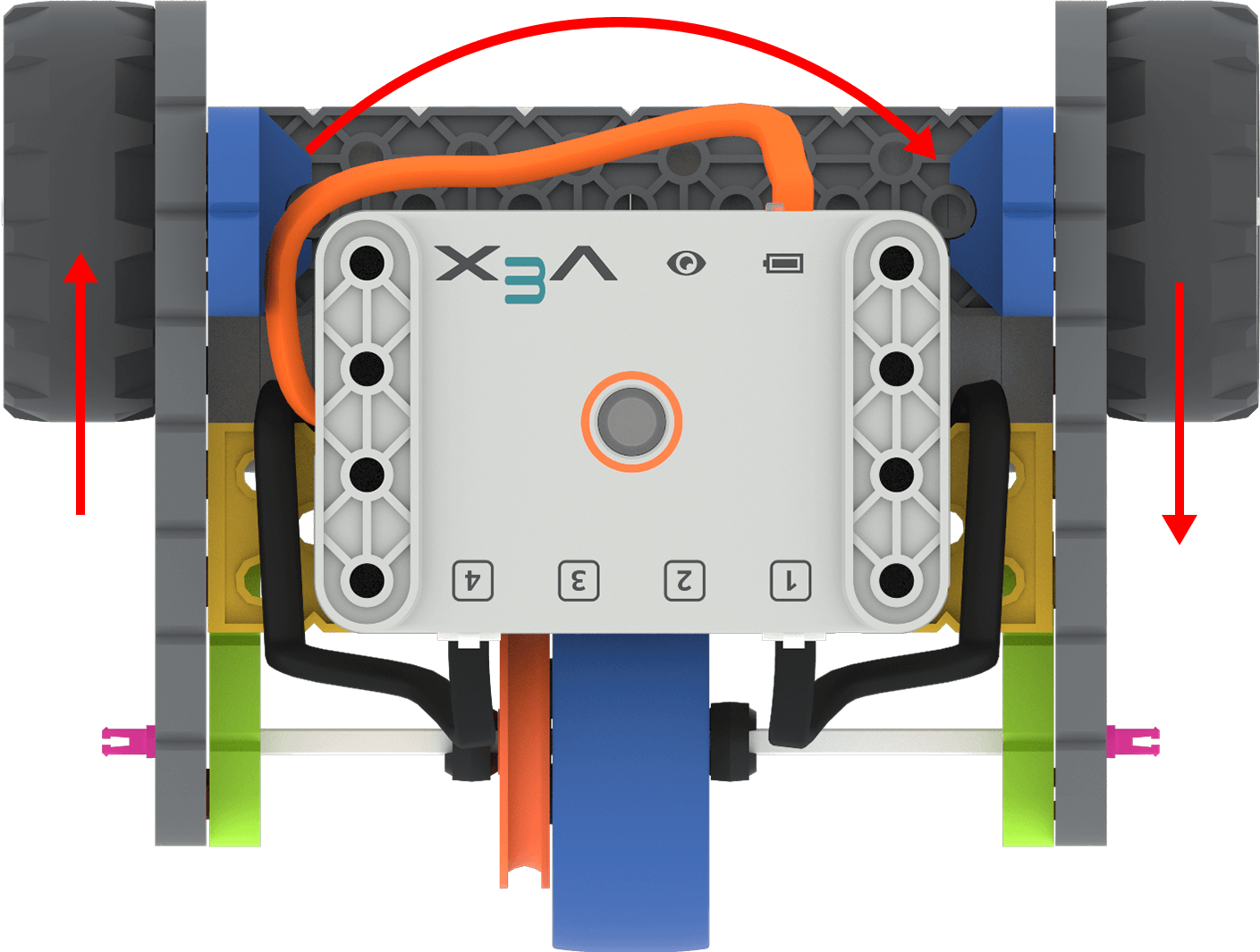
Để thực hiện cú rẽ phải , bánh trước bên trái của robot Code Base sẽ quay về phía trước, trong khi bánh trước bên phải sẽ quay về phía sau.
VEXcode GO là gì?
VEXcode GO là môi trường lập trình được sử dụng để giao tiếp với Robot VEX GO. Học sinh sử dụng giao diện kéo và thả để tạo các dự án VEXcode nhằm điều khiển hành động của robot. Mục đích của mỗi khối có thể được xác định bằng các tín hiệu trực quan như hình dạng , màu sắc và nhãn.
Các khối VEXcode sau đây sẽ được giới thiệu trong đơn vị này:
{When started} - bắt đầu chồng khối được đính kèm khi dự án bắt đầu.
 |
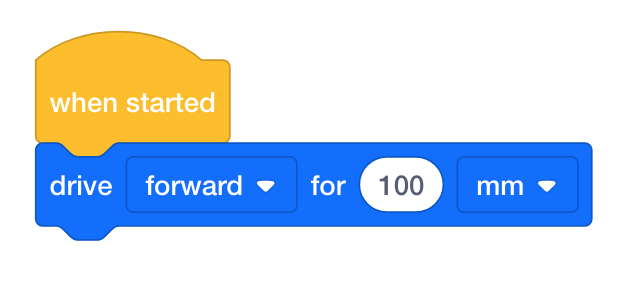 |
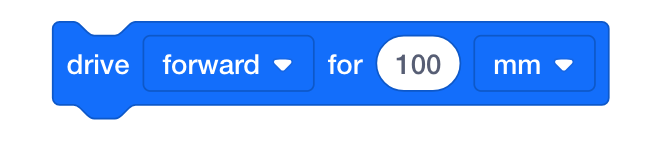
[Lái xe cho] - di chuyển Hệ thống truyền động về phía trước hoặc lùi lại trong một khoảng cách nhất định. Chọn hướng mà Hệ thống truyền động sẽ di chuyển và thiết lập khoảng cách di chuyển bằng cách nhập giá trị vào hình bầu dục.
 |
 |
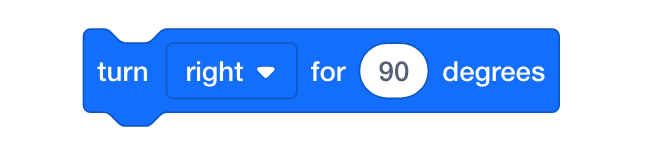
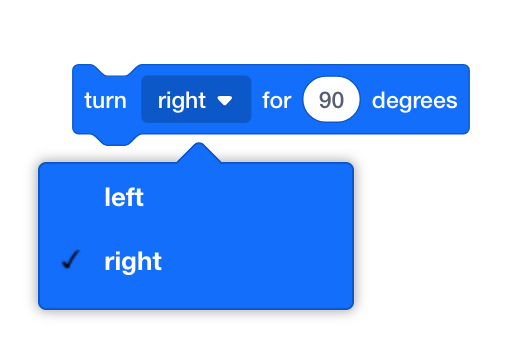
[Xoay] - xoay Hệ thống truyền động sang trái hoặc phải theo một số độ nhất định. Chọn hướng mà hệ thống truyền động sẽ quay và thiết lập khoảng cách mà nó sẽ di chuyển bằng cách nhập số độ vào hình bầu dục.
 |
 |
Phân tích và sắp xếp trong lập trình là gì?
Để chỉ cho robot cách di chuyển chính xác và tỉ mỉ, cần phải có cả phân tích và sắp xếp. Đầu tiên, vấn đề, chẳng hạn như cách giải quyết thử thách, sẽ được chia nhỏ thành các phần và hành vi nhỏ hơn. Sau khi xác định được những hành vi này, chúng cần được sắp xếp theo đúng trình tự. Điều này rất quan trọng vì robot sẽ chỉ di chuyển chính xác theo đúng cách được lập trình.
Sự phân hủy
Phân tích bao gồm việc chia nhỏ một vấn đề phức tạp thành các hành vi dễ quản lý và dễ hiểu hơn. Chia nhỏ vấn đề thành các phần nhỏ hơn có nghĩa là mỗi phần có thể được xem xét chi tiết hơn và giải quyết dễ dàng hơn. Ví dụ, nếu một học sinh muốn robot của mình di chuyển theo hình vuông, các em sẽ cần chia nhỏ lệnh đó thành những lệnh nhỏ hơn. Việc tinh chỉnh quá trình phân tích là rất quan trọng để học sinh thực hành, vì lúc đầu các em có thể không phân tích được các lệnh thành các thành phần nhỏ hơn:
| Di chuyển theo sự phân tích hình vuông 1 | Di chuyển theo hình vuông phân tích 2 | Di chuyển theo hình vuông phân tích 3 |
|---|---|---|
|
|
|
Trình tự
Trình tự là thứ tự cụ thể mà các hành vi được thực hiện. Một hành động hoặc sự kiện dẫn đến hành động tiếp theo theo trình tự. Việc sắp xếp rất quan trọng để học sinh có thể lập trình cho robot của mình thực hiện đúng nhiệm vụ.
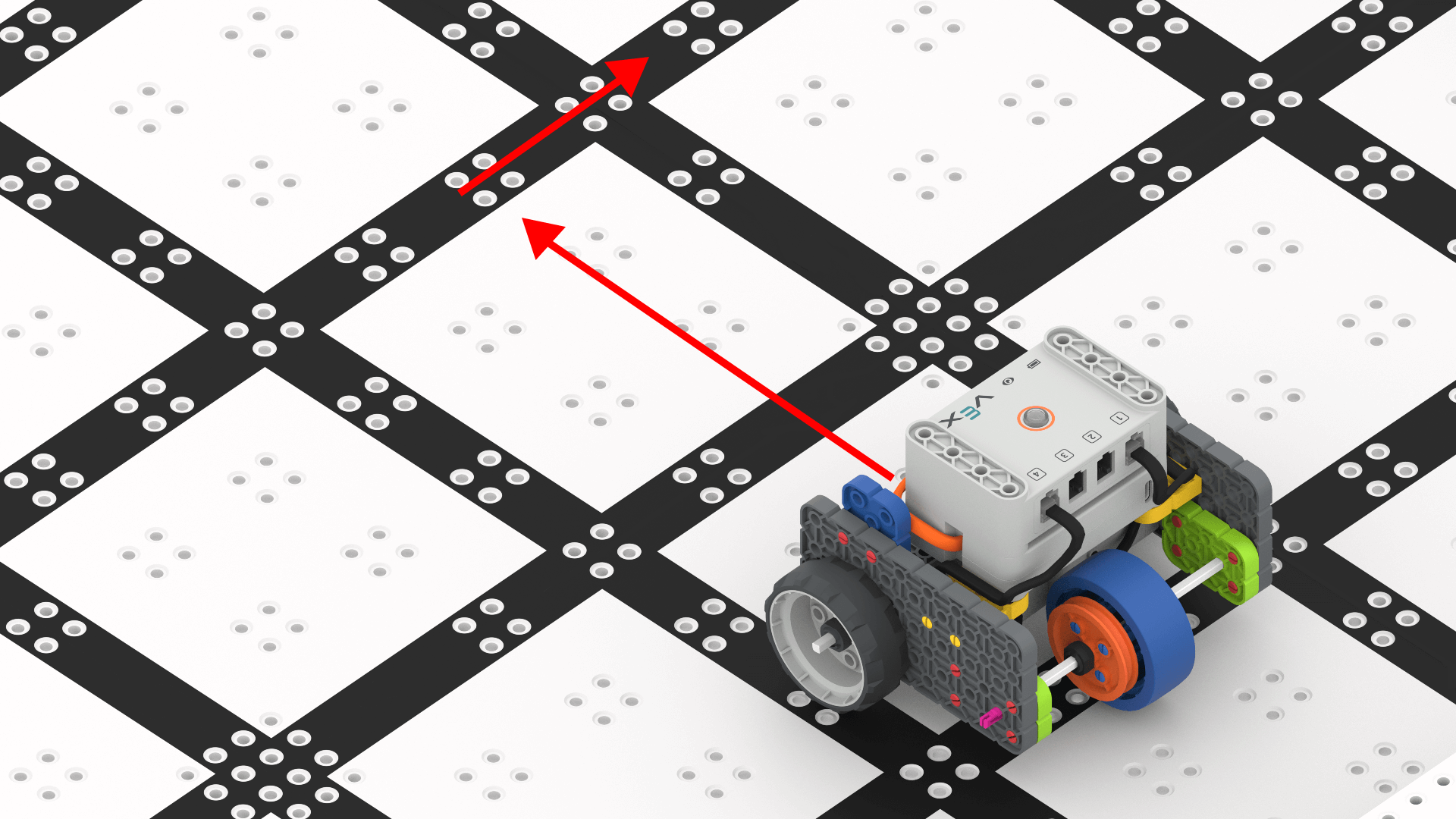
Học sinh sẽ lập trình robot Code Base của mình để hoàn thành nhiều nhiệm vụ khác nhau mô phỏng các công việc thực tế mà robot thực hiện. Họ sẽ cần sắp xếp các lệnh trong chương trình của mình để robot Code Base có thể di chuyển về phía trước, phía sau, bên trái và bên phải theo đúng thứ tự để vượt qua các thử thách.
- Tiến về phía trước
- Rẽ phải
- Tiến về phía trước
Các mảnh VEX GO
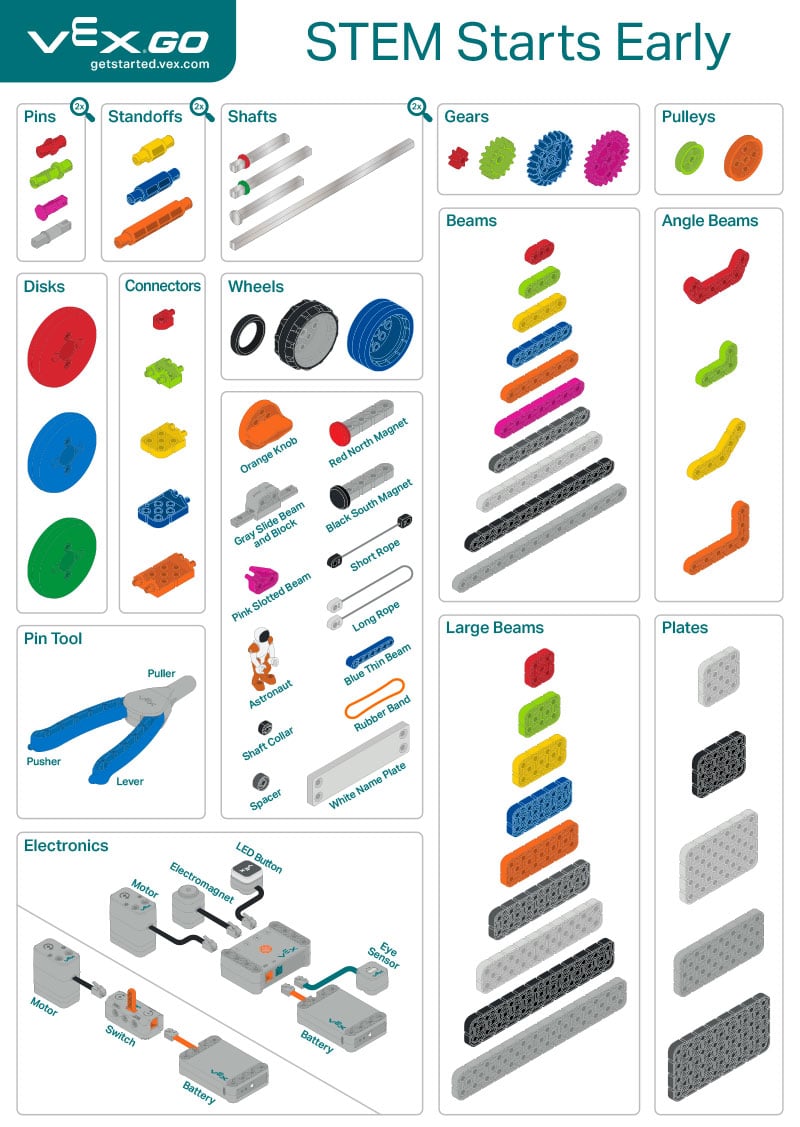
Các bộ phận VEX GO sau đây là những bộ phận thiết yếu của robot Code Base. Áp phích VEX GO minh họa tất cả các bộ phận của VEX GO và sắp xếp chúng theo chức năng trong một bản dựng. Bạn có thể tìm hiểu thêm thông tin về các bộ phận VEX GO trong bài viết Bộ phận trong Bộ VEX GO Thư viện VEX.
Điện tử
Các linh kiện điện tử được sử dụng để cấp nguồn và điều khiển các chức năng xây dựng VEX GO.
Pin là pin thiết yếu cho bất kỳ bản dựng VEX GO nào có bao gồm thiết bị điện tử. Pin cung cấp năng lượng cho các linh kiện điện tử của VEX GO.
Brain là thành phần thiết yếu cho bất kỳ bản dựng VEX GO nào được bắt đầu bằng dự án VEXcode GO. Bộ não thực hiện các dự án của người dùng và điều khiển các thiết bị được kết nối với Bộ não.
Động cơ chuyển đổi năng lượng thành chuyển động có thể được sử dụng trong quá trình xây dựng. Động cơ có thể được kết nối với Não và được điều khiển bằng dự án VEXcode GO.