
Nesta unidade de codificação, os alunos aprenderão a trabalhar com o VEXcode GO e o robô Code Base para resolver desafios autênticos de codificação de robôs no local de trabalho. Os alunos aprenderão a planejar, criar e iniciar projetos VEXcode GO com o robô Code Base com base em quatro cenários do mundo real.
Que tipos de trabalhos os robôs fazem?
Os robôs podem fazer trabalhos que são muito sujos, maçantes ou perigosos para os humanos. Muitos desses trabalhos também não pagam bem. Por exemplo, os seres humanos estão colocando suas vidas em risco ao realizar tarefas como combater incêndios ou mergulhar nas profundezas do oceano. Os robôs têm o hardware para poder sustentar esses tipos de ambientes, tornando-os a escolha mais adequada e segura. As indústrias implementam robôs no local de trabalho para fazer esses trabalhos sujos, maçantes ou perigosos para proteger as pessoas, ao mesmo tempo em que liberam recursos humanos para trabalhar em processos mais complexos ou interativos. Os humanos ainda têm muito o que fazer se os robôs assumirem esses trabalhos sujos, perigosos e chatos. Os avanços tecnológicos trouxeram mudanças ao longo da história da indústria. Os robôs não são diferentes.

Cada lição desta unidade investiga um cenário do mundo real em que os robôs realizam trabalhos sujos, perigosos e maçantes em vários setores. Os alunos podem ser solucionadores de problemas inovadores, criando soluções para desafios da vida real, como codificar robôs para executar tarefas sujas, maçantes e perigosas. Ao usar os kits VEX GO, os alunos analisarão as capacidades de como o robô Code Base pode se mover usando o VEXcode GO e usarão esse conhecimento para debater diferentes trabalhos, cenários ou problemas que podem ser resolvidos usando o robô Code Base.
Trabalhos Sujos
Os trabalhos sujos são trabalhos insalubres ou perigosos que podem afetar a saúde humana. Os robôs podem fazer esses trabalhos desfavoráveis e limitar a exposição humana a condições insalubres.
Robôs foram implementados em trabalhos sujos, como exploração de minas e reconhecimento de esgoto. Quando há um problema com um cano de esgoto, uma equipe o desliga, escava para acessar o cano e, em seguida, corrige a infraestrutura. Mas um robô pode limpar, mapear e inspecionar tubos antes que os problemas surjam.
Trabalhos maçantes
Trabalhos que exigem funções repetitivas exigem pouco pensamento humano são considerados monótonos. Eles geralmente incluem processos que têm o único objetivo de eficiência e produção. Os robôs podem trabalhar 24 horas por dia para agilizar trabalhos chatos, o que libera capital humano para tarefas que têm um elemento de variedade e uma necessidade de pensamento crítico.
 Robô
Robô Por exemplo, com o crescimento do e-commerce, há uma necessidade crescente de centros de atendimento. Os robôs aumentam os tempos de ordem de entrega, reduzem os erros e minimizam a carga sobre os trabalhadores humanos.
Trabalhos Perigosos
Trabalhos perigosos colocam os seres humanos em situações prejudiciais. Os robôs podem ser usados nesses trabalhos para evitar lesões. Os robôs podem desarmar bombas, atravessar planetas distantes, inspecionar estruturas instáveis e ajudar a combater incêndios. Os robôs não necessariamente removem os humanos da equação, mas podem ser programados ou controlados remotamente, mantendo os trabalhadores fora das situações mais perigosas.
 Robô
Robô Os robôs podem ajudar os bombeiros a avaliar edifícios em chamas. O SmokeBot cria mapas interiores que os bombeiros podem usar mais tarde para contornar um edifício em chamas. O Robô Thermite possui uma mangueira capaz de bombear 1.893 litros (~500 galões) de água por minuto. O robô Thermite usa câmeras montadas, para que possa se deslocar em incêndios extremamente perigosos enquanto é controlado a até um quarto de milha de distância.
O que é um sistema de transmissão?
Um sistema de transmissão permite que um robô se mova para frente, para trás, para a esquerda ou para a direita usando rodas ou outros métodos.
O robô Code Base tem um sistema de transmissão de 2 motores porque existem dois motores (um à esquerda e outro à direita) que estão a ser alimentados. Embora existam quatro rodas no robô Code Base, apenas duas delas são alimentadas por motores. As Rodas Azuis ajudam o robô da Base de Código a permanecer estável, para que ele não caia. Você poderia imaginar se a Base de Código tentasse se mover com apenas duas rodas? Provavelmente cairia assim que avançasse ou retrocedesse.

Como o robô base de código gira usando um sistema de transmissão?
O robô Code Base faz curvas girando as rodas em direções opostas. Para fazer uma curva à esquerda, a roda dianteira esquerda do robô Code Base girará para trás, enquanto a roda dianteira direita girará para frente.

Para fazer uma curva à direita, a roda dianteira esquerda do robô Code Base girará para frente, enquanto a roda dianteira direita girará para trás.

O que é o VEXcode GO?
O VEXcode GO é um ambiente de codificação usado para se comunicar com os robôs VEX GO. Os alunos usam a interface de arrastar e soltar para criar projetos VEXcode que controlam as ações dos robôs. A finalidade de cada bloco pode ser identificada usando dicas visuais, como forma, cor e rótulo.
Os seguintes blocos VEXcode serão introduzidos nesta unidade:
{When started} - inicia a pilha de blocos anexada quando o projeto é iniciado.

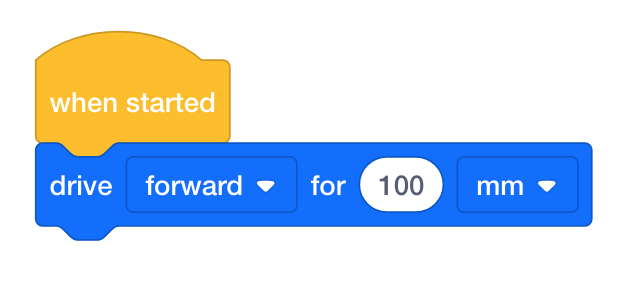
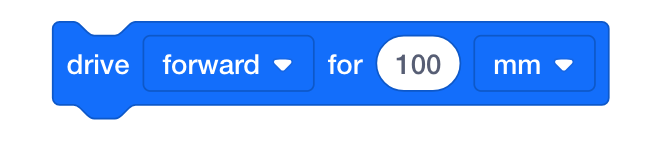
[Drive for] - move o sistema de transmissão para frente ou para trás por uma determinada distância. Escolha a direção em que o sistema de transmissão se moverá e defina até onde ele se moverá inserindo um valor no oval.

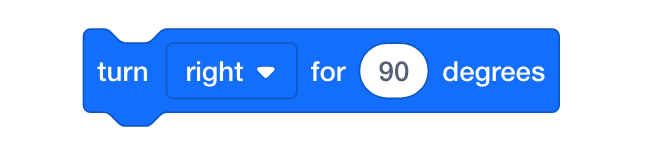
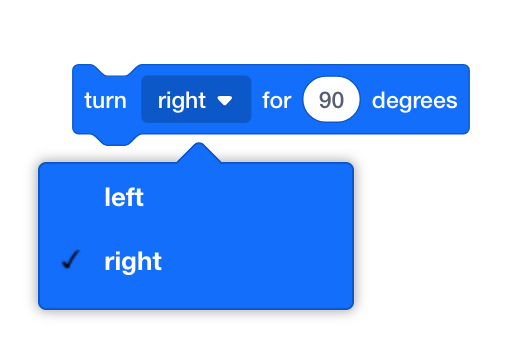
[Vire para] - gira o sistema de transmissão para a esquerda ou para a direita para um determinado número de graus. Escolha a direção em que o sistema de transmissão girará e defina até onde ele se moverá inserindo um número de graus no oval.
O que é Decomposição e Sequenciamento na Programação?
Para dizer a um robô exatamente e precisamente como se mover, tanto a decomposição quanto o sequenciamento são necessários. Primeiro, o problema, como navegar em um desafio, será decomposto em incrementos e comportamentos menores. Então, uma vez que esses comportamentos são identificados, eles precisam ser organizados na sequência correta. Isso é importante, porque o robô só se moverá exatamente como está programado.
Decomposição
A decomposição envolve dividir um problema complexo em comportamentos que são mais gerenciáveis e mais fáceis de entender. Dividir o problema em partes menores significa que cada parte pode ser examinada com mais detalhes e resolvida com maior facilidade. Por exemplo, se um aluno quiser que seu robô se mova em quadrado, ele precisará dividi-lo em comandos menores. Refinar o processo de divisão é importante para os alunos praticarem, pois eles podem não dividir os comandos em componentes menores no início:
| Mover para uma divisão quadrada 1 | Mover para uma divisão quadrada 2 | Mover para uma divisão quadrada 3 |
|---|---|---|
|
|
|
Sequenciação
O sequenciamento é a ordem específica em que os comportamentos são realizados. Uma ação ou evento leva à próxima ação ordenada numa sequência. O sequenciamento é importante para que os alunos possam programar seus robôs para executar corretamente uma tarefa.
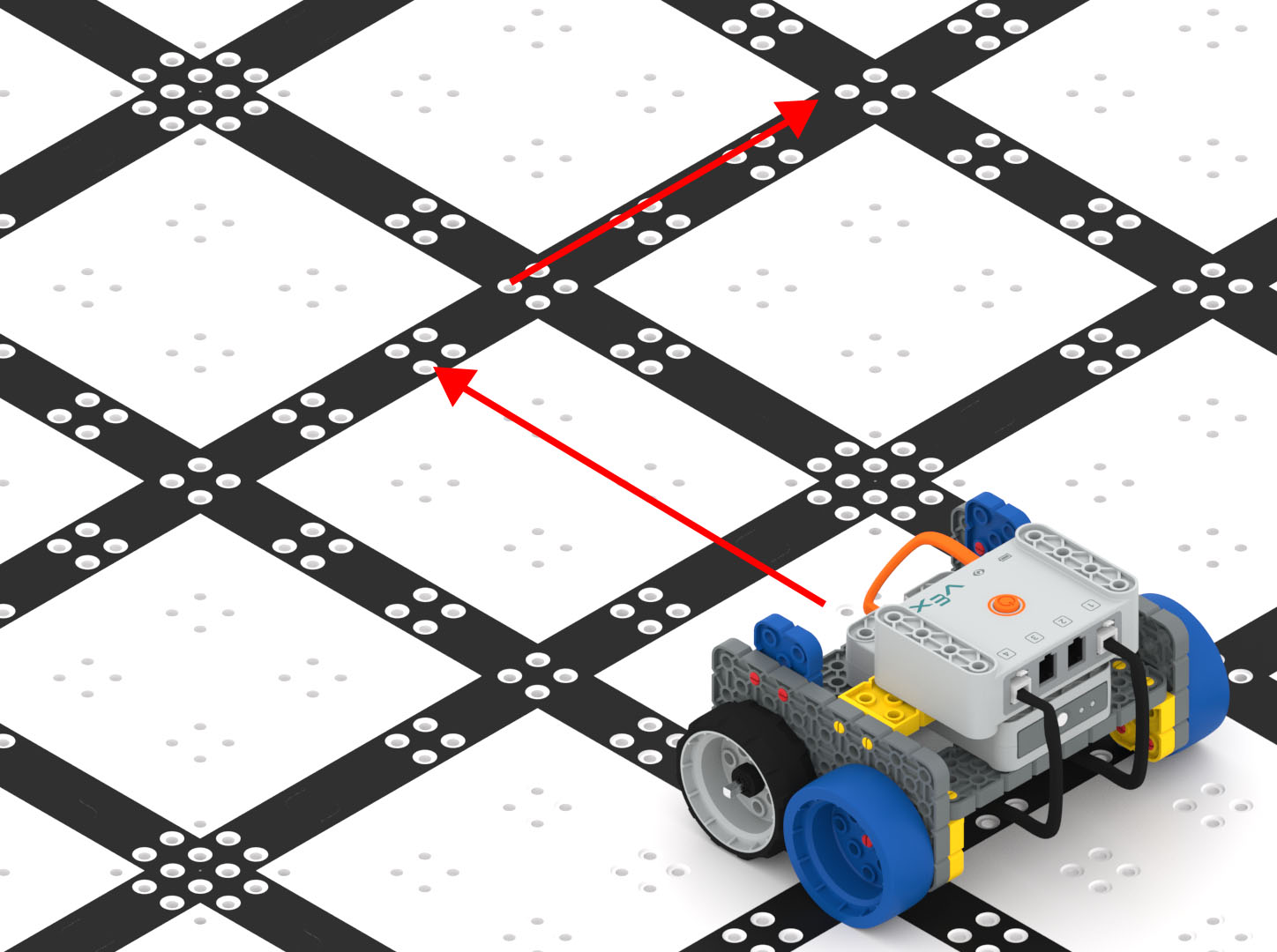
Os alunos programarão seu robô Base de Código para concluir uma variedade de tarefas que imitam os trabalhos autênticos que os robôs realizam. Eles precisarão sequenciar os comandos em seu programa para que o robô Base de Código se mova para frente, para trás, para a esquerda e para a direita na ordem correta para navegar pelos desafios.
- Seguir em frente
- Vire à direita
- Seguir em frente
Peças VEX GO
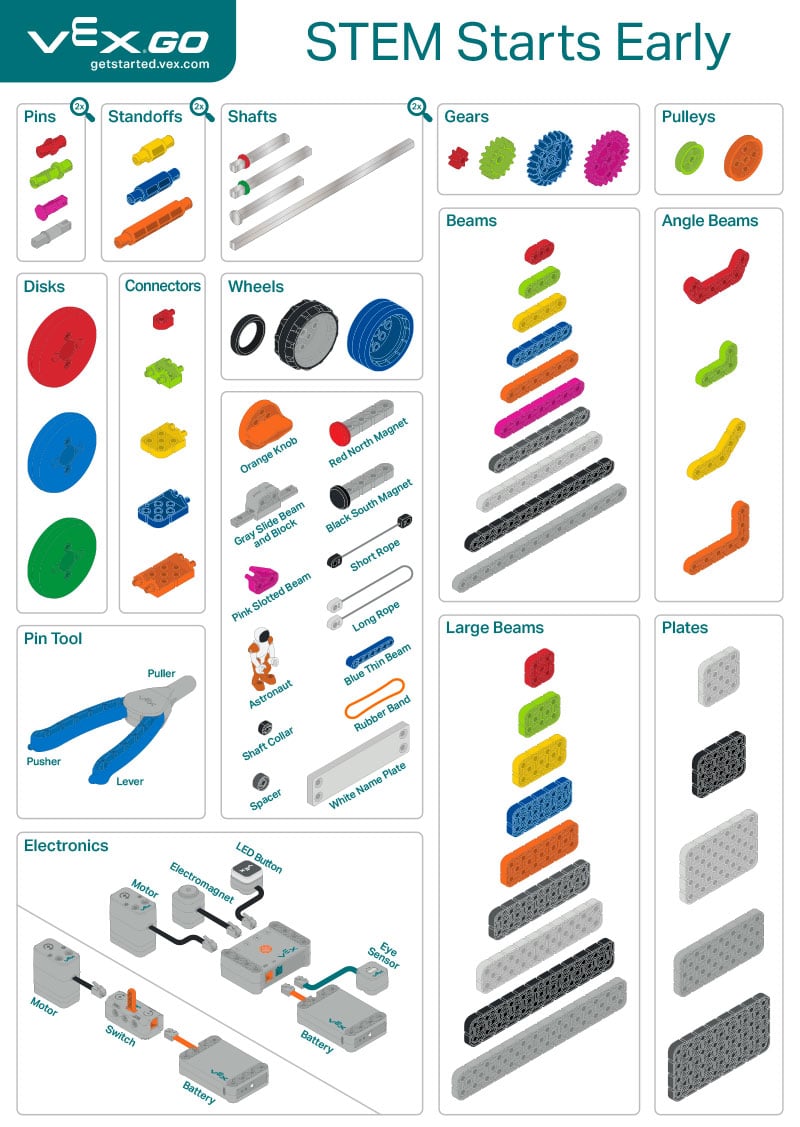
As seguintes peças VEX GO são partes essenciais da construção do robô Code Base. O Cartaz do VEX GO ilustra todas as peças do VEX GO e as organiza de acordo com sua função em uma compilação. Mais informações sobre as peças VEX GO podem ser encontradas no artigo Pieces in the VEX GO Kit VEX Library.
 Peças do Kit
Peças do Kit Eletrónica
Os componentes eletrônicos são usados para alimentar e controlar as funções de construção do VEX GO.
A bateria é essencial para qualquer construção VEX GO que inclua componentes eletrónicos. A bateria fornece energia para os componentes eletrónicos VEX GO.
O cérebro é essencial para qualquer compilação VEX GO iniciada por um projeto VEXcode GO. O Cérebro executa projetos de utilizador e controla os dispositivos ligados ao Cérebro.
O Motor transforma energia em movimento que pode ser usado em uma construção. O Motor pode ser conectado ao Cérebro e controlado por um projeto VEXcode GO.