
പശ്ചാത്തലം
ഈ കോഡിംഗ് യൂണിറ്റിൽ, ജോലിസ്ഥലത്ത് കോഡിംഗ് റോബോട്ടുകൾ നേരിടുന്ന യഥാർത്ഥ വെല്ലുവിളികൾ പരിഹരിക്കുന്നതിന് VEXcode GO, കോഡ് ബേസ് റോബോട്ടുകൾ എന്നിവയുമായി എങ്ങനെ പ്രവർത്തിക്കാമെന്ന് വിദ്യാർത്ഥികൾ പഠിക്കും. നാല് യഥാർത്ഥ ലോക സാഹചര്യങ്ങളെ അടിസ്ഥാനമാക്കി കോഡ് ബേസ് റോബോട്ട് ഉപയോഗിച്ച് VEXcode GO പ്രോജക്ടുകൾ എങ്ങനെ ആസൂത്രണം ചെയ്യാമെന്നും സൃഷ്ടിക്കാമെന്നും ആരംഭിക്കാമെന്നും വിദ്യാർത്ഥികൾ പഠിക്കും.
റോബോട്ടുകൾ എന്തെല്ലാം ജോലികളാണ് ചെയ്യുന്നത്?
മനുഷ്യർക്ക് ചെയ്യാൻ കഴിയാത്തത്ര വൃത്തികെട്ടതോ, മുഷിഞ്ഞതോ, അപകടകരമോ ആയ ജോലികൾ റോബോട്ടുകൾക്ക് ചെയ്യാൻ കഴിയും. ഈ ജോലികളിൽ പലതിനും നല്ല ശമ്പളം ലഭിക്കുന്നില്ല. ഉദാഹരണത്തിന്, തീ കെടുത്തുകയോ സമുദ്രത്തിൽ ആഴത്തിൽ മുങ്ങുകയോ പോലുള്ള ജോലികൾ ചെയ്യുമ്പോൾ മനുഷ്യർ തങ്ങളുടെ ജീവൻ അപകടത്തിലാക്കുന്നു. ഇത്തരം പരിതസ്ഥിതികളിൽ നിലനിൽക്കാൻ ആവശ്യമായ ഹാർഡ്വെയർ റോബോട്ടുകൾക്കുണ്ട്, ഇത് അവയെ കൂടുതൽ അനുയോജ്യവും സുരക്ഷിതവുമായ തിരഞ്ഞെടുപ്പാക്കി മാറ്റുന്നു. ആളുകളെ സംരക്ഷിക്കുന്നതിനായി വൃത്തികെട്ടതും മുഷിഞ്ഞതും അപകടകരവുമായ ഈ ജോലികൾ ചെയ്യുന്നതിനായി വ്യവസായങ്ങൾ ജോലിസ്ഥലത്ത് റോബോട്ടുകളെ നടപ്പിലാക്കുന്നു, അതേസമയം കൂടുതൽ സങ്കീർണ്ണമായ അല്ലെങ്കിൽ സംവേദനാത്മക പ്രക്രിയകളിൽ പ്രവർത്തിക്കാൻ മനുഷ്യവിഭവശേഷി സ്വതന്ത്രമാക്കുകയും ചെയ്യുന്നു. വൃത്തികെട്ടതും അപകടകരവും മുഷിഞ്ഞതുമായ ഈ ജോലികൾ റോബോട്ടുകൾ ഏറ്റെടുക്കുകയാണെങ്കിൽ മനുഷ്യർക്ക് ഇനിയും ഒരുപാട് കാര്യങ്ങൾ ചെയ്യാനുണ്ട്. വ്യവസായ ചരിത്രത്തിലുടനീളം സാങ്കേതിക പുരോഗതി മാറ്റങ്ങൾ വരുത്തിയിട്ടുണ്ട്. റോബോട്ടുകളും വ്യത്യസ്തമല്ല.

ഈ യൂണിറ്റിലെ ഓരോ പാഠവും വിവിധ വ്യവസായങ്ങളിൽ റോബോട്ടുകൾ വൃത്തികെട്ടതും അപകടകരവും മുഷിഞ്ഞതുമായ ജോലികൾ ചെയ്യുന്ന ഒരു യഥാർത്ഥ ലോക സാഹചര്യത്തെ അന്വേഷിക്കുന്നു. വൃത്തികെട്ടതും മങ്ങിയതും അപകടകരവുമായ ജോലികൾ ചെയ്യുന്നതിന് റോബോട്ടുകളെ എങ്ങനെ കോഡ് ചെയ്യാം എന്നതുപോലുള്ള യഥാർത്ഥ ജീവിതത്തിലെ വെല്ലുവിളികൾക്ക് പരിഹാരങ്ങൾ സൃഷ്ടിക്കുന്നതിലൂടെ വിദ്യാർത്ഥികൾക്ക് നൂതനമായ പ്രശ്നപരിഹാരകരാകാൻ കഴിയും. VEX GO കിറ്റുകൾ ഉപയോഗിക്കുമ്പോൾ, VEXcode GO ഉപയോഗിച്ച് കോഡ് ബേസ് റോബോട്ടിന് എങ്ങനെ നീങ്ങാൻ കഴിയുമെന്നതിന്റെ കഴിവുകൾ വിദ്യാർത്ഥികൾ വിശകലനം ചെയ്യും, കൂടാതെ കോഡ് ബേസ് റോബോട്ട് ഉപയോഗിച്ച് പരിഹരിക്കാൻ കഴിയുന്ന വ്യത്യസ്ത ജോലികൾ, സാഹചര്യങ്ങൾ അല്ലെങ്കിൽ പ്രശ്നങ്ങൾ എന്നിവയെക്കുറിച്ച് ചിന്തിക്കാൻ ഈ അറിവ് ഉപയോഗിക്കും.
വൃത്തികെട്ട ജോലികൾ
വൃത്തിഹീനമായ ജോലികൾ മനുഷ്യന്റെ ആരോഗ്യത്തെ ബാധിക്കുന്ന വൃത്തിഹീനമായതോ അപകടകരമോ ആയ ജോലികളാണ്. റോബോട്ടുകൾക്ക് ഈ പ്രതികൂലമായ ജോലികൾ ചെയ്യാനും മനുഷ്യന്റെ ശുചിത്വമില്ലാത്ത സാഹചര്യങ്ങൾ പരിമിതപ്പെടുത്താനും കഴിയും. വൃത്തിഹീനമായ ഒരു തുരങ്ക പരിസരത്ത് പ്രവർത്തിക്കുന്ന ഒരു റോബോട്ടിന്റെ ഉദാഹരണത്തിനായി താഴെയുള്ള വീഡിയോ കാണുക.
ഖനി പര്യവേക്ഷണം, അഴുക്കുചാലുകൾ പരിശോധിക്കൽ തുടങ്ങിയ വൃത്തികെട്ട ജോലികളിൽ റോബോട്ടുകളെ ഉപയോഗിച്ചിട്ടുണ്ട്. ഒരു മലിനജല പൈപ്പിൽ ഒരു പ്രശ്നമുണ്ടാകുമ്പോൾ, ഒരു സംഘം അത് അടച്ചുപൂട്ടുകയും, പൈപ്പിലേക്ക് എത്താൻ കുഴിക്കുകയും, തുടർന്ന് അടിസ്ഥാന സൗകര്യങ്ങൾ ശരിയാക്കുകയും ചെയ്യുന്നു. എന്നാൽ പ്രശ്നങ്ങൾ ഉണ്ടാകുന്നതിനുമുമ്പ് ഒരു റോബോട്ടിന് പൈപ്പുകൾ വൃത്തിയാക്കാനും, മാപ്പ് ചെയ്യാനും, പരിശോധിക്കാനും കഴിയും.
മങ്ങിയ ജോലികൾ
മനുഷ്യചിന്ത വളരെ കുറച്ച് മാത്രം ആവശ്യമുള്ള ആവർത്തിച്ചുള്ള പ്രവർത്തനങ്ങൾ ആവശ്യമുള്ള ജോലികൾ വിരസമായി കണക്കാക്കപ്പെടുന്നു. അവയിൽ പലപ്പോഴും കാര്യക്ഷമതയും ഉൽപാദനവും മാത്രമുള്ള പ്രക്രിയകൾ ഉൾപ്പെടുന്നു. മങ്ങിയ ജോലികൾ കാര്യക്ഷമമാക്കാൻ റോബോട്ടുകൾക്ക് 24 മണിക്കൂറും പ്രവർത്തിക്കാൻ കഴിയും, ഇത് വൈവിധ്യവും വിമർശനാത്മക ചിന്തയും ആവശ്യമുള്ള ജോലികൾക്കായി മനുഷ്യ മൂലധനം സ്വതന്ത്രമാക്കുന്നു.

ഉദാഹരണത്തിന്, ഇ-കൊമേഴ്സിന്റെ വളർച്ചയോടെ, പൂർത്തീകരണ കേന്ദ്രങ്ങളുടെ ആവശ്യകത വർദ്ധിച്ചുവരികയാണ്. റോബോട്ടുകൾ ഓർഡർ-ടു-ഡെലിവറി സമയം വർദ്ധിപ്പിക്കുകയും, പിശകുകൾ കുറയ്ക്കുകയും, മനുഷ്യ തൊഴിലാളികളുടെ മേലുള്ള ഭാരം കുറയ്ക്കുകയും ചെയ്യുന്നു.
അപകടകരമായ ജോലികൾ
അപകടകരമായ ജോലികൾ മനുഷ്യരെ ദോഷകരമായ സാഹചര്യങ്ങളിൽ എത്തിക്കുന്നു. പരിക്കുകൾ തടയാൻ ഈ ജോലികളിൽ റോബോട്ടുകളെ ഉപയോഗിക്കാം. റോബോട്ടുകൾക്ക് ബോംബുകൾ നിർവീര്യമാക്കാനും, വിദൂര ഗ്രഹങ്ങളിലൂടെ സഞ്ചരിക്കാനും, അസ്ഥിരമായ ഘടനകൾ പരിശോധിക്കാനും, തീപിടുത്തങ്ങളെ ചെറുക്കാനും കഴിയും. റോബോട്ടുകൾ മനുഷ്യരെ സമവാക്യത്തിൽ നിന്ന് നീക്കം ചെയ്യണമെന്നില്ല, പക്ഷേ അവയെ വിദൂരമായി പ്രോഗ്രാം ചെയ്യാനോ നിയന്ത്രിക്കാനോ കഴിയും, അതുവഴി തൊഴിലാളികളെ ഏറ്റവും അപകടകരമായ സാഹചര്യങ്ങളിൽ നിന്ന് അകറ്റി നിർത്താം.

കത്തുന്ന കെട്ടിടങ്ങൾ വിലയിരുത്താൻ അഗ്നിശമന സേനാംഗങ്ങളെ സഹായിക്കാൻ റോബോട്ടുകൾക്ക് കഴിയും. തീപിടിച്ച കെട്ടിടത്തിന് ചുറ്റും വഴി കണ്ടെത്താൻ അഗ്നിശമന സേനാംഗങ്ങൾക്ക് പിന്നീട് ഉപയോഗിക്കാൻ കഴിയുന്ന ഇന്റീരിയർ മാപ്പുകൾ സ്മോക്ക്ബോട്ട് സൃഷ്ടിക്കുന്നു. തെർമൈറ്റ് റോബോട്ടിന് മിനിറ്റിൽ 1,893 ലിറ്റർ (~500 ഗാലൺ) വെള്ളം പമ്പ് ചെയ്യാൻ കഴിയുന്ന ഒരു ഹോസ് ഉണ്ട്. തെർമൈറ്റ് റോബോട്ട് ഘടിപ്പിച്ച ക്യാമറകൾ ഉപയോഗിക്കുന്നതിനാൽ, കാൽ മൈൽ അകലെ നിന്ന് നിയന്ത്രിക്കുമ്പോൾ തന്നെ അത്യധികം അപകടകരമായ തീപിടുത്തങ്ങളിലേക്ക് സഞ്ചരിക്കാൻ ഇതിന് കഴിയും.
ഒരു ഡ്രൈവ്ട്രെയിൻ എന്താണ്?
ചക്രങ്ങളോ മറ്റ് രീതികളോ ഉപയോഗിച്ച് ഒരു റോബോട്ടിനെ മുന്നോട്ട്, പിന്നോട്ട്, ഇടത്തോട്ടോ വലത്തോട്ടോ ചലിപ്പിക്കാൻ ഡ്രൈവ്ട്രെയിൻ അനുവദിക്കുന്നു.
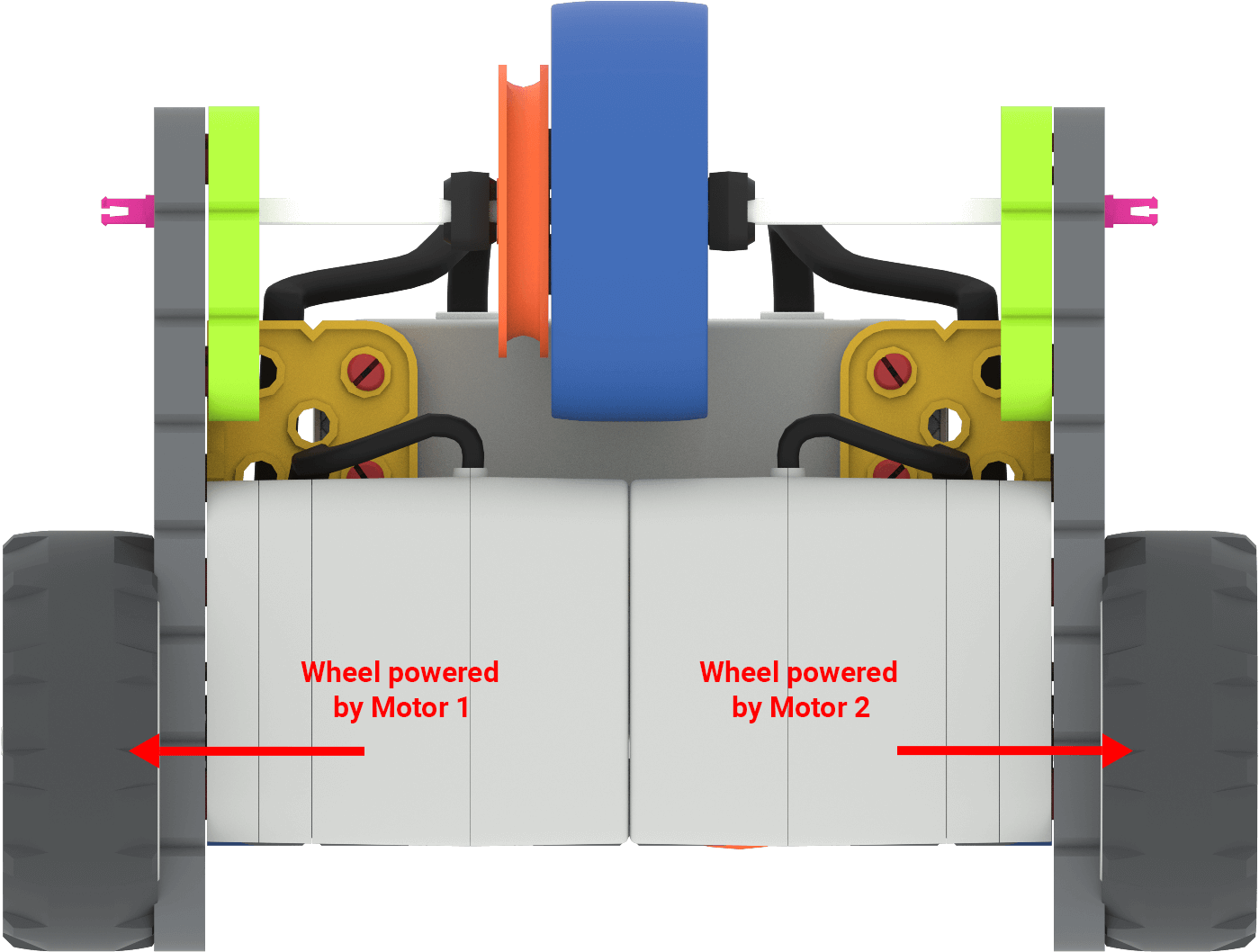
കോഡ് ബേസ് റോബോട്ടിന് 2-മോട്ടോർ ഡ്രൈവ്ട്രെയിൻ ഉണ്ട്, കാരണം രണ്ട് മോട്ടോറുകൾ (ഒന്ന് ഇടതുവശത്തും ഒന്ന് വലതുവശത്തും) പവർ ചെയ്യുന്നുണ്ട്. കോഡ് ബേസ് റോബോട്ടിന് നാല് ചക്രങ്ങളുണ്ടെങ്കിലും, അവയിൽ രണ്ടെണ്ണം മാത്രമേ മോട്ടോറുകളാൽ പ്രവർത്തിക്കൂ. കോഡ് ബേസ് റോബോട്ടിനെ സ്ഥിരതയോടെ നിലനിർത്താൻ ബ്ലൂ വീലുകൾ സഹായിക്കുന്നു, അതുവഴി അത് മറിഞ്ഞു വീഴില്ല. കോഡ് ബേസ് രണ്ട് ചക്രങ്ങൾ മാത്രം ഉപയോഗിച്ച് നീങ്ങാൻ ശ്രമിച്ചാൽ നിങ്ങൾക്ക് സങ്കൽപ്പിക്കാൻ കഴിയുമോ? അത് മുന്നോട്ടോ പിന്നോട്ടോ പോകുമ്പോൾ ഉടൻ തന്നെ മറിഞ്ഞു വീഴാൻ സാധ്യതയുണ്ട്.
ഒരു ഡ്രൈവ്ട്രെയിൻ ഉപയോഗിച്ച് കോഡ് ബേസ് റോബോട്ട് എങ്ങനെയാണ് തിരിയുന്നത്?
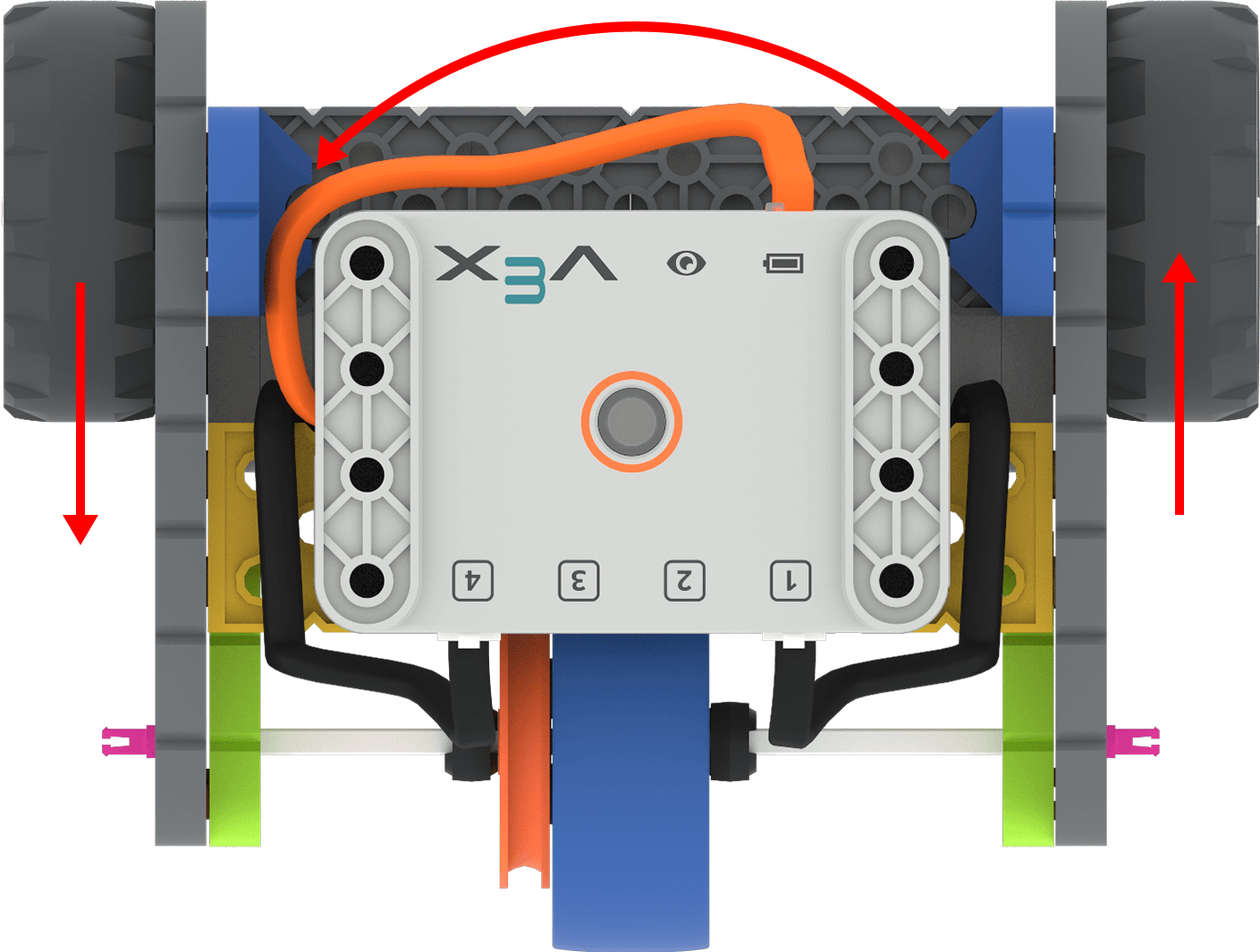
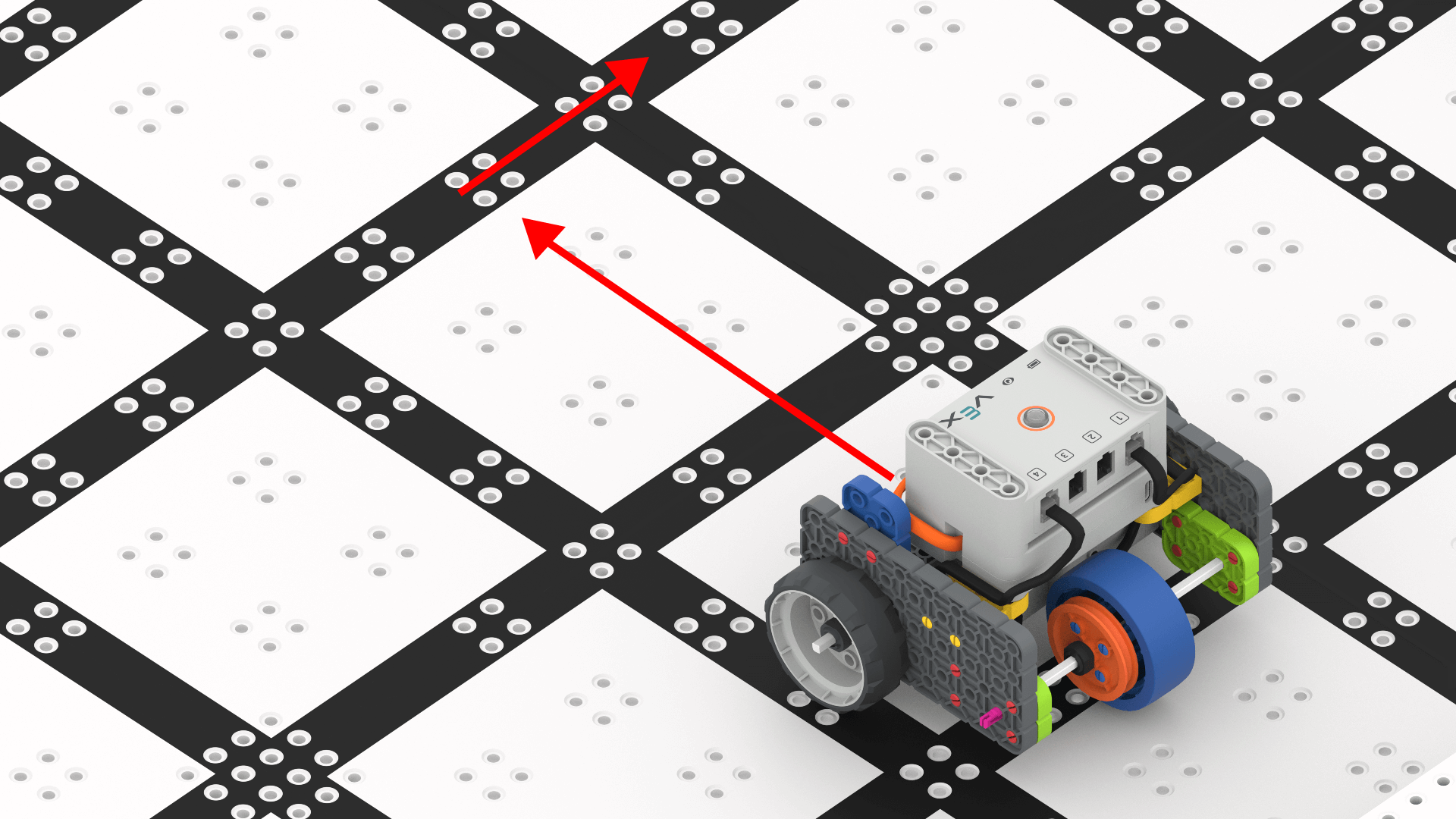
കോഡ് ബേസ് റോബോട്ട് ചക്രങ്ങൾ വിപരീത ദിശകളിലേക്ക് കറക്കി തിരിവുകൾ സൃഷ്ടിക്കുന്നു. ഇടത്തേക്ക് തിരിവ് നടത്താൻ, കോഡ് ബേസ് റോബോട്ടിന്റെ ഇടതു മുൻ ചക്രം പിന്നിലേക്ക് കറങ്ങും, അതേസമയം മുൻ വലത് ചക്രം മുന്നിലേക്ക് കറങ്ങും.
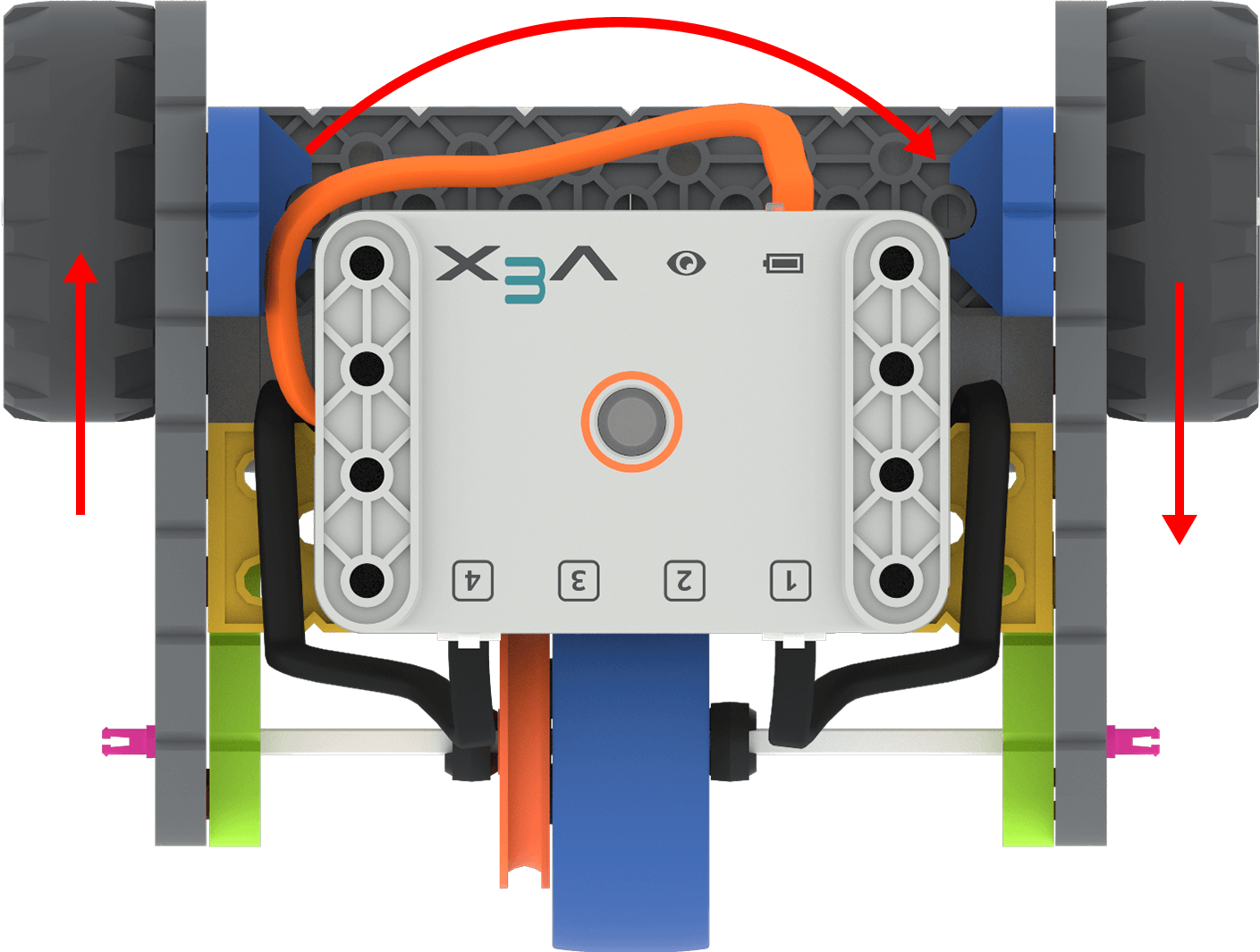
വലത്തേക്ക് തിരിവ് നടത്താൻ, കോഡ് ബേസ് റോബോട്ടിന്റെ ഇടതു മുൻ ചക്രം മുന്നോട്ട് കറങ്ങും, അതേസമയം മുൻ വലത് ചക്രം പിന്നിലേക്ക് കറങ്ങും.
എന്താണ് VEXcode GO?
VEXcode GO എന്നത് VEX GO റോബോട്ടുകളുമായി ആശയവിനിമയം നടത്താൻ ഉപയോഗിക്കുന്ന ഒരു കോഡിംഗ് പരിതസ്ഥിതിയാണ്. റോബോട്ടുകളുടെ പ്രവർത്തനങ്ങൾ നിയന്ത്രിക്കുന്ന VEXcode പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ വിദ്യാർത്ഥികൾ ഡ്രാഗ് ആൻഡ് ഡ്രോപ്പ് ഇന്റർഫേസ് ഉപയോഗിക്കുന്നു. ഓരോ ബ്ലോക്കിന്റെയും ഉദ്ദേശ്യം അതിന്റെ ആകൃതി, നിറം, ലേബൽ തുടങ്ങിയ ദൃശ്യ സൂചനകൾ ഉപയോഗിച്ച് തിരിച്ചറിയാൻ കഴിയും.
ഈ യൂണിറ്റിൽ താഴെ പറയുന്ന VEXcode ബ്ലോക്കുകൾ അവതരിപ്പിക്കും:
{When started} - പ്രോജക്റ്റ് ആരംഭിക്കുമ്പോൾ ഘടിപ്പിച്ചിരിക്കുന്ന ബ്ലോക്കുകളുടെ സ്റ്റാക്ക് ആരംഭിക്കുന്നു.
 |
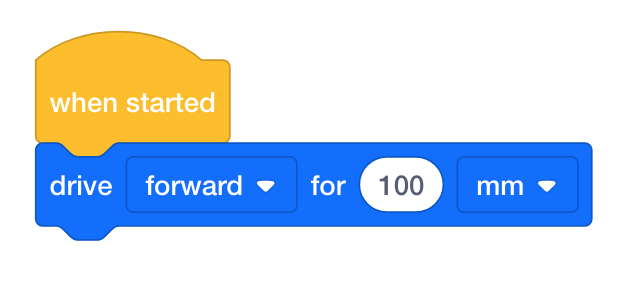 |
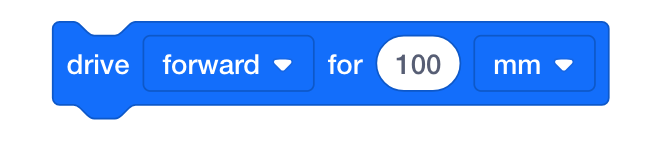
[ഡ്രൈവ് ഫോർ] - ഒരു നിശ്ചിത ദൂരത്തേക്ക് ഡ്രൈവ്ട്രെയിൻ മുന്നോട്ടോ പിന്നോട്ടോ നീക്കുന്നു. ഡ്രൈവ്ട്രെയിൻ ഏത് ദിശയിലേക്ക് നീങ്ങണമെന്ന് തിരഞ്ഞെടുക്കുക, ഓവലിൽ ഒരു മൂല്യം നൽകി അത് എത്ര ദൂരം നീങ്ങണമെന്ന് സജ്ജമാക്കുക.
 |
 |
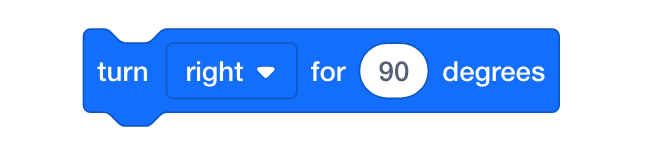
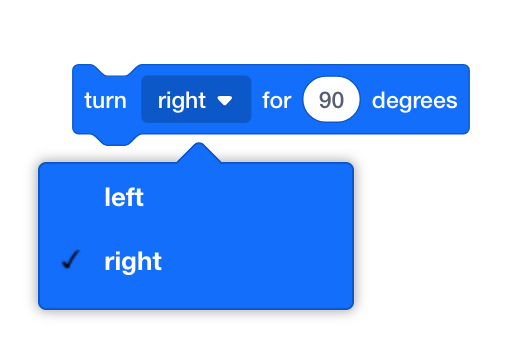
[തിരിക്കുക] - ഒരു നിശ്ചിത എണ്ണം ഡിഗ്രികൾക്കായി ഡ്രൈവ്ട്രെയിൻ ഇടത്തോട്ടോ വലത്തോട്ടോ തിരിക്കുന്നു. ഡ്രൈവ്ട്രെയിൻ തിരിയേണ്ട ദിശ തിരഞ്ഞെടുക്കുക, ഓവലിൽ നിരവധി ഡിഗ്രികൾ നൽകി അത് എത്ര ദൂരം നീങ്ങണമെന്ന് സജ്ജമാക്കുക.
 |
 |
പ്രോഗ്രാമിംഗിലെ വിഘടനവും ക്രമവും എന്താണ്?
ഒരു റോബോട്ടിനെ എങ്ങനെ ചലിപ്പിക്കണമെന്ന് കൃത്യമായും കൃത്യമായും പറയുന്നതിന്, വിഘടനവും ക്രമവും ആവശ്യമാണ്. ആദ്യം, ഒരു വെല്ലുവിളിയിൽ എങ്ങനെ നാവിഗേറ്റ് ചെയ്യാം എന്നതുപോലുള്ള പ്രശ്നം, ചെറിയ ഘട്ടങ്ങളായും പെരുമാറ്റരീതികളായും വിഘടിപ്പിക്കപ്പെടും. പിന്നെ, ഈ സ്വഭാവരീതികൾ തിരിച്ചറിഞ്ഞുകഴിഞ്ഞാൽ, അവയെ ശരിയായ ക്രമത്തിൽ ക്രമീകരിക്കേണ്ടതുണ്ട്. ഇത് പ്രധാനമാണ്, കാരണം റോബോട്ട് അത് പ്രോഗ്രാം ചെയ്തതുപോലെ മാത്രമേ നീങ്ങുകയുള്ളൂ.
വിഘടനം
വിഘടനം എന്നത് സങ്കീർണ്ണമായ ഒരു പ്രശ്നത്തെ കൂടുതൽ കൈകാര്യം ചെയ്യാവുന്നതും മനസ്സിലാക്കാൻ എളുപ്പമുള്ളതുമായ പെരുമാറ്റരീതികളായി വിഭജിക്കുന്നതിനെയാണ് സൂചിപ്പിക്കുന്നത്. പ്രശ്നത്തെ ചെറിയ ഭാഗങ്ങളായി വിഭജിക്കുന്നത് ഓരോ ഭാഗവും കൂടുതൽ വിശദമായി പരിശോധിക്കാനും കൂടുതൽ എളുപ്പത്തിൽ പരിഹരിക്കാനും കഴിയുമെന്ന് അർത്ഥമാക്കുന്നു. ഉദാഹരണത്തിന്, ഒരു വിദ്യാർത്ഥിക്ക് അവരുടെ റോബോട്ട് ഒരു ചതുരത്തിൽ നീങ്ങണമെങ്കിൽ, അവർ അതിനെ ചെറിയ കമാൻഡുകളായി വിഭജിക്കേണ്ടതുണ്ട്. ബ്രേക്ക്ഡൗൺ പ്രക്രിയ പരിഷ്കരിക്കുന്നത് വിദ്യാർത്ഥികൾക്ക് പരിശീലിക്കേണ്ടത് പ്രധാനമാണ്, കാരണം തുടക്കത്തിൽ കമാൻഡുകളെ ചെറിയ ഘടകങ്ങളായി വിഭജിക്കാൻ അവർക്ക് കഴിയില്ല:
| ഒരു ചതുര ബ്രേക്ക്ഡൗൺ 1-ൽ നീങ്ങുക | ഒരു ചതുര ബ്രേക്ക്ഡൌൺ 2-ൽ നീങ്ങുക | ഒരു ചതുര ബ്രേക്ക്ഡൗണിൽ നീങ്ങുക 3 |
|---|---|---|
|
|
|
ക്രമപ്പെടുത്തൽ
അനുക്രമം എന്നത് പെരുമാറ്റങ്ങൾ നിർവ്വഹിക്കുന്ന പ്രത്യേക ക്രമമാണ്. ഒരു പ്രവൃത്തിയോ സംഭവമോ ഒരു ക്രമത്തിൽ അടുത്ത ക്രമീകൃത പ്രവർത്തനത്തിലേക്ക് നയിക്കുന്നു. വിദ്യാർത്ഥികൾക്ക് അവരുടെ റോബോട്ടുകളെ ഒരു ജോലി ശരിയായി നിർവഹിക്കുന്നതിന് പ്രോഗ്രാം ചെയ്യാൻ കഴിയുന്ന തരത്തിൽ ക്രമപ്പെടുത്തൽ പ്രധാനമാണ്.
റോബോട്ടുകൾ ചെയ്യുന്ന യഥാർത്ഥ ജോലികളെ അനുകരിക്കുന്ന വിവിധ ജോലികൾ പൂർത്തിയാക്കുന്നതിന് വിദ്യാർത്ഥികൾ അവരുടെ കോഡ് ബേസ് റോബോട്ടിനെ പ്രോഗ്രാം ചെയ്യും. വെല്ലുവിളികളെ നേരിടാൻ അവരുടെ കോഡ് ബേസ് റോബോട്ട് ശരിയായ ക്രമത്തിൽ മുന്നോട്ടും പിന്നോട്ടും ഇടത്തോട്ടും വലത്തോട്ടും നീങ്ങുന്ന തരത്തിൽ അവരുടെ പ്രോഗ്രാമിലെ കമാൻഡുകൾ ക്രമപ്പെടുത്തേണ്ടതുണ്ട്.
- മുന്നോട്ട് നീങ്ങുക
- വലത്തോട്ട് തിരിയുക
- മുന്നോട്ട് നീങ്ങുക
VEX GO പീസുകൾ
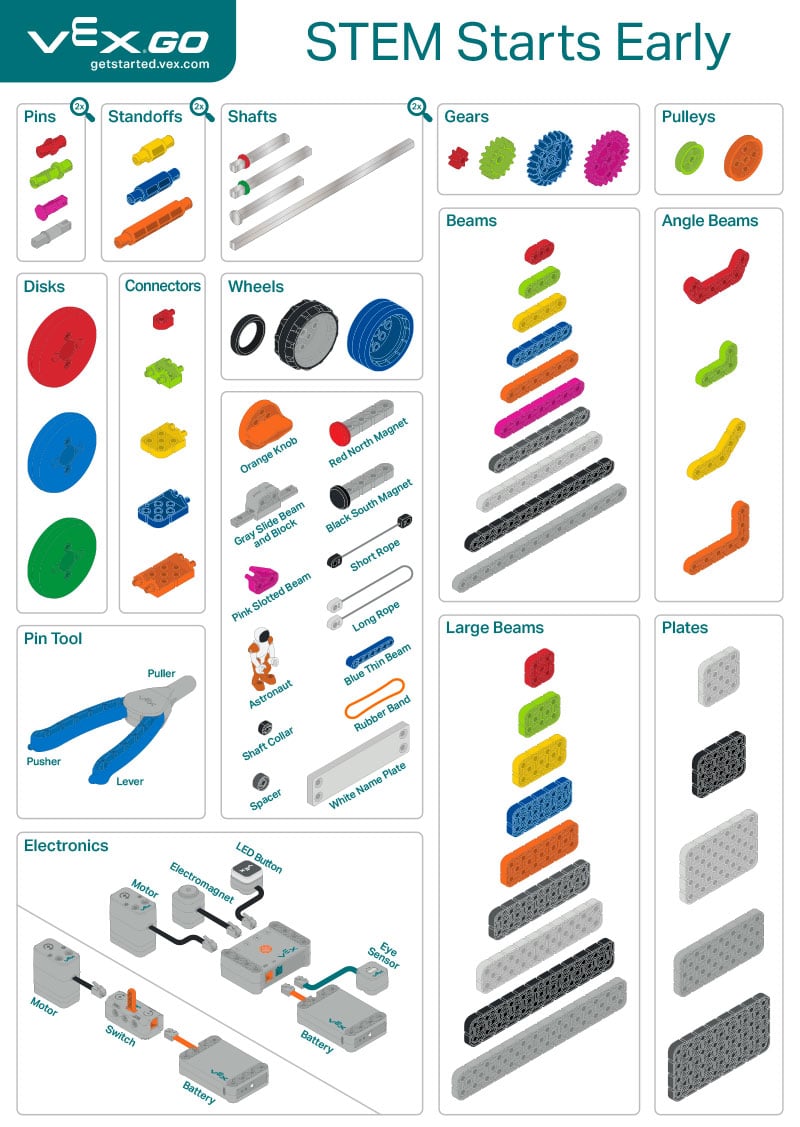
താഴെ പറയുന്ന VEX GO ഭാഗങ്ങൾ കോഡ് ബേസ് റോബോട്ട് നിർമ്മാണത്തിന്റെ അവശ്യ ഭാഗങ്ങളാണ്. VEX GO പോസ്റ്റർ എല്ലാ VEX GO ഭാഗങ്ങളും ചിത്രീകരിക്കുകയും ഒരു ബിൽഡിലെ അവയുടെ പ്രവർത്തനത്തിനനുസരിച്ച് അവയെ ക്രമീകരിക്കുകയും ചെയ്യുന്നു. VEX GO കഷണങ്ങളെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾ VEX GO കിറ്റ് VEX ലൈബ്രറി ലേഖനത്തിലെ പീസുകൾ എന്നതിൽ കാണാം.
ഇലക്ട്രോണിക്സ്
VEX GO ബിൽഡ് ഫംഗ്ഷനുകൾക്ക് പവർ നൽകുന്നതിനും നിയന്ത്രിക്കുന്നതിനും ഇലക്ട്രോണിക് ഘടകങ്ങൾ ഉപയോഗിക്കുന്നു.
ഇലക്ട്രോണിക്സ് ഉൾപ്പെടുന്ന ഏതൊരു VEX GO നിർമ്മാണത്തിനും ബാറ്ററി അത്യാവശ്യമാണ്. VEX GO ഇലക്ട്രോണിക് ഘടകങ്ങൾക്ക് വൈദ്യുതി നൽകുന്നത് ബാറ്ററിയാണ്.
ഒരു VEXcode GO പ്രോജക്റ്റ് ആരംഭിക്കുന്ന ഏതൊരു VEX GO ബിൽഡിനും ബ്രെയിൻ അത്യാവശ്യമാണ്. ഉപയോക്തൃ പ്രോജക്ടുകൾ നടപ്പിലാക്കുന്നതും തലച്ചോറുമായി ബന്ധിപ്പിച്ചിരിക്കുന്ന ഉപകരണങ്ങളെ നിയന്ത്രിക്കുന്നതും തലച്ചോറാണ്.
മോട്ടോർ ഊർജ്ജത്തെ ഒരു നിർമ്മാണത്തിൽ ഉപയോഗിക്കാൻ കഴിയുന്ന ചലനമാക്കി മാറ്റുന്നു. മോട്ടോർ തലച്ചോറുമായി ബന്ധിപ്പിച്ച് ഒരു VEXcode GO പ്രോജക്റ്റ് വഴി നിയന്ത്രിക്കാൻ കഴിയും.