
ในหน่วยการเขียนโค้ดนี้ นักเรียนจะได้เรียนรู้วิธีทำงานกับ VEXcode GO และหุ่นยนต์ Code Base เพื่อแก้ปัญหาความท้าทายที่แท้จริงสำหรับหุ่นยนต์การเขียนโค้ดในที่ทำงาน นักเรียนจะได้เรียนรู้วิธีการวางแผน สร้าง และเริ่มโครงการ VEXcode GO ด้วยหุ่นยนต์ Code Base ตามสถานการณ์จริงสี่สถานการณ์
หุ่นยนต์ทำงานประเภทใดบ้าง?
หุ่นยนต์สามารถทำงานที่สกปรก น่าเบื่อ หรืออันตรายเกินกว่าที่มนุษย์จะทำได้ งานเหล่านี้หลายงานก็รายได้ไม่ดีเช่นกัน ตัวอย่างเช่น มนุษย์กำลังเสี่ยงชีวิตเมื่อปฏิบัติงาน เช่น การดับไฟหรือการดำน้ำลึกลงไปในมหาสมุทร หุ่นยนต์มีฮาร์ดแวร์เพื่อให้สามารถรักษาสภาพแวดล้อมประเภทนี้ได้ ทำให้เป็นตัวเลือกที่เหมาะสมและปลอดภัยยิ่งขึ้น อุตสาหกรรมต่างๆ นำหุ่นยนต์มาใช้ในที่ทำงานเพื่อทำงานที่สกปรก น่าเบื่อ หรือเป็นอันตรายเพื่อปกป้องผู้คน ในขณะเดียวกันก็ทำให้ทรัพยากรมนุษย์มีอิสระในการทำงานในกระบวนการที่ซับซ้อนหรือมีการโต้ตอบมากขึ้น มนุษย์ยังมีอะไรต้องทำอีกมากหากหุ่นยนต์รับงานสกปรก อันตราย และน่าเบื่อเหล่านี้ ความก้าวหน้าทางเทคโนโลยีได้นำมาซึ่งการเปลี่ยนแปลงตลอดประวัติศาสตร์ของอุตสาหกรรม หุ่นยนต์ก็ไม่ต่างกัน

แต่ละบทเรียนในหน่วยนี้จะสำรวจสถานการณ์ในโลกแห่งความเป็นจริงที่หุ่นยนต์ทำงานสกปรก อันตราย และน่าเบื่อในอุตสาหกรรมต่างๆ นักเรียนสามารถเป็นนักแก้ปัญหาเชิงสร้างสรรค์ได้ด้วยการสร้างสรรค์วิธีแก้ปัญหาสำหรับความท้าทายในชีวิตจริง เช่น วิธีเขียนโค้ดหุ่นยนต์เพื่อทำงานที่สกปรก น่าเบื่อ และอันตราย ในขณะที่ใช้ VEX GO Kits นักเรียนจะวิเคราะห์ความสามารถของหุ่นยนต์ Code Base ที่สามารถเคลื่อนที่ได้อย่างไรโดยใช้ VEXcode GO และใช้ความรู้นี้เพื่อระดมความคิดงาน สถานการณ์ หรือปัญหาต่างๆ ที่สามารถแก้ไขได้โดยใช้หุ่นยนต์ Code Base
งานสกปรก
งานสกปรกเป็นงานที่ไม่สะอาดหรือเป็นอันตรายซึ่งอาจส่งผลกระทบต่อสุขภาพของมนุษย์ หุ่นยนต์สามารถทำงานที่ไม่เอื้ออำนวยเหล่านี้และจำกัดการสัมผัสของมนุษย์ต่อสภาวะที่ไม่สะอาด
หุ่นยนต์ถูกนำมาใช้งานสกปรก เช่น การสำรวจเหมืองและการลาดตระเวนท่อน้ำทิ้ง เมื่อเกิดปัญหาท่อน้ำทิ้ง เจ้าหน้าที่จะปิดท่อ ขุดเพื่อเข้าถึงท่อ แล้วซ่อมแซมโครงสร้างพื้นฐาน แต่หุ่นยนต์สามารถทำความสะอาด สร้างแผนที่ และตรวจสอบท่อก่อนที่ปัญหาจะเกิดขึ้น
งานที่น่าเบื่อ
งานที่ต้องมีการทำงานซ้ำๆ ต้องใช้ความคิดของมนุษย์เพียงเล็กน้อยถือว่าน่าเบื่อ มักรวมถึงกระบวนการที่มีวัตถุประสงค์เพียงอย่างเดียวคือประสิทธิภาพและผลผลิต หุ่นยนต์สามารถทำงานได้ตลอด 24 ชั่วโมงเพื่อปรับปรุงงานที่น่าเบื่อ ซึ่งจะทำให้ทุนมนุษย์มีอิสระสำหรับงานที่มีองค์ประกอบหลากหลายและจำเป็นต้องมีการคิดอย่างมีวิจารณญาณ

ตัวอย่างเช่น ด้วยการเติบโตของอีคอมเมิร์ซ ความต้องการศูนย์ปฏิบัติตามคำสั่งซื้อเพิ่มมากขึ้น หุ่นยนต์เพิ่มเวลาสั่งซื้อถึงการส่งมอบ ลดข้อผิดพลาด และลดภาระให้กับคนงาน
งานที่เป็นอันตราย
งานที่อันตรายทำให้มนุษย์ตกอยู่ในสถานการณ์ที่เป็นอันตราย หุ่นยนต์สามารถใช้ในงานเหล่านี้เพื่อป้องกันการบาดเจ็บ หุ่นยนต์สามารถกลบเกลื่อนระเบิด สำรวจดาวเคราะห์ที่อยู่ห่างไกล ตรวจสอบโครงสร้างที่ไม่เสถียร และช่วยต่อสู้กับไฟ หุ่นยนต์ไม่จำเป็นต้องลบมนุษย์ออกจากสมการ แต่หุ่นยนต์สามารถตั้งโปรแกรมหรือควบคุมจากระยะไกลได้ เพื่อป้องกันไม่ให้พนักงานตกอยู่ในสถานการณ์ที่อันตรายที่สุด

หุ่นยนต์สามารถช่วยนักดับเพลิงประเมินอาคารที่กำลังลุกไหม้ได้ SmokeBot สร้างแผนที่ภายในที่นักดับเพลิงสามารถใช้ในภายหลังเพื่อหาทางรอบๆ อาคารที่กำลังลุกไหม้ Thermite Robot มีสายยางที่สามารถสูบน้ำได้ 1,893 ลิตร (~500 แกลลอน) ต่อนาที Thermite Robot ใช้กล้องที่ติดตั้งอยู่ จึงสามารถเดินทางเข้าสู่ไฟที่อันตรายอย่างยิ่งได้ในขณะที่ถูกควบคุมจากระยะไกลถึงสี่ไมล์
ระบบขับเคลื่อนคืออะไร?
ระบบขับเคลื่อนช่วยให้หุ่นยนต์เคลื่อนที่ไปข้างหน้า ถอยหลัง ซ้ายหรือขวาโดยใช้ล้อหรือวิธีการอื่นๆ
หุ่นยนต์ Code Base มีระบบขับเคลื่อน 2 มอเตอร์เนื่องจากมีมอเตอร์สองตัว (ตัวหนึ่งอยู่ด้านซ้ายและอีกตัวอยู่ทางด้านขวา) ที่กำลังขับเคลื่อนอยู่ แม้ว่าหุ่นยนต์ Code Base จะมีสี่ล้อ แต่มีเพียงสองล้อเท่านั้นที่ขับเคลื่อนด้วยมอเตอร์ Blue Wheels ช่วยให้หุ่นยนต์ Code Base มีความเสถียรเพื่อไม่ให้ล้ม คุณนึกภาพออกไหมว่า Code Base พยายามเคลื่อนที่ด้วยสองล้อเท่านั้น? มันอาจจะล้มลงทันทีที่ขับไปข้างหน้าหรือข้างหลัง

หุ่นยนต์ฐานโค้ดหมุนโดยใช้ระบบขับเคลื่อนอย่างไร
หุ่นยนต์ Code Base หมุนโดยหมุนล้อไปในทิศทางตรงกันข้าม หากต้องการหมุน ซ้าย รอบ ล้อหน้าซ้ายของหุ่นยนต์ Code Base จะหมุนไปข้างหลัง ในขณะที่ล้อหน้าขวาจะหมุนไปข้างหน้า

ในการเลี้ยว ขวา ครั้ง ล้อหน้าซ้ายของหุ่นยนต์ Code Base จะหมุนไปข้างหน้า ในขณะที่ล้อหน้าขวาจะหมุนไปข้างหลัง

VEXcode GO คืออะไร?
VEXcode GO เป็นสภาพแวดล้อมการเขียนโค้ดที่ใช้ในการสื่อสารกับ VEX GO Robots นักเรียนใช้อินเทอร์เฟซแบบลากและวางเพื่อสร้างโปรเจ็กต์ VEXcode ที่ควบคุมการทำงานของโรบ็อตของตน วัตถุประสงค์ของแต่ละบล็อกสามารถระบุได้โดยใช้ภาพ เช่น รูปทรง สี และป้ายกำกับ
บล็อก VEXcode ต่อไปนี้จะถูกนำมาใช้ในหน่วยนี้:
{When started} - เริ่มสแต็กบล็อกที่แนบมาเมื่อเริ่มต้นโปรเจ็กต์

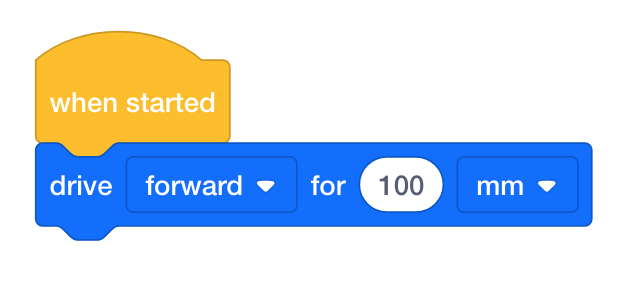
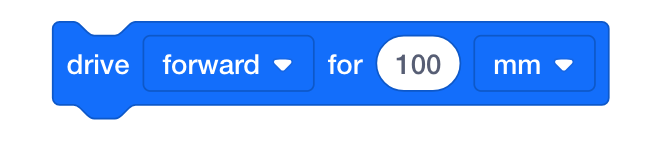
[Drive for] - เลื่อนระบบขับเคลื่อนไปข้างหน้าหรือถอยหลังตามระยะทางที่กำหนด เลือกทิศทางที่ระบบขับเคลื่อนจะเคลื่อนที่ และตั้งค่าว่าจะเคลื่อนที่ไปไกลแค่ไหนโดยป้อนค่าในวงรี

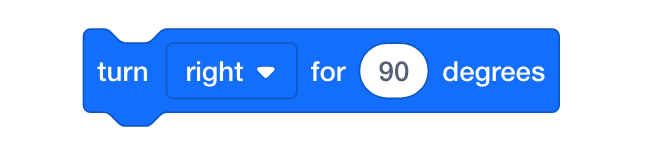
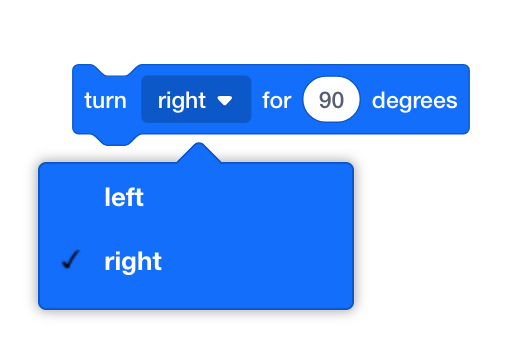
[หมุนเพื่อ] - หมุนระบบขับเคลื่อนไปทางซ้ายหรือขวาตามจำนวนองศาที่กำหนด เลือกทิศทางที่ระบบขับเคลื่อนจะหมุน และตั้งค่าว่าจะเคลื่อนที่ไปไกลแค่ไหนโดยป้อนตัวเลของศาในวงรี
การสลายตัวและการเรียงลำดับในการเขียนโปรแกรมคืออะไร?
เพื่อที่จะบอกหุ่นยนต์ได้อย่างแม่นยำและแม่นยำถึงวิธีการเคลื่อนที่ จำเป็นต้องมีทั้งการสลายตัวและการจัดลำดับ ประการแรก ปัญหา เช่น วิธีการนำทางในการท้าทาย จะถูกแยกย่อยเป็นขั้นๆ และพฤติกรรมที่น้อยลง จากนั้นเมื่อระบุพฤติกรรมเหล่านี้ได้แล้ว จะต้องจัดลำดับพฤติกรรมเหล่านี้ให้ถูกต้อง นี่เป็นสิ่งสำคัญ เนื่องจากหุ่นยนต์จะเคลื่อนที่ตามที่ถูกตั้งโปรแกรมไว้เท่านั้น
การสลายตัว
การสลายตัว เกี่ยวข้องกับการแจกแจงปัญหาที่ซับซ้อนออกเป็นพฤติกรรมที่สามารถจัดการได้ง่ายกว่าและเข้าใจง่ายกว่า การแบ่งปัญหาออกเป็นส่วนเล็กๆ หมายความว่าแต่ละส่วนสามารถตรวจสอบได้ละเอียดยิ่งขึ้น และแก้ไขได้ง่ายขึ้น ตัวอย่างเช่น หากนักเรียนต้องการให้หุ่นยนต์เคลื่อนที่เป็นสี่เหลี่ยม พวกเขาจะต้องแยกย่อยออกเป็นคำสั่งเล็กๆ การปรับปรุงกระบวนการแจกแจงเป็นสิ่งสำคัญสำหรับนักเรียนในการฝึกฝน เนื่องจากพวกเขาอาจไม่แบ่งคำสั่งออกเป็นองค์ประกอบย่อยๆ ในตอนแรก:
| เคลื่อนที่เป็นตารางย่อย 1 | เคลื่อนที่เป็นตารางย่อย 2 | เคลื่อนที่เป็นสี่เหลี่ยมจัตุรัส 3 |
|---|---|---|
|
|
|
การเรียงลำดับ
ลำดับที่ คือลำดับเฉพาะในการดำเนินการพฤติกรรม การกระทำหรือเหตุการณ์นำไปสู่การกระทำลำดับถัดไปในลำดับ การจัดลำดับเป็นสิ่งสำคัญเพื่อให้นักเรียนสามารถตั้งโปรแกรมหุ่นยนต์ให้ทำงานได้อย่างถูกต้อง
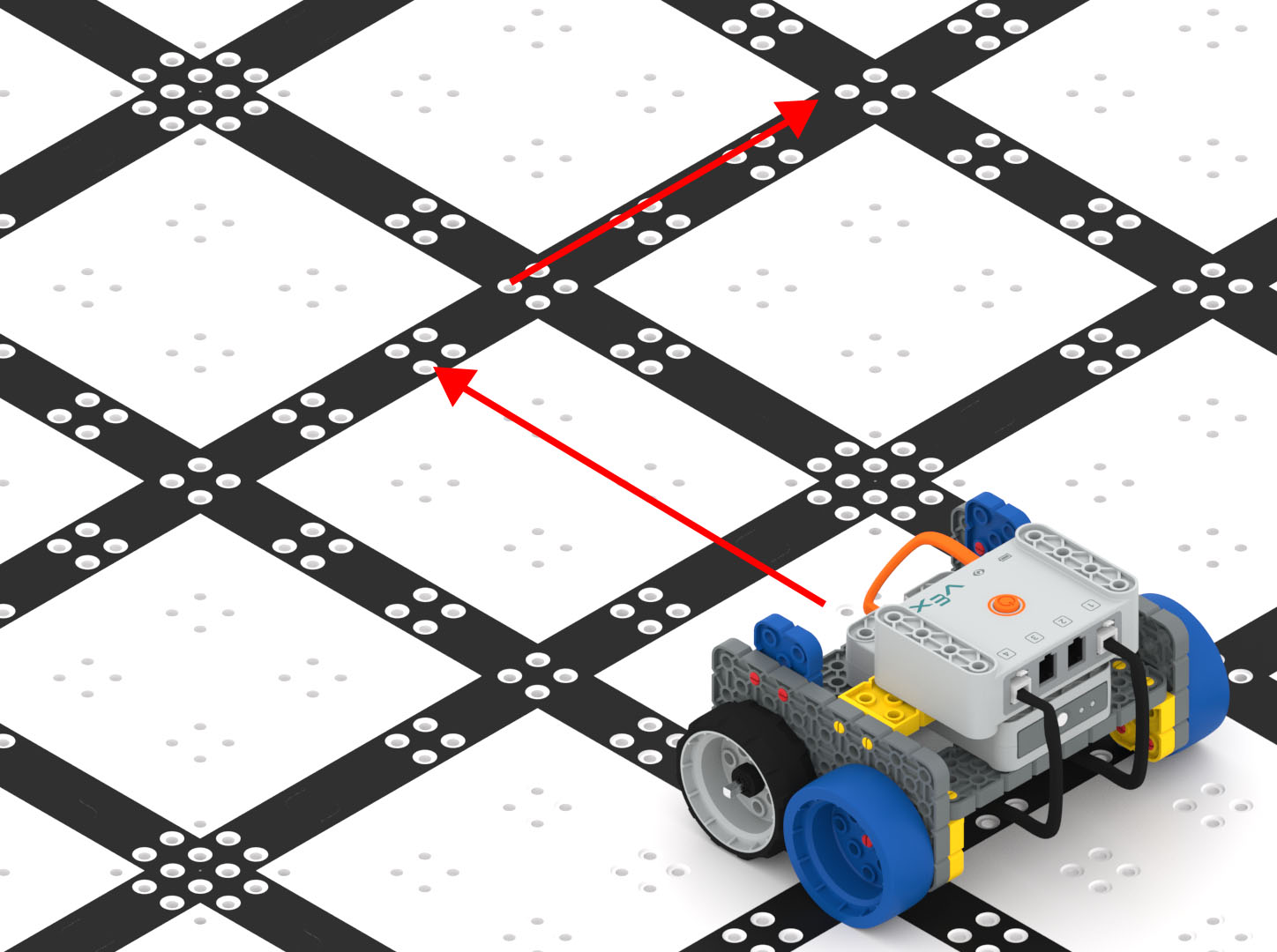
นักเรียนจะตั้งโปรแกรมหุ่นยนต์ Code Base ของตนเพื่อทำงานต่างๆ ให้สำเร็จโดยเลียนแบบงานจริงที่หุ่นยนต์ทำ พวกเขาจะต้องเรียงลำดับคำสั่งในโปรแกรมเพื่อให้หุ่นยนต์ Code Base เคลื่อนที่ไปข้างหน้า ถอยหลัง ซ้ายและขวาตามลำดับที่ถูกต้องเพื่อนำทางความท้าทาย
- ก้าวไปข้างหน้า
- เลี้ยวขวา
- ก้าวไปข้างหน้า
ชิ้นส่วน VEX GO
ชิ้นส่วน VEX GO ต่อไปนี้เป็นส่วนสำคัญของโครงสร้างหุ่นยนต์ Code Base โปสเตอร์ VEX GO จะแสดงชิ้นส่วน VEX GO ทั้งหมด และจัดเรียงตามฟังก์ชันในโครงสร้าง ข้อมูลเพิ่มเติมเกี่ยวกับชิ้นส่วน VEX GO สามารถพบได้ในบทความ ชิ้นใน VEX GO Kit VEX Library
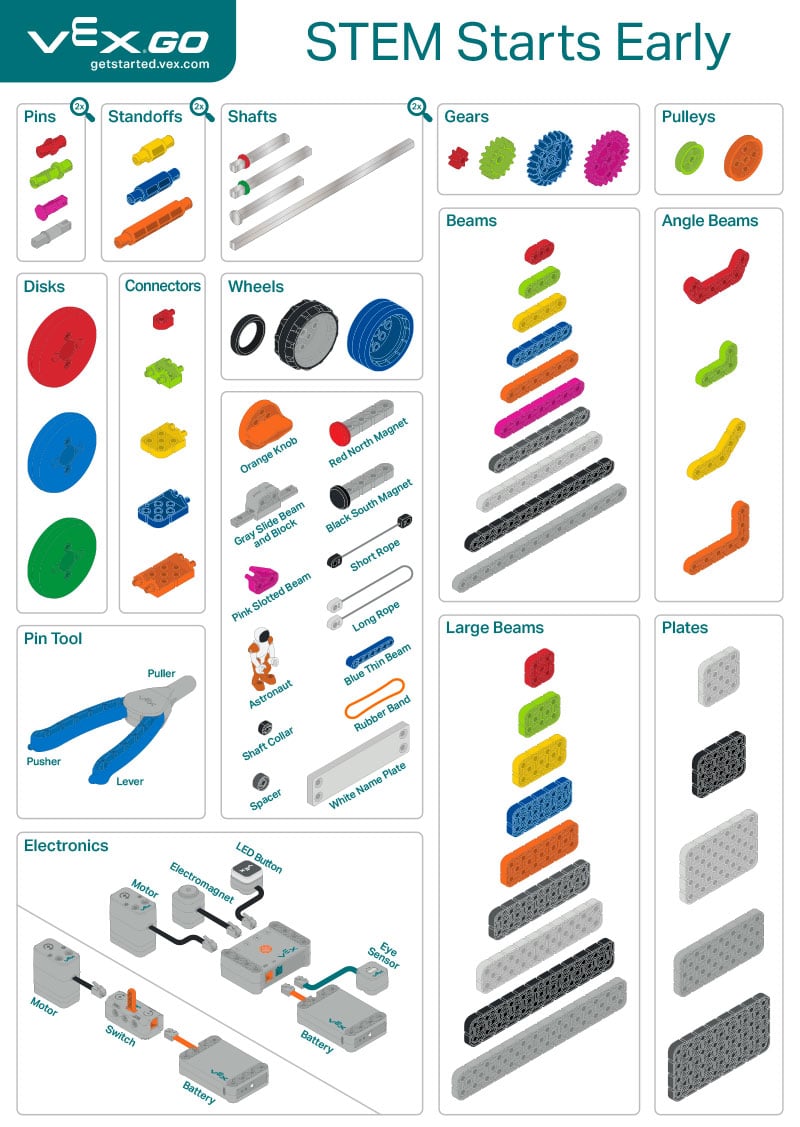 ชิ้นส่วนชุดอุปกรณ์ VEX GO
ชิ้นส่วนชุดอุปกรณ์ VEX GO อิเล็กทรอนิกส์
ชิ้นส่วนอิเล็กทรอนิกส์ใช้ในการจ่ายไฟและควบคุมฟังก์ชันการสร้าง VEX GO
Battery เป็นสิ่งจำเป็นสำหรับ VEX GO build ใดๆ ที่มีอุปกรณ์อิเล็กทรอนิกส์ แบตเตอรี่ให้พลังงานแก่ชิ้นส่วนอิเล็กทรอนิกส์ VEX GO
Brain เป็นสิ่งจำเป็นสำหรับ VEX GO build ใดๆ ที่เริ่มต้นโดยโปรเจ็กต์ VEXcode GO The Brain ดำเนินโครงการผู้ใช้ รายและควบคุมอุปกรณ์ที่เชื่อมต่อกับ Brain
มอเตอร์ เปลี่ยนพลังงานเป็นการเคลื่อนไหวที่สามารถนำมาใช้ในการประกอบได้ มอเตอร์สามารถเชื่อมต่อกับสมองและควบคุมโดยโครงการ VEXcode GO