
En esta unidad de codificación, los estudiantes aprenderán cómo trabajar con VEXcode GO y el robot Code Base para resolver desafíos auténticos para robots de codificación en el lugar de trabajo. Los estudiantes aprenderán a planificar, crear e iniciar proyectos VEXcode GO con el robot Code Base basándose en cuatro escenarios del mundo real.
¿Qué tipos de trabajos hacen los robots?
Los robots pueden realizar trabajos que son demasiado sucios, aburridos o peligrosos para que los realicen los humanos. Muchos de estos empleos tampoco están bien remunerados. Por ejemplo, los humanos ponen en riesgo sus vidas al realizar tareas como apagar incendios o bucear en las profundidades del océano. Los robots tienen el hardware para poder mantenerse en este tipo de entornos, lo que los convierte en la opción más adecuada y segura. Las industrias implementan robots en el lugar de trabajo para realizar estos trabajos sucios, aburridos o peligrosos para proteger a las personas, al mismo tiempo que liberan recursos humanos para trabajar en procesos más complejos o interactivos. Los seres humanos todavía tienen mucho que hacer si los robots realizan estos trabajos sucios, peligrosos y aburridos. Los avances tecnológicos han traído cambios a lo largo de la historia de la industria. Los robots no son diferentes.

Cada lección de esta unidad investiga un escenario del mundo real en el que los robots realizan trabajos sucios, peligrosos y aburridos en diversas industrias. Los estudiantes pueden ser solucionadores de problemas innovadores al crear soluciones para desafíos de la vida real, como cómo codificar robots para realizar tareas sucias, aburridas y peligrosas. Mientras usan los kits VEX GO, los estudiantes analizarán las capacidades de cómo el robot Code Base puede moverse usando VEXcode GO y usarán este conocimiento para generar ideas sobre diferentes trabajos, escenarios o problemas que se pueden resolver usando el robot Code Base.
Trabajos sucios
Los trabajos sucios son trabajos insalubres o peligrosos que pueden afectar la salud humana. Los robots pueden realizar estos trabajos desfavorables y limitar la exposición humana a condiciones insalubres.
Se han implementado robots en trabajos sucios como la exploración de minas y el reconocimiento de alcantarillas. Cuando hay un problema con una tubería de alcantarillado, un equipo la cierra, excava para acceder a la tubería y luego repara la infraestructura. Pero un robot puede limpiar, mapear e inspeccionar tuberías antes de que surjan los problemas.
Trabajos aburridos
Los trabajos que requieren funciones repetitivas requieren poco pensamiento humano y se consideran aburridos. A menudo incluyen procesos que tienen el único objetivo de eficiencia y producción. Los robots pueden trabajar las 24 horas del día para agilizar trabajos aburridos, lo que libera capital humano para tareas que tienen un elemento de variedad y necesidad de pensamiento crítico.

Por ejemplo, con el crecimiento del comercio electrónico, existe una necesidad cada vez mayor de centros logísticos. Los robots aumentan los tiempos desde el pedido hasta la entrega, reducen los errores y minimizan la carga de los trabajadores humanos.
Trabajos peligrosos
Los trabajos peligrosos ponen a los humanos en situaciones perjudiciales. Se pueden utilizar robots en estos trabajos para evitar lesiones. Los robots pueden desactivar bombas, atravesar planetas distantes, inspeccionar estructuras inestables y ayudar a combatir incendios. Los robots no necesariamente eliminan a los humanos de la ecuación, pero pueden programarse o controlarse de forma remota para mantener a los trabajadores fuera de las situaciones más peligrosas.

Los robots pueden ayudar a los bomberos a evaluar los edificios en llamas. El SmokeBot crea mapas interiores que los bomberos pueden utilizar más adelante para orientarse en un edificio en llamas. El robot Thermite tiene una manguera que es capaz de bombear litros (~500 galones) de agua por minuto. El robot Thermite utiliza cámaras montadas, por lo que puede viajar hacia incendios extremadamente peligrosos mientras es controlado desde hasta un cuarto de milla de distancia.
¿Qué es una transmisión?
Una transmisión permite que un robot se mueva hacia adelante, hacia atrás, hacia la izquierda o hacia la derecha usando ruedas u otros métodos.
El robot Code Base tiene una transmisión de 2 motores porque hay dos motores (uno en el lado izquierdo y otro en el derecho) que están siendo alimentados. Aunque el robot Code Base tiene cuatro ruedas, solo dos de ellas funcionan con motores. Las ruedas azules ayudan al robot Code Base a mantenerse estable para que no se caiga. ¿Te imaginas si Code Base intentara moverse con solo dos ruedas? Es probable que se caiga tan pronto como avance o retroceda.

¿Cómo gira el robot Code Base utilizando una transmisión?
El robot Code Base hace giros haciendo girar las ruedas en direcciones opuestas. Para realizar un giro a a la izquierda, la rueda delantera izquierda del robot Code Base girará hacia atrás, mientras que la rueda delantera derecha girará hacia adelante.

Para hacer un giro a la derecha, la rueda delantera izquierda del robot Code Base girará hacia adelante, mientras que la rueda delantera derecha girará hacia atrás.

¿Qué es VEXcode GO?
VEXcode GO es un entorno de codificación que se utiliza para comunicarse con los robots VEX GO. Los estudiantes usan la interfaz de arrastrar y soltar para crear proyectos VEXcode que controlan las acciones de sus robots. El propósito de cada bloque se puede identificar mediante señales visuales como su forma, color y etiqueta.
En esta unidad se introducirán los siguientes bloques VEXcode:
{When started} : inicia la pila de bloques adjunta cuando se inicia el proyecto.

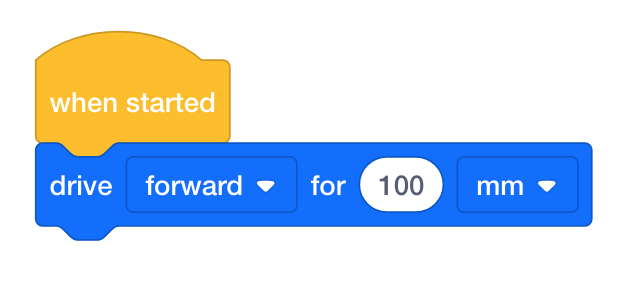
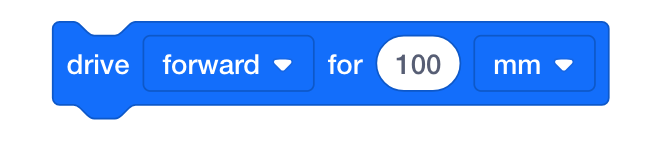
[Drive for] : mueve la transmisión hacia adelante o hacia atrás durante una distancia determinada. Elija en qué dirección se moverá la transmisión y establezca qué tan lejos se moverá ingresando un valor en el óvalo.

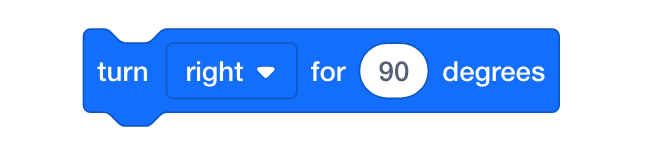
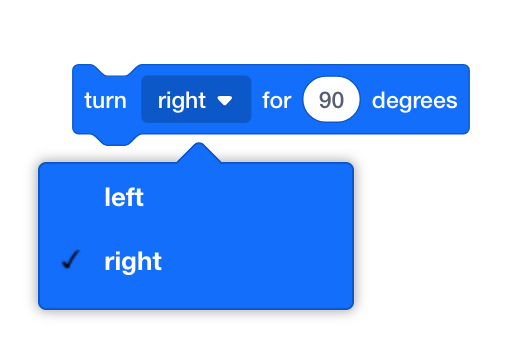
[Girar para] : gira la transmisión hacia la izquierda o hacia la derecha una cantidad determinada de grados. Elija la dirección en la que girará la transmisión y establezca qué tan lejos se moverá ingresando una cantidad de grados en el óvalo.
¿Qué es la descomposición y la secuenciación en programación?
Para decirle a un robot exactamente y con precisión cómo moverse, se necesitan tanto la descomposición como la secuenciación. En primer lugar, el problema, como por ejemplo cómo afrontar un desafío, se descompondrá en incrementos y comportamientos más pequeños. Luego, una vez identificados estos comportamientos, es necesario organizarlos en la secuencia correcta. Esto es importante porque el robot sólo se moverá exactamente como está programado.
Descomposición
La descomposición implica descomponer un problema complejo en comportamientos que son más manejables y fáciles de entender. Dividir el problema en partes más pequeñas significa que cada parte puede examinarse con más detalle y resolverse con mayor facilidad. Por ejemplo, si un estudiante quiere que su robot se mueva en un cuadrado, deberá dividirlo en comandos más pequeños. Es importante que los estudiantes practiquen refinar el proceso de desglose, ya que es posible que al principio no descompongan los comandos en componentes más pequeños:
| Mover en un desglose cuadrado 1 | Mover en un desglose cuadrado 2 | Mover en un desglose cuadrado 3 |
|---|---|---|
|
|
|
Secuenciación
Secuenciación es el orden específico en el que se realizan las conductas. Una acción o evento conduce a la siguiente acción ordenada en una secuencia. La secuenciación es importante para que los estudiantes puedan programar sus robots para realizar correctamente una tarea.
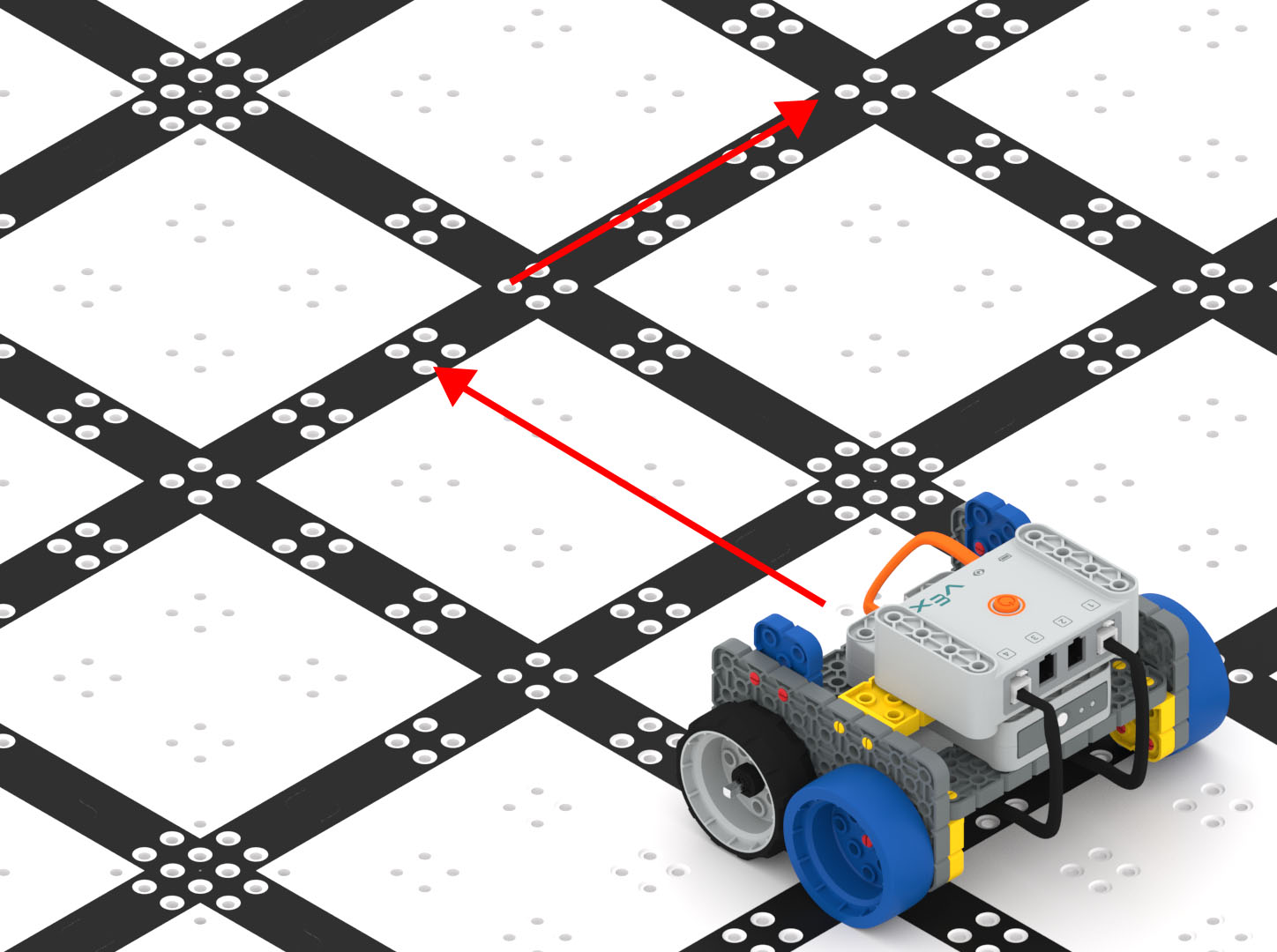
Los estudiantes programarán su robot Code Base para completar una variedad de tareas que imitan trabajos auténticos que realizan los robots. Deberán secuenciar los comandos en su programa para que su robot Code Base se mueva hacia adelante, hacia atrás, hacia la izquierda y hacia la derecha en el orden correcto para afrontar los desafíos.
- avanzar
- Gire a la derecha
- avanzar
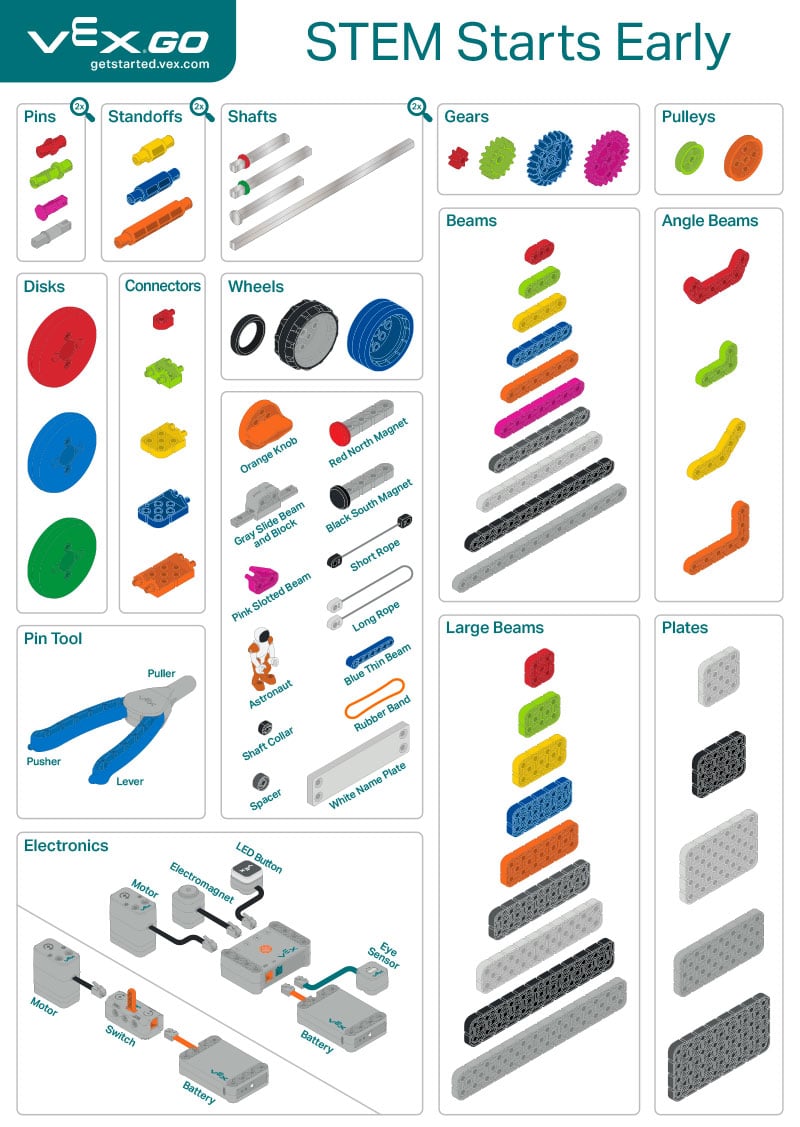
Piezas VEX GO
Las siguientes piezas VEX GO son partes esenciales de la construcción del robot Code Base. El póster VEX GO ilustra todas las piezas VEX GO y las organiza según su función en una construcción. Puede encontrar más información sobre las piezas VEX GO en el artículo Piezas en de la Biblioteca VEX del Kit VEX GO.
Electrónica
Los componentes electrónicos se utilizan para alimentar y controlar las funciones de construcción de VEX GO.
La Battery es esencial para cualquier construcción VEX GO que incluya electrónica. La batería proporciona energía a los componentes electrónicos VEX GO.
El Brain es esencial para cualquier compilación de VEX GO que se inicie mediante un proyecto VEXcode GO. El Cerebro ejecuta proyectos de usuario y controla los dispositivos conectados al Cerebro.
El Motor transforma la energía en movimiento que se puede utilizar en una construcción. El motor se puede conectar al cerebro y controlar mediante un proyecto VEXcode GO.