
Praktik
Pada bagian terakhir, Anda mempelajari tentang manipulator aktif dan pasif serta bagaimana keduanya dirancang untuk memanipulasi objek. Sekarang Anda akan menerapkan apa yang telah Anda pelajari untuk mengulangi desain Clawbot saat ini agar dapat menggerakkan Buckyball secara efisien dalam aktivitas latihan Manipulator!
Dalam kegiatan ini, Anda akan berlatih menggerakkan Buckyball dari tengah Lapangan melalui gawang di ujung Lapangan. Anda akan mengulangi desain manipulator cakar saat ini, atau membuat yang baru untuk memaksimalkan kemampuan Anda dalam menggerakkan Buckyball melewati gawang.
Tonton video di bawah untuk melihat bagaimana Anda dapat menerapkan apa yang telah Anda pelajari untuk menyelesaikan aktivitas latihan Manipulator.
Sekarang giliran Anda untuk menyelesaikan aktivitas latihan Manipulator!
Dalam animasi ini, Pengendali digunakan untuk menggerakkan robot untuk memindahkan Buckyball dari tengah Lapangan melalui gawang di ujung Lapangan yang berlawanan. Animasi ini menunjukkan satu cara yang mungkin untuk menggerakkan Buckyballs. Anda akan mengulang dan menyempurnakan pembuatan manipulator Anda saat menyelesaikan aktivitas latihan Manipulator.
Gunakan dokumen ini sebagai referensi untuk menyelesaikan aktivitas praktik. Google / .docx / .pdf
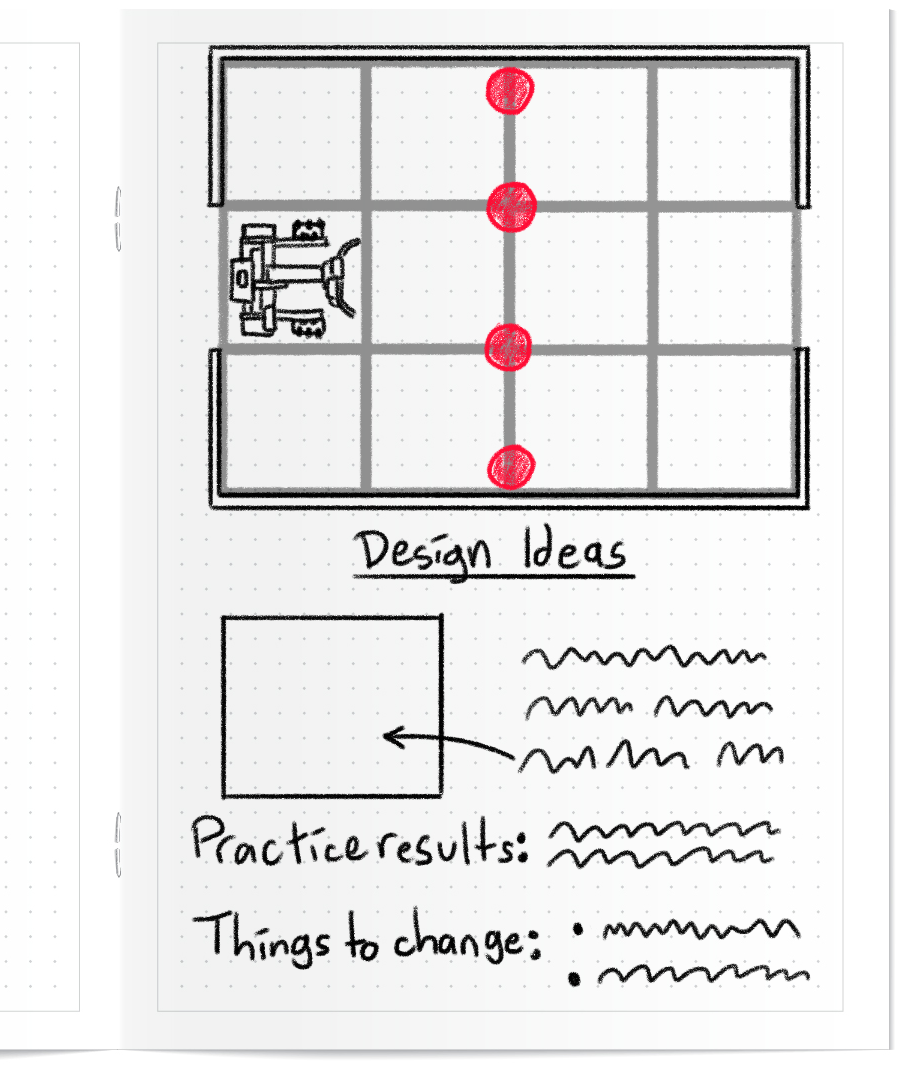
Saat Anda menyelesaikan aktivitas praktik, dokumentasikan desain dan pengujian Anda di buku catatan teknik Anda:
- Pengamatan tentang seberapa baik robot awalnya menggerakkan Buckyball ke gawang.
- Desain asli manipulator Anda.
- Bagaimana Anda mengulangi desain ini untuk meningkatkan kinerja robot Anda dalam aktivitas latihan?
Lihat gambar di sebelah kiri untuk contoh bagaimana Anda dapat merekam ide desain dan pengujian Anda.
Bersiap untuk Tantangan
Dalam Compete (di halaman berikutnya), Anda akan menguji desain manipulator saat berkompetisi dalam Robot Sepak Bola Satu lawan Satu. Pelajari cara berkompetisi dalam tantangan tersebut, periksa pemahaman Anda, lalu berlatihlah untuk tantangan tersebut.
Tujuan dari tantangan ini adalah menggunakan Pengendali untuk menggerakkan robot Anda untuk mencetak gol terbanyak dalam 60 detik.
Tonton animasi ini untuk melihat cara berkompetisi dalam Tantangan Sepak Bola Robot Satu lawan Satu.
Ikuti langkah-langkah dalam dokumen ini untuk mempelajari lebih lanjut tentang cara menyelesaikan tantangan ini. Google / .docx / .pdf
Periksa Pemahaman Anda
Sebelum memulai tantangan, pastikan Anda memahami aturan dan pengaturannya dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda Google / .docx / .pdf
Setelah menyelesaikan pertanyaan, berlatihlah untuk tantangannya.
Pilih Berikutnya > untuk bersaing dalam Tantangan Sepak Bola Robot Satu lawan Satu.